近期,比利时布鲁塞尔自由大学博士生朱炜煦与所在团队提出了一种创新的机器人群体架构——“自组织神经系统”(SoNS,Self-organizing Nervous System)。
它通过模仿自然界中的生物神经系统的组织原理,为机器人群体建立了一套具有明确规则的有序协商机制,从而实现了动态多级系统架构的自主构建、维护和实时重构。
(来源:Science Robotics)
SoNS 架构的关键创新在于其自组织的层次结构设计,它允许机器人群体在完全去中心化条件下,通过局部集中的信息处理方式协调感知、行动和决策的协同优化。
具体而言,该架构具有以下关键特征:
首先,保留了传统群体机器人系统的可扩展性和灵活性优势。
其次,通过引入层级化组织原则,显著提升了群体在复杂任务中的决策效率与执行能力。
更重要的是,系统能够基于局部信息实现全局优化。这些特性极大简化了机器人集群的编程难度。
图丨照片拍摄于新冠疫情后期,经过多年的准备,朱炜煦和团队准备进行第一次实验(来源:朱炜煦)
研究团队通过多模态实验验证了 SoNS 架构的实用价值。在物理实验层面,系统成功协调了由 17 个异构无人机与地面机器人组成的混合群体;在仿真环境中,研究规模进一步扩展至 250 个机器人。
这些实验涵盖了二元决策制定、搜索救援等多个典型应用场景。值得关注的是,所有测试均证实系统具备优异的容错性能,能够确保单个节点的故障不会影响整体系统的稳定运行。这一特性为 SoNS 在现实复杂环境中的应用提供了重要保障。
解决群体智能的关键瓶颈:从“牵一发动全身”到“离了谁都能转”
一般来说,传统群体机器人采用去中心化的模式,即群体中的每个成员地位平等,通过共同协商来解决问题。
然而,这种模式存在两个关键性缺陷:
首先,去中心化机制具有较高的部署成本,研究人员需要为每个机器人单独编程,摸索不同机器人的个体行为所涌现出群体整体效果,这一过程既耗时又耗费资源。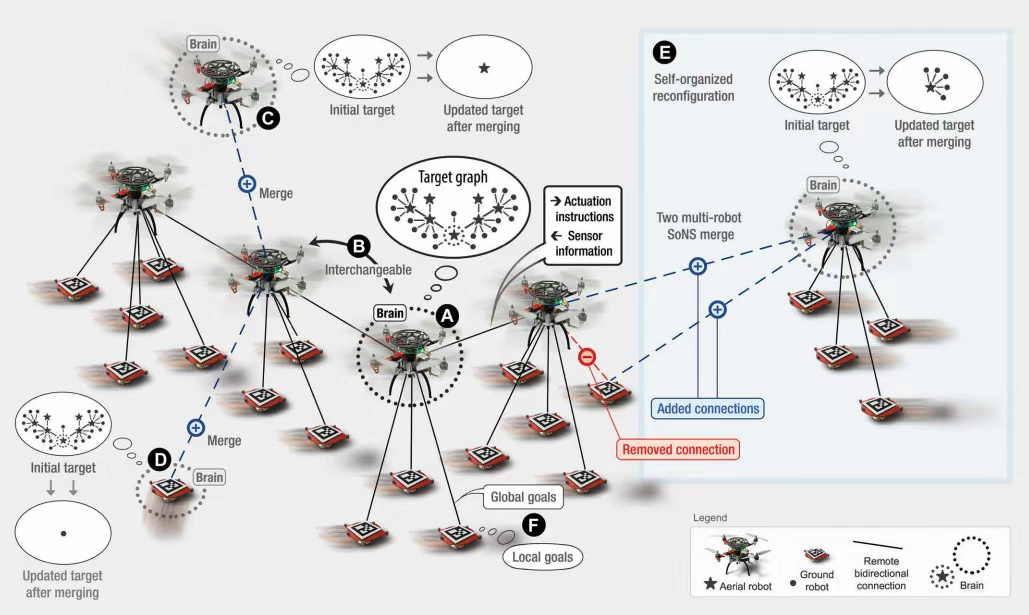
其次,由于通信仅限于相邻机器人之间,每个个体只能获取局部信息,难以形成有效的全局决策,导致系统整体效率低下。
(来源:朱炜煦)
相比之下,SoNS 的优势体现在“自上而下”的控制方式,通过建立有序的信息传递机制克服了传统系统的局限性。
在该架构中,每个机器人基于局部感知信息和邻域通信自主决定其在群体中的角色和行为,同时通过层级化的信息传递机制(类似“接力棒”模式)实现全局信息的分布式共享。
图丨 SoNS 概念(来源:Science Robotics)
这种设计使得机器人群体能够基于更全面的信息做出接近全局最优的决策,与此同时,保持对环境变化和任务需求的快速响应能力,并维持系统整体的稳定性和运行效率。更重要的是,SoNS 允许将机器人集群视为单一实体进行编程,大幅简化了新任务的部署流程。
实验验证表明,SoNS 架构在多个维度展现出显著优势。在功能性测试中,系统成功完成了障碍物避让、集体感知与行动、二元决策制定以及群体分裂合并等复杂任务。
具体表现为:在障碍规避场景下,机器人群体能自主调整形态并保持连接;面对动态环境变化,系统可实时优化行动路线;在二元决策任务中,实现了传统系统难以完成的群体共识。
Science Robotics 新型层级化架构实现250个机器人智能组队,“单点故障”系统仍可稳定运行 观看更多转载,Science Robotics 新型层级化架构实现250个机器人智能组队,“单点故障”系统仍可稳定运行CAAI认知系统与信息处理专委会已关注分享点赞在看已同步到看一看写下你的评论 视频详情 (来源:Science Robotics)
在容错性方面,SoNS 展现出类生物系统的自修复特性。通过动态邻域连接机制,当检测到相邻机器人失效时,系统能自动重建通信链路并重组拓扑结构。这种“去中心化冗余”设计确保了系统在部分节点失效时仍能维持功能完整,这对实际应用中的可靠性至关重要。
“就像我们经常说的‘地球离了谁都能转’那样,即使部分机器人发生故障或失去连接,SoNS 架构仍能够快速重新组织,并利用剩余的机器人继续完成任务,这种容错能力对于机器人群体在现实世界中的应用至关重要。”朱炜煦解释说道。
具体来说,每个机器人只与相邻的机器人通信。如果发现相邻的机器人不见了,它会迅速与下一个机器人建立连接。连接成功后,它们会调整结构并继续寻找下一个通信伙伴。这样,即使有一部分机器人失效,相邻的机器人也能迅速填补这个缺口。
此外,SoNS 架构在模拟实验中展现了良好的可扩展性。研究人员在真实环境下,进行了 17 个机器人集群实验。在模拟环境中测试了多达 250 个机器人的群体。结果表明,SoNS 架构能够在这样大规模的群体中有效地工作,且通信和计算负荷保持在合理范围内。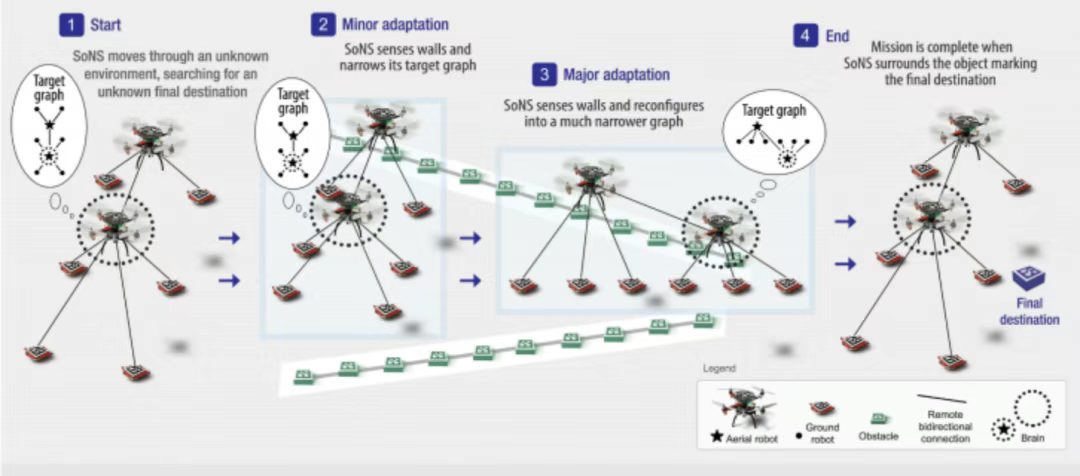
图丨集体感知和驱动(来源:Science Robotics)
在论文发表后,该课题组进一步将规模扩大到 1000 台机器人。朱炜煦指出,随着群体规模扩大,单个机器人的计算开销保持恒定,不会出现性能退化。这一特性源于群体机器人固有的可扩展性,群体中所有机器人都只依靠有限的局部信息,群体规模的扩大不会对单个机器人产生影响。
实际上,SoNS 指导群体机器人从传统的无序状态转变为一种有规模、有秩序的状态。同时,SoNS 架构也保留了群体机器人固有的特点——即使部分机器人失效,整个系统也能够顺利完成任务。
另一个值得关注的方面在于,SoNS 在群体决策方面取得的突破。传统去中心化系统实现效率不高的二元共识问题,在该架构下得到了有效解决。
这一进步不仅具有理论意义,更为机器人集群在需要快速集体决策的场景(如应急响应、协同搜索等)中的应用开辟了新途径。
用筷子“夹”出摄像头的稳定性
该研究共经历 7 年时间,贯穿了朱炜煦的整个博士生涯。实际上,该研究中最耗时的部分并不是算法开发和优化,而是搭建和调试硬件平台,包括研制定制化无人机和地面移动机器人,以及搭建完整的实验环境。
在硬件研发过程中,该团队面临诸多技术难题。以无人机平台为例,研究人员发现,当搭载底部摄像头的无人机起飞后,由于机体振动导致拍摄画面严重模糊,这一问题直接影响了视觉定位和群体协同的精度。
在一次与课题组成员的技术讨论中,朱炜煦受到日常生活中使用筷子固定物品的启发,提出了采用类似原理的机械稳定方案。
初步实验证实这一构想的有效性,但考虑到工程应用的严谨性,他们最终基于“筷子原理”设计了更为专业的减震机构,通过优化机械结构和材料选择,系统性地解决了这一技术瓶颈。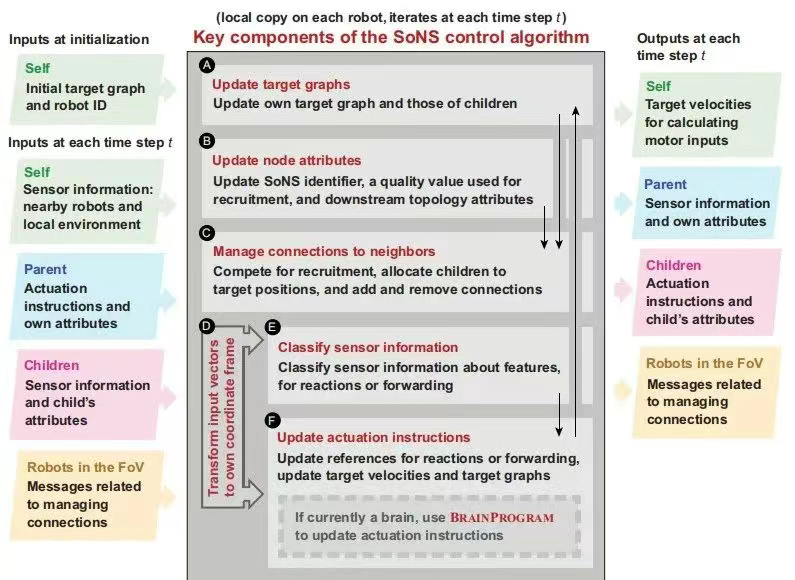
图丨 SoNS 控制算法的关键组成部分(来源:Science Robotics)
该研究的工业应用价值在对比分析中尤为凸显。现有工业级集群系统普遍采用中心化控制架构,即地面控制基站与每架无人机建立直接通信链路。朱炜煦解释说道:“如果无人机数量过多,地面基站就会不堪重负;或者如果地面基站出现问题,整个系统则会瘫痪。”
相比之下,SoNS 框架通过分布式组网技术实现了革命性改进:地面操作人员仅需与集群中的任一节点通信,信息即可通过自组织网络进行可靠传递。
这种架构不仅大幅降低了通信带宽需求,更重要的是实现了真正的去中心化容错——即使部分无人机节点或地面控制基站发生故障,系统仍能维持基本功能。
以当前热门的无人机编队表演为例,实际演出中因通信中断导致的坠机事故屡见不鲜。传统方案需要每架无人机和地面基站之间建立独立通信链路,这不仅造成高昂的基础设施成本,更形成了单点故障风险。
若采用 SoNS 架构,系统只需维持最低限度的基础通信,通过群体智能实现自组织飞行控制。仿真实验表明,即使完全失去地面控制信号,无人机集群仍能基于预设程序和安全协议保持基本队形,这为大规模无人机表演提供了全新的技术范式。
日前,相关论文以《机器人群体的自组织神经系统》(Self-organizing Nervous Systems for Robot Swarms)为题发表在 Science Robotics 上 [1]。
布鲁塞尔自由大学博士生朱炜煦、辛南·奥古兹(Sinan Oğuz)和玛丽·凯瑟琳·海因里希(Mary Katherine Heinrich)博士是共同第一作者,马尔科·多里戈(Marco Dorigo)教授担任通讯作者。
图丨相关论文(来源:Science Robotics)
朱炜煦本科就读于武汉大学第一届弘毅学堂计算机班,并继续在该校完成研究生阶段学习。他从儿时开始就对蚂蚁等昆虫产生浓厚兴趣,这种早期观察为他日后研究群体智能埋下了种子。
初中时期,他在科幻作品中首次接触到“群体智能”的概念,这一启蒙经历促使他在本科和研究生阶段都持续聚焦该领域。在布鲁塞尔自由大学攻读博士学位期间,师从蚁群算法创始人马尔科·多里戈(Marco Dorigo)教授的经历,使他的学术视野得到显著拓展。
博士二年级的一次中期考核成为朱炜煦科研思维转变的关键点。当时,他着重展示了技术实现和工程细节方面的工作,导师的评价“你是一名不错的工程师,但还不是优秀的科学家”促使他深入反思科研方法论。
这次经历对他触动很深,也让他意识到,优秀的科研工作不仅需要解决技术问题,更要站在更开阔的视角去思考其科学意义和领域贡献。
群体智能作为人工智能的重要分支,在朱炜煦看来,其未来有趣的发展方向之一是:在群体中,决策不再由单一个体(如地面站或某架无人机)做出,而是由群体共同组成一个传统意义上的 AI 神经网络来进行决策。这种创新将推动群体智能从集中式控制向真正分布式协同的范式转变。
基于本次成果,研究人员计划在两个方向继续探索:一是构建纯无人机集群系统,消除对地面机器人的依赖,提升系统的空间适应能力;二是增强系统异构性,计划引入具备机械手的移动机器人。这类新型机器人将赋予集群物体操作能力,如搬运箱子等任务,并通过群体智能实现协同控制。
“这些探索不仅将扩展群体机器人的应用场景,也将为分布式智能系统研究提供新的理论和技术突破口。”朱炜煦说道。




![[Godot] C#2D平台游戏基础移动和进阶跳跃代码](https://i-blog.csdnimg.cn/direct/5951af83e0ea4472a16bee492c67dda1.png)