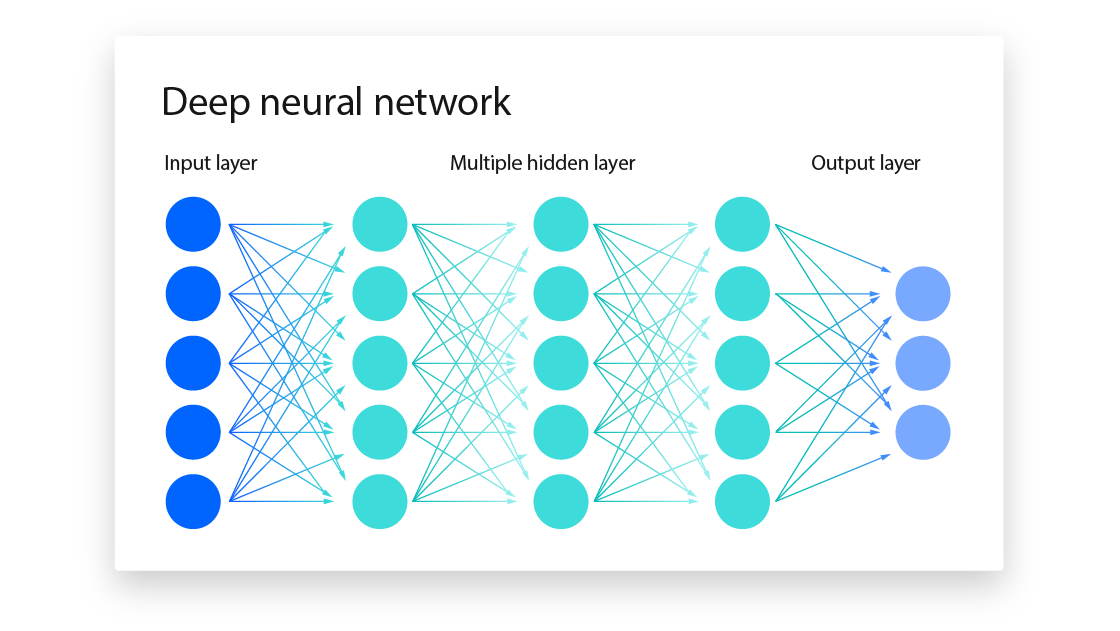
CNN原理
从DNN到CNN
- 卷积层与汇聚
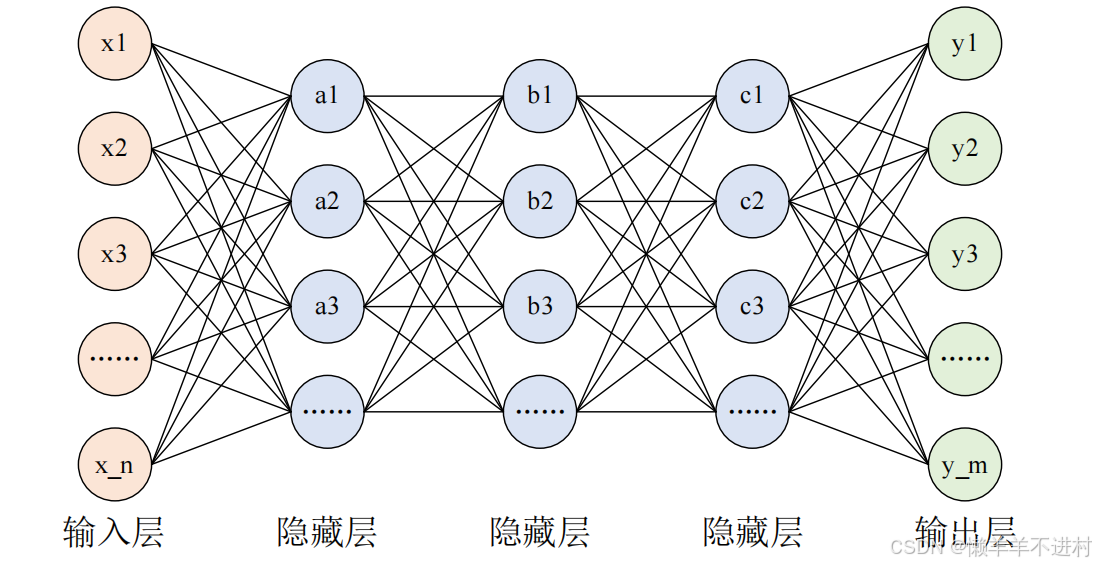
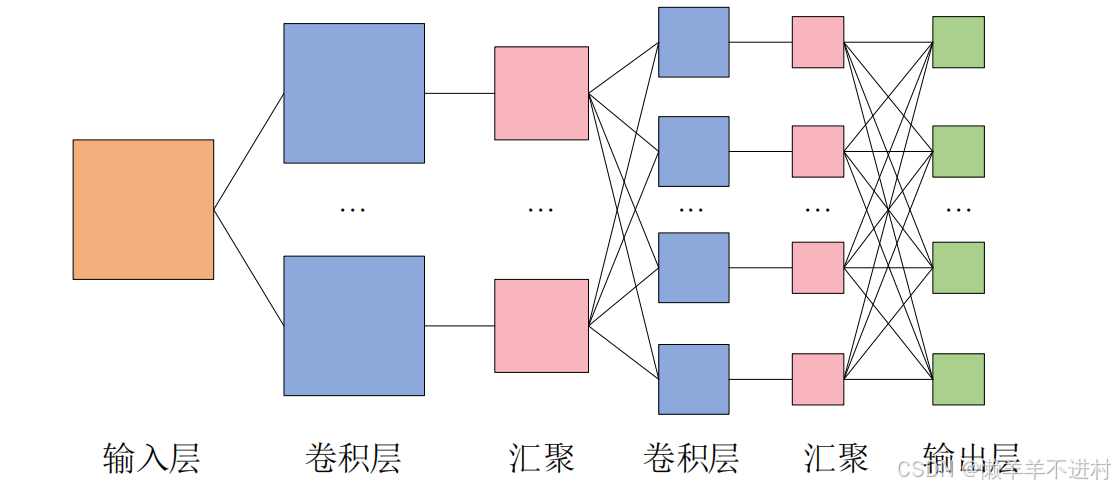
- 深度神经网络DNN中,相邻层的所有神经元之间都有连接,这叫全连接;卷积神经网络 CNN 中,新增了卷积层(Convolution)与汇聚(Pooling)。
- DNN 的全连接层对应 CNN 的卷积层,汇聚是与激活函数类似的附件;单个卷积层的结构是:卷积层-激活函数-(汇聚),其中汇聚可省略。
2.CNN:专攻多维数据
在深度神经网络 DNN 课程的最后一章,使用 DNN 进行了手写数字的识别。但是,图像至少就有二维,向全连接层输入时,需要多维数据拉平为 1 维数据,这样一来,图像的形状就被忽视了,很多特征是隐藏在空间属性里的,如下图所示。
而卷积层可以保持输入数据的维数不变,当输入数据是二维图像时,卷积层会以多维数据的形式接收输入数据,并同样以多维数据的形式输出至下一层,如下图所示。
卷积层
CNN 中的卷积层与 DNN 中的全连接层是平级关系,全连接层中的权重与偏置即y = ω1x1 + ω2x2 + ω3x3 + b中的 ω 与 b,卷积层中的权重与偏置变得稍微复杂。
-
内部参数:权重(卷积核)
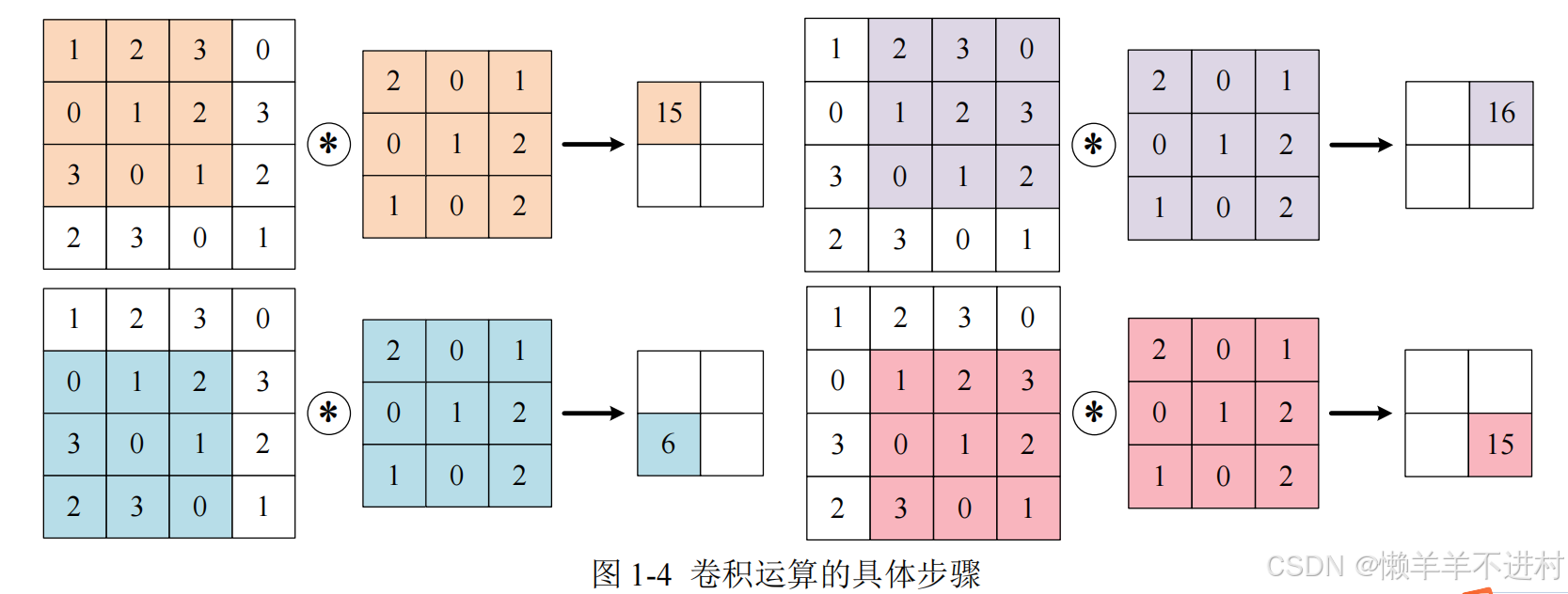
当输入数据进入卷积层后,输入数据会与卷积核进行卷积运算,如下图:

上图中的输入大小是(4,4),卷积核大小事(3,3),输出大小是(2,2)卷积运算的原理是逐元素乘积后再相加。
-
内部参数:偏置
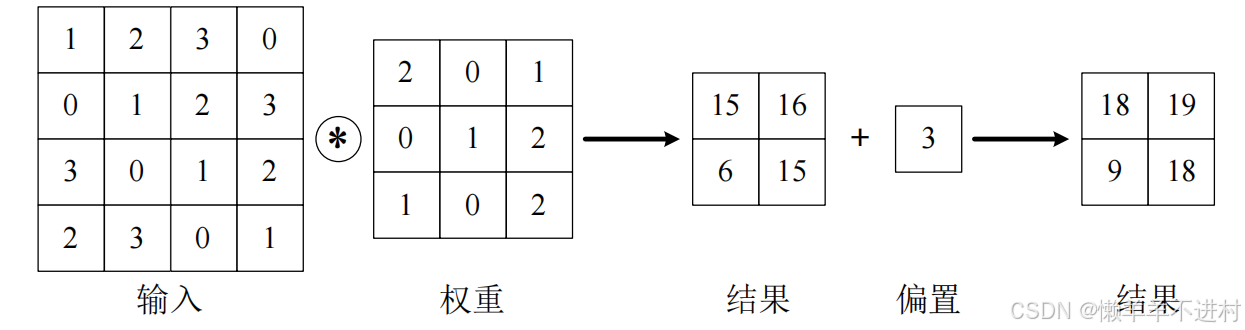
在卷积运算的过程中也存在偏置,如下图所示:
-
外部参数:补充
为了防止经过多个卷积层后图像越卷越小,可以在进行卷积层的处理之前,向输入数据的周围填入固定的数据(比如 0),这称为填充(padding)。
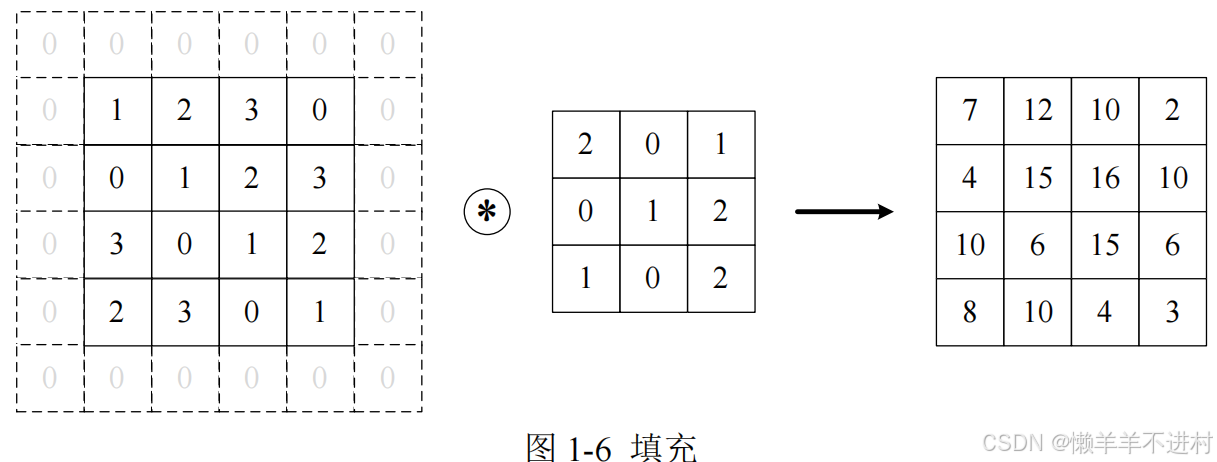
对上图大小为(4, 4)的输入数据应用了幅度为 1 的填充,填充值为 0。 -
外部参数:步幅
使用卷积核的位置间隔被称为步幅(stride),之前的例子中步幅都是 1,如果将步幅设为 2,此时使用卷积核的窗口的间隔变为 2。
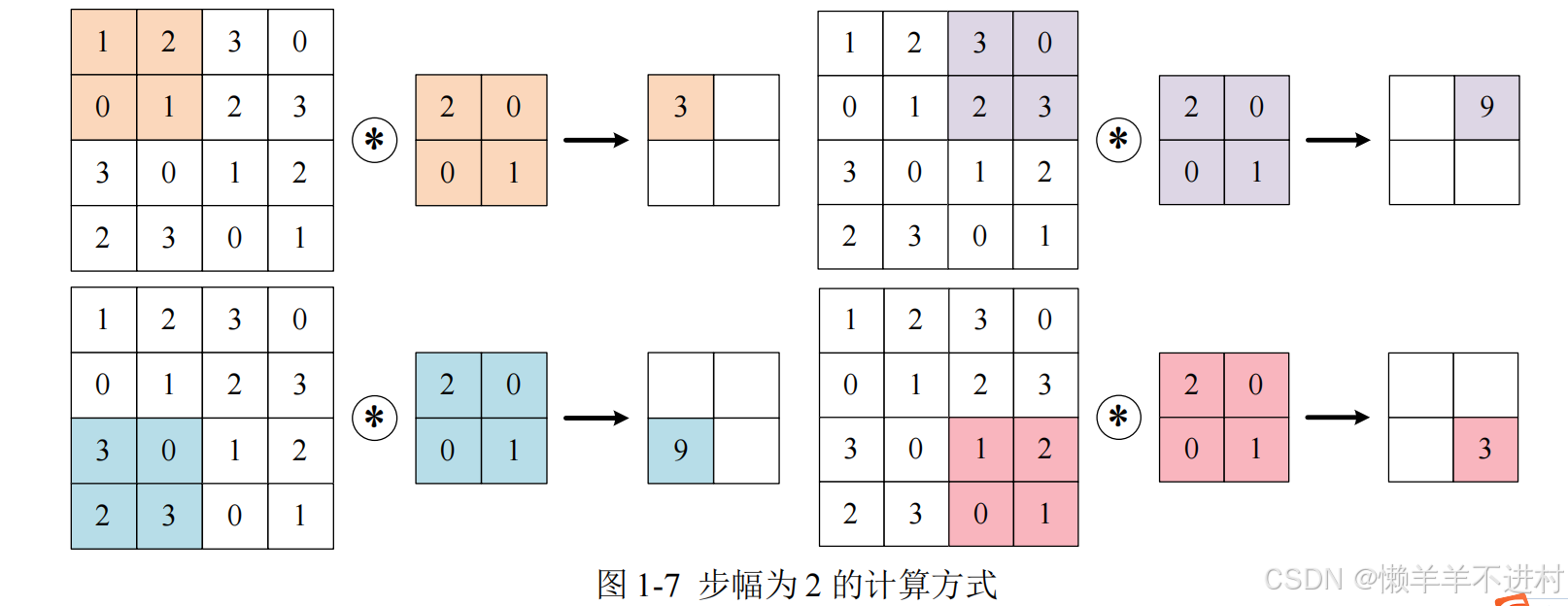
综上,增大填充后,输出尺寸会变大;而增大步幅后,输出尺寸会变小 -
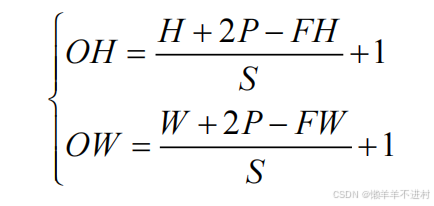
输入与输出尺寸的关系
假设输入尺寸为(H, W),卷积核的尺寸为(FH, FW),填充为 P,步幅为 S。则输出尺寸(OH, OW)的计算公式为
多通道
在上一小节讲的卷积层,仅仅针对二维的输入与输出数据(一般是灰度图像),可称之为单通道。
但是,彩色图像除了高、长两个维度之外,还有第三个维度:通道(channel)。例如,以 RGB 三原色为基础的彩色图像,其通道方向就有红、黄、蓝三部分,可视为 3 个单通道二维图像的混合叠加。一般的,当输入数据是二维时,权重被称为卷积核(Kernel);当输入数据是三维或更高时,权重被称为滤波器(Filter)。
1.多通道输入
对三维数据的卷积操作如图 1-8 所示,输入数据与滤波器的通道数必须要设为相同的值,可以发现,这种情况下的输出结果降级为了二维
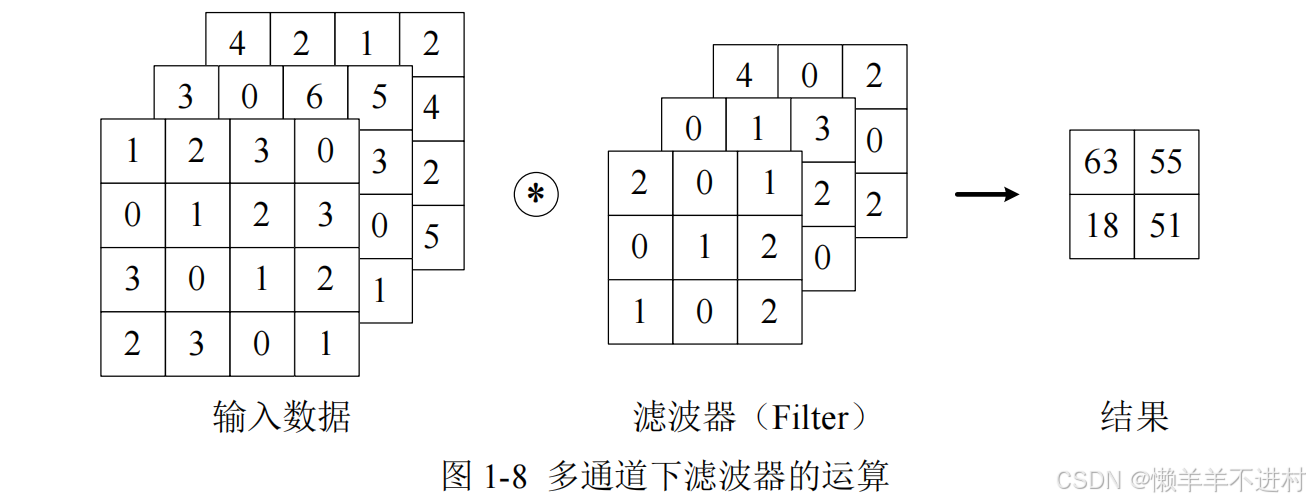
将数据和滤波器看作长方体,如图 1-9 所示

C、H、W 是固定的顺序,通道数要写在高与宽的前面
图 1-9 可看出,仅通过一个卷积层,三维就被降成二维了。大多数时候我们想让三维的特征多经过几个卷积层,因此就需要多通道输出,如图 1-10 所示。
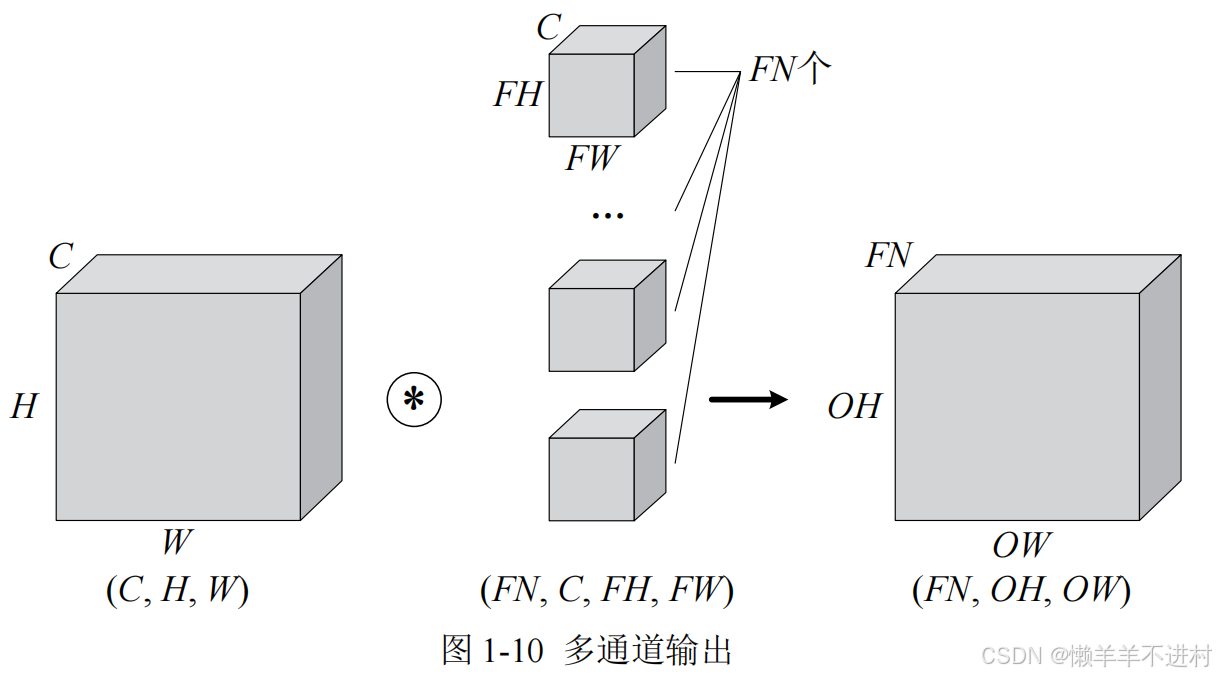
别忘了,卷积运算中存在偏置,如果进一步追加偏置的加法运算处理,则结果如图 1-11 所示,每个通道都有一个单独的偏置。

汇聚(很多教材也叫做池化)
汇聚(Pooling)仅仅是从一定范围内提取一个特征值,所以不存在要学习的内部参数。一般有平均汇聚与最大值汇聚。
-
平均汇聚
一个以步幅为2进行的2*2窗口的平均汇聚,如图1-12所示

-
最大值汇聚
一个以步幅为 2 进行 2*2 窗口的最大值汇聚,如图 1-13 所示
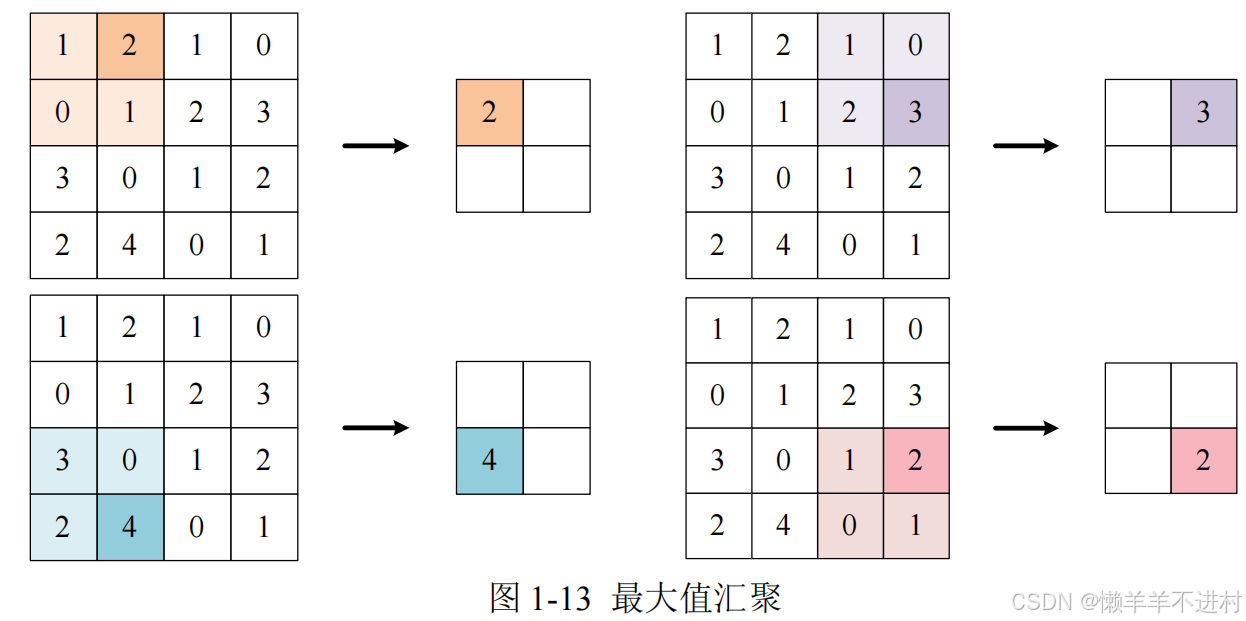
汇聚对图像的高 H 和宽 W 进行特征提取,不改变通道数 C。
尺寸变换总结
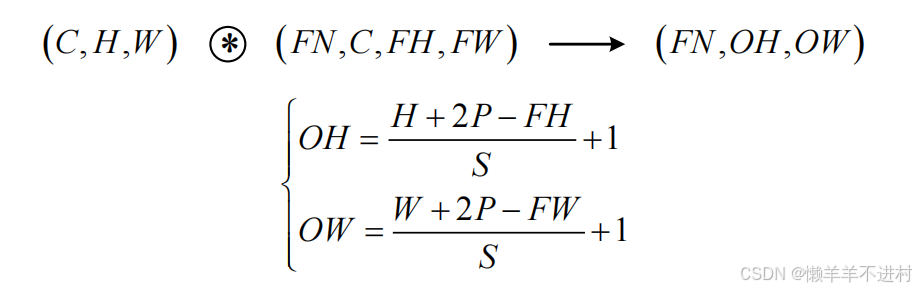
- 卷积层
现假设卷积层的填充为P,步幅为S,由
- 输入数据的尺寸是:( C,H,W) 。
- 滤波器的尺寸是:(FN,C,FH,FW)。
- 输出数据的尺寸是:(FN,OH,OW) 。
可得
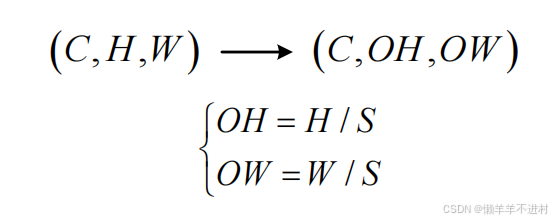
2. 汇聚
现假设汇聚的步幅为 S,由
- 输入数据的尺寸是:( C,H,W) 。
- 输出数据的尺寸是:(C,OH,OW) 。
可得
LeNet-5
网络结构
LeNet-5 虽诞生于 1998 年,但基于它的手写数字识别系统则非常成功。
该网络共 7 层,输入图像尺寸为 28×28,输出则是 10 个神经元,分别表示某手写数字是 0 至 9 的概率。
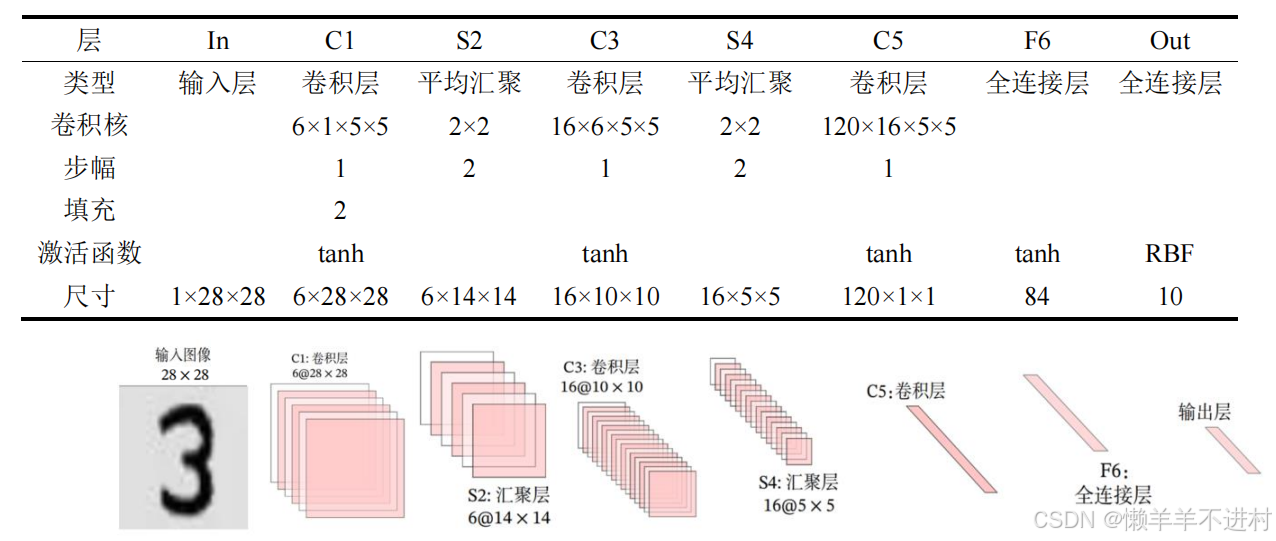
PS:输出层由 10 个径向基函数 RBF 组成,用于归一化最终的结果,目前RBF 已被 Softmax 取代。
根据网络结构,在 PyTorch 的 nn.Sequential 中编写为
self.net = nn.Sequential(
nn.Conv2d(1, 6, kernel_size=5, padding=2), nn.Tanh(), # C1:卷积层
nn.AvgPool2d(kernel_size=2, stride=2), # S2:平均汇聚
nn.Conv2d(6, 16, kernel_size=5), nn.Tanh(), # C3:卷积层
nn.AvgPool2d(kernel_size=2, stride=2), # S4:平均汇聚
nn.Conv2d(16, 120, kernel_size=5), nn.Tanh(), # C5:卷积层
nn.Flatten(), # 把图像铺平成一维
nn.Linear(120, 84), nn.Tanh(), # F5:全连接层
nn.Linear(84, 10) # F6:全连接层
)
其中,nn.Conv2d( )需要四个参数,分别为
- in_channel:此层输入图像的通道数;
- out_channel:此层输出图像的通道数;
- kernel_size:卷积核尺寸;
- padding:填充;
- stride:步幅。
制作数据集
import torch
import torch.nn as nn
from torch.utils.data import DataLoader
from torchvision import transforms
from torchvision import datasets
import matplotlib.pyplot as plt
%matplotlib inline
# 展示高清图
from matplotlib_inline import backend_inline
backend_inline.set_matplotlib_formats('svg')
# 制作数据集
# 数据集转换参数
transform = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize(0.1307, 0.3081)
])
# 下载训练集与测试集
train_Data = datasets.MNIST(
root = 'D:/Jupyter/dataset/mnist/', # 下载路径
train = True, # 是 train 集
download = True, # 如果该路径没有该数据集,就下载
transform = transform # 数据集转换参数
)
test_Data = datasets.MNIST(
root = 'D:/Jupyter/dataset/mnist/', # 下载路径
train = False, # 是 test 集
download = True, # 如果该路径没有该数据集,就下载
transform = transform # 数据集转换参数
)
# 批次加载器
train_loader = DataLoader(train_Data, shuffle=True, batch_size=256)
test_loader = DataLoader(test_Data, shuffle=False, batch_size=256)
搭建神经网络
class CNN(nn.Module):
def __init__(self):
super(CNN,self).__init__()
self.net = nn.Sequential(
nn.Conv2d(1, 6, kernel_size=5, padding=2), nn.Tanh(),
nn.AvgPool2d(kernel_size=2, stride=2),
nn.Conv2d(6, 16, kernel_size=5), nn.Tanh(),
nn.AvgPool2d(kernel_size=2, stride=2),
nn.Conv2d(16, 120, kernel_size=5), nn.Tanh(),
nn.Flatten(),
nn.Linear(120, 84), nn.Tanh(),
nn.Linear(84, 10)
)
def forward(self, x):
y = self.net(x)
return y
# 查看网络结构
X = torch.rand(size= (1, 1, 28, 28))
for layer in CNN().net:
X = layer(X)
print( layer.__class__.__name__, 'output shape: \t', X.shape )

# 创建子类的实例,并搬到 GPU 上
model = CNN().to('cuda:0')
训练网络
# 损失函数的选择
loss_fn = nn.CrossEntropyLoss() # 自带 softmax 激活函数
# 优化算法的选择
learning_rate = 0.9 # 设置学习率
optimizer = torch.optim.SGD(
model.parameters(),
lr = learning_rate,
)
# 训练网络
epochs = 5
losses = [] # 记录损失函数变化的列表
for epoch in range(epochs):
for (x, y) in train_loader: # 获取小批次的 x 与 y
x, y = x.to('cuda:0'), y.to('cuda:0')
Pred = model(x) # 一次前向传播(小批量)
loss = loss_fn(Pred, y) # 计算损失函数
losses.append(loss.item()) # 记录损失函数的变化
optimizer.zero_grad() # 清理上一轮滞留的梯度
loss.backward() # 一次反向传播
optimizer.step() # 优化内部参数
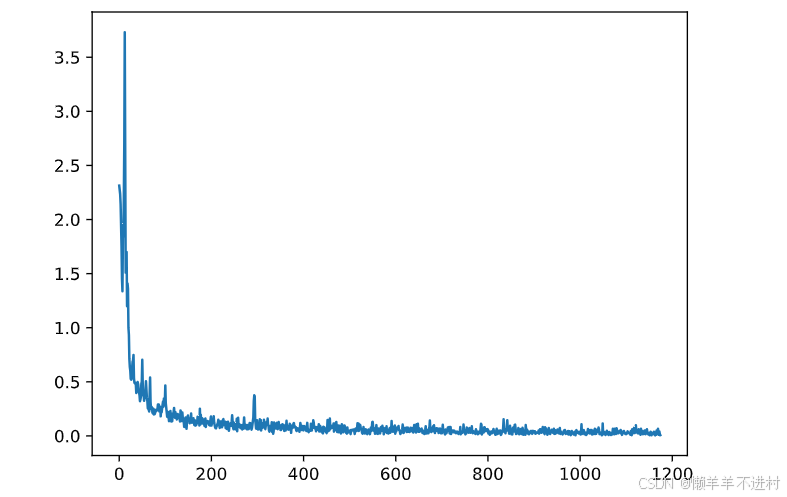
Fig = plt.figure()
plt.plot(range(len(losses)), losses)
plt.show()
测试网络
# 测试网络
correct = 0
total = 0
with torch.no_grad(): # 该局部关闭梯度计算功能
for (x, y) in test_loader: # 获取小批次的 x 与 y
x, y = x.to('cuda:0'), y.to('cuda:0')
Pred = model(x) # 一次前向传播(小批量)
_, predicted = torch.max(Pred.data, dim=1)
correct += torch.sum( (predicted == y) )
total += y.size(0)
print(f'测试集精准度: {100*correct/total} %') #OUT:测试集精准度: 9.569999694824219 %
AlexNet
网络结构
AlexNet 是第一个现代深度卷积网络模型,其首次使用了很多现代网络的技术方法,作为 2012 年 ImageNet 图像分类竞赛冠军,输入为 3×224×224 的图像,输出为 1000 个类别的条件概率。
考虑到如果使用 ImageNet 训练集会导致训练时间过长,这里使用稍低亿档的 1×28×28 的 MNIST 数据集,并手动将其分辨率从 1×28×28 提到 1×224×224,同时输出从 1000 个类别降到 10 个,修改后的网络结构见下表。
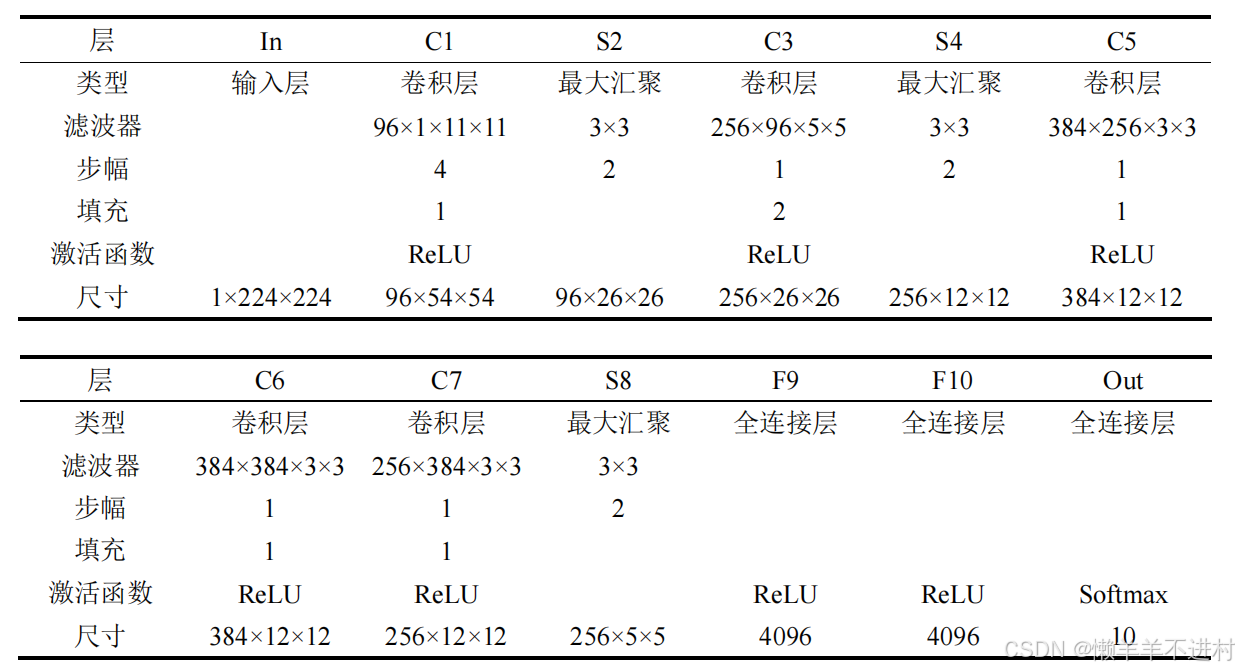
根据网络结构,在 PyTorch 的 nn.Sequential 中编写为
self.net = nn.Sequential(
nn.Conv2d(1, 96, kernel_size=11, stride=4, padding=1), nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2),
nn.Conv2d(96, 256, kernel_size=5, padding=2), nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2),
nn.Conv2d(256, 384, kernel_size=3, padding=1), nn.ReLU(),
nn.Conv2d(384, 384, kernel_size=3, padding=1), nn.ReLU(),
nn.Conv2d(384, 256, kernel_size=3, padding=1), nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2),
nn.Flatten(),
nn.Linear(6400, 4096), nn.ReLU(),
nn.Dropout(p=0.5), # Dropout——随机丢弃权重
nn.Linear(4096, 4096), nn.ReLU(),
nn.Dropout(p=0.5), # 按概率 p 随机丢弃突触
nn.Linear(4096, 10)
)
制作数据集
import torch
import torch.nn as nn
from torch.utils.data import DataLoader
from torchvision import transforms
from torchvision import datasets
import matplotlib.pyplot as plt
%matplotlib inline
# 展示高清图
from matplotlib_inline import backend_inline
backend_inline.set_matplotlib_formats('svg')
# 制作数据集
# 数据集转换参数
transform = transforms.Compose([
transforms.ToTensor(),
transforms.Resize(224),
transforms.Normalize(0.1307, 0.3081)
])
# 下载训练集与测试集
train_Data = datasets.FashionMNIST(
root = 'D:/Jupyter/dataset/mnist/',
train = True,
download = True,
transform = transform
)
test_Data = datasets.FashionMNIST(
root = 'D:/Jupyter/dataset/mnist/',
train = False,
download = True,
transform = transform
)
# 批次加载器
train_loader = DataLoader(train_Data, shuffle=True, batch_size=128)
test_loader = DataLoader(test_Data, shuffle=False, batch_size=128)
搭建神经网络
class CNN(nn.Module):
def __init__(self):
super(CNN,self).__init__()
self.net = nn.Sequential(
nn.Conv2d(1, 96, kernel_size=11, stride=4, padding=1),
nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2),
nn.Conv2d(96, 256, kernel_size=5, padding=2),
nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2),
nn.Conv2d(256, 384, kernel_size=3, padding=1),
nn.ReLU(),
nn.Conv2d(384, 384, kernel_size=3, padding=1),
nn.ReLU(),
nn.Conv2d(384, 256, kernel_size=3, padding=1),
nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2),
nn.Flatten(),
nn.Linear(6400, 4096), nn.ReLU(),
nn.Dropout(p=0.5),
nn.Linear(4096, 4096), nn.ReLU(),
nn.Dropout(p=0.5),
nn.Linear(4096, 10)
)
def forward(self, x):
y = self.net(x)
return y
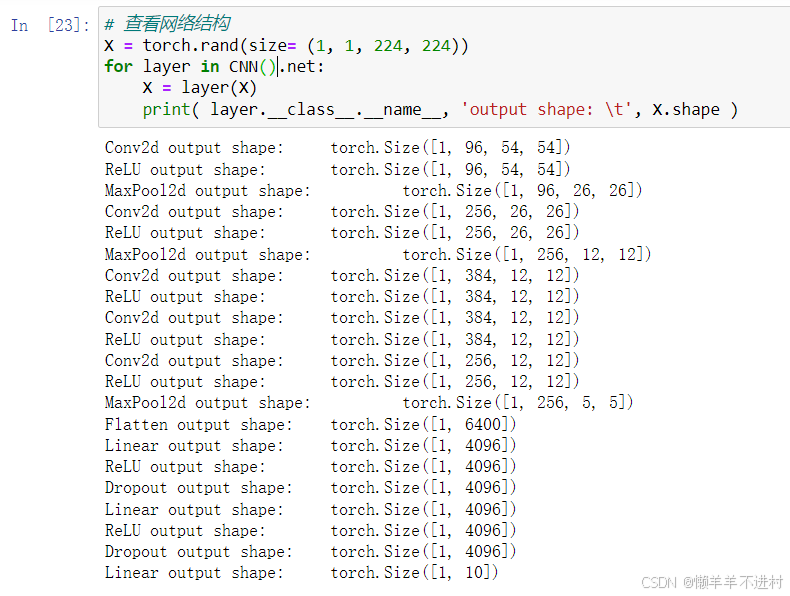
# 查看网络结构
X = torch.rand(size= (1, 1, 224, 224))
for layer in CNN().net:
X = layer(X)
print( layer.__class__.__name__, 'output shape: \t', X.shape )
# 创建子类的实例,并搬到 GPU 上
model = CNN().to('cuda:0')
训练网络
# 损失函数的选择
loss_fn = nn.CrossEntropyLoss() # 自带 softmax 激活函数
# 优化算法的选择
learning_rate = 0.1 # 设置学习率
optimizer = torch.optim.SGD(
model.parameters(),
lr = learning_rate,
)
# 训练网络
epochs = 10
losses = [] # 记录损失函数变化的列表
for epoch in range(epochs):
for (x, y) in train_loader: # 获取小批次的 x 与 y
x, y = x.to('cuda:0'), y.to('cuda:0')
Pred = model(x) # 一次前向传播(小批量)
loss = loss_fn(Pred, y) # 计算损失函数
losses.append(loss.item()) # 记录损失函数的变化
optimizer.zero_grad() # 清理上一轮滞留的梯度
loss.backward() # 一次反向传播
optimizer.step() # 优化内部参数
Fig = plt.figure()
plt.plot(range(len(losses)), losses)
plt.show()
测试网络
# 测试网络
correct = 0
total = 0
with torch.no_grad(): # 该局部关闭梯度计算功能
for (x, y) in test_loader: # 获取小批次的 x 与 y
x, y = x.to('cuda:0'), y.to('cuda:0')
Pred = model(x) # 一次前向传播(小批量)
_, predicted = torch.max(Pred.data, dim=1)
correct += torch.sum( (predicted == y) )
total += y.size(0)
print(f'测试集精准度: {100*correct/total} %')
GoogLeNet
网络结构
2014 年,获得 ImageNet 图像分类竞赛的冠军是 GoogLeNet,其解决了一个重要问题:滤波器超参数选择困难,如何能够自动找到最佳的情况。
其在网络中引入了一个小网络——Inception 块,由 4 条并行路径组成,4 条路径互不干扰。这样一来,超参数最好的分支的那条分支,其权重会在训练过程中不断增加,这就类似于帮我们挑选最佳的超参数,如示例所示。
# 一个 Inception 块
class Inception(nn.Module):
def __init__(self, in_channels):
super(Inception, self).__init__()
self.branch1 = nn.Conv2d(in_channels, 16, kernel_size=1)
self.branch2 = nn.Sequential(
nn.Conv2d(in_channels, 16, kernel_size=1),
nn.Conv2d(16, 24, kernel_size=3, padding=1),
nn.Conv2d(24, 24, kernel_size=3, padding=1)
)
self.branch3 = nn.Sequential(
nn.Conv2d(in_channels, 16, kernel_size=1),
nn.Conv2d(16, 24, kernel_size=5, padding=2)
)
self.branch4 = nn.Conv2d(in_channels, 24, kernel_size=1)
def forward(self, x):
branch1 = self.branch1(x)
branch2 = self.branch2(x)
branch3 = self.branch3(x)
branch4 = self.branch4(x)
outputs = [branch1, branch2, branch3, branch4]
return torch.cat(outputs, 1)
此外,分支 2 和分支 3 上增加了额外 1×1 的滤波器,这是为了减少通道数,降低模型复杂度。
GoogLeNet 之所以叫 GoogLeNet,是为了向 LeNet 致敬,其网络结构为
class CNN(nn.Module):
def __init__(self):
super(CNN, self).__init__()
self.net = nn.Sequential(
nn.Conv2d(1, 10, kernel_size=5), nn.ReLU(),
nn.MaxPool2d(kernel_size=2, stride=2),
Inception(in_channels=10),
nn.Conv2d(88, 20, kernel_size=5), nn.ReLU(),
nn.MaxPool2d(kernel_size=2, stride=2),
Inception(in_channels=20),
nn.Flatten(),
nn.Linear(1408, 10)
)
def forward(self, x):
y = self.net(x)
return y
制作数据集
import torch
import torch.nn as nn
from torch.utils.data import DataLoader
from torchvision import transforms
from torchvision import datasets
import matplotlib.pyplot as plt
%matplotlib inline
# 展示高清图
from matplotlib_inline import backend_inline
backend_inline.set_matplotlib_formats('svg')
# 制作数据集
# 数据集转换参数
transform = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize(0.1307, 0.3081)
])
# 下载训练集与测试集
train_Data = datasets.FashionMNIST(
root = 'D:/Jupyter/dataset/mnist/',
train = True,
download = True,
transform = transform
)
test_Data = datasets.FashionMNIST(
root = 'D:/Jupyter/dataset/mnist/',
train = False,
download = True,
transform = transform
)
# 批次加载器
train_loader = DataLoader(train_Data, shuffle=True, batch_size=128)
test_loader = DataLoader(test_Data, shuffle=False, batch_size=128)
搭建神经网络
# 一个 Inception 块
class Inception(nn.Module):
def __init__(self, in_channels):
super(Inception, self).__init__()
self.branch1 = nn.Conv2d(in_channels, 16, kernel_size=1)
self.branch2 = nn.Sequential(
nn.Conv2d(in_channels, 16, kernel_size=1),
nn.Conv2d(16, 24, kernel_size=3, padding=1),
nn.Conv2d(24, 24, kernel_size=3, padding=1)
)
self.branch3 = nn.Sequential(
nn.Conv2d(in_channels, 16, kernel_size=1),
nn.Conv2d(16, 24, kernel_size=5, padding=2)
)
self.branch4 = nn.Conv2d(in_channels, 24, kernel_size=1)
def forward(self, x):
branch1 = self.branch1(x)
branch2 = self.branch2(x)
branch3 = self.branch3(x)
branch4 = self.branch4(x)
outputs = [branch1, branch2, branch3, branch4]
return torch.cat(outputs, 1)
class CNN(nn.Module):
def __init__(self):
super(CNN, self).__init__()
self.net = nn.Sequential(
nn.Conv2d(1, 10, kernel_size=5), nn.ReLU(),
nn.MaxPool2d(kernel_size=2, stride=2),
Inception(in_channels=10),
nn.Conv2d(88, 20, kernel_size=5), nn.ReLU(),
nn.MaxPool2d(kernel_size=2, stride=2),
Inception(in_channels=20),
nn.Flatten(),
nn.Linear(1408, 10)
)
def forward(self, x):
y = self.net(x)
return y
# 查看网络结构
X = torch.rand(size= (1, 1, 28, 28))
for layer in CNN().net:
X = layer(X)
print( layer.__class__.__name__, 'output shape: \t', X.shape )
# 创建子类的实例,并搬到 GPU 上
model = CNN().to('cuda:0')
训练网络
# 损失函数的选择
loss_fn = nn.CrossEntropyLoss()
# 优化算法的选择
learning_rate = 0.1 # 设置学习率
optimizer = torch.optim.SGD(
model.parameters(),
lr = learning_rate,
)
# 训练网络
epochs = 10
losses = [] # 记录损失函数变化的列表
for epoch in range(epochs):
for (x, y) in train_loader: # 获取小批次的 x 与 y
x, y = x.to('cuda:0'), y.to('cuda:0')
Pred = model(x) # 一次前向传播(小批量)
loss = loss_fn(Pred, y) # 计算损失函数
losses.append(loss.item()) # 记录损失函数的变化
optimizer.zero_grad() # 清理上一轮滞留的梯度
loss.backward() # 一次反向传播
optimizer.step() # 优化内部参数
Fig = plt.figure()
plt.plot(range(len(losses)), losses)
plt.show()
测试网络
# 测试网络
correct = 0
total = 0
with torch.no_grad(): # 该局部关闭梯度计算功能
for (x, y) in test_loader: # 获取小批次的 x 与 y
x, y = x.to('cuda:0'), y.to('cuda:0')
Pred = model(x) # 一次前向传播(小批量)
_, predicted = torch.max(Pred.data, dim=1)
correct += torch.sum( (predicted == y) )
total += y.size(0)
print(f'测试集精准度: {100*correct/total} %')
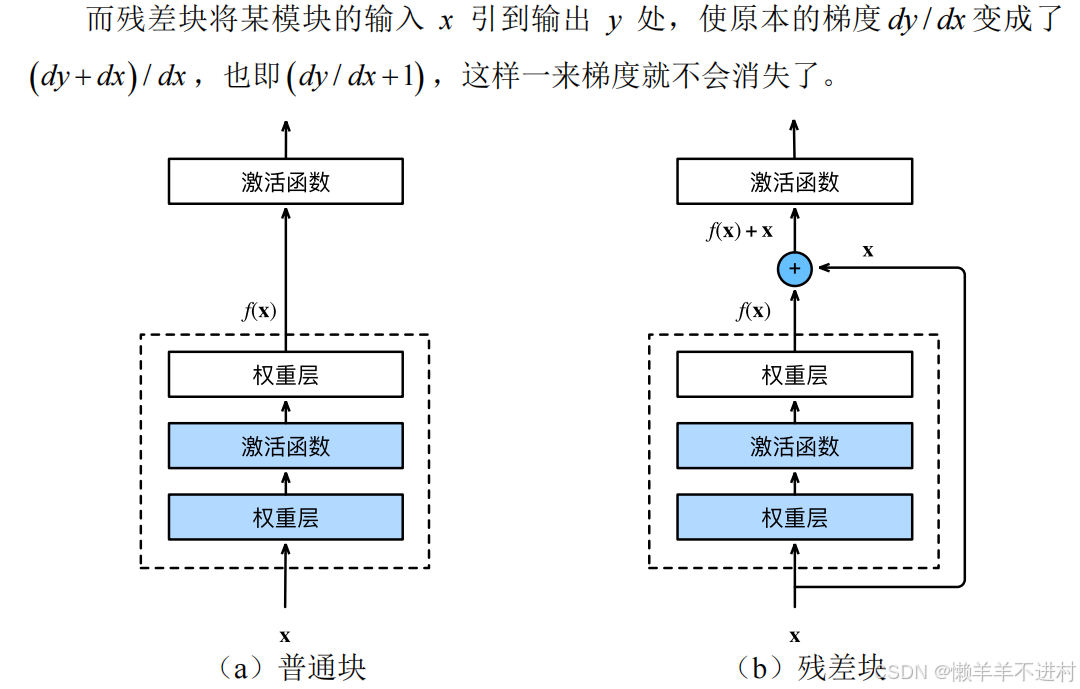
ResNet
网络结构
残差网络(Residual Network,ResNet)荣获 2015 年的 ImageNet 图像分类竞赛冠军,其可以缓解深度神经网络中增加深度带来的“梯度消失”问题。
在反向传播计算梯度时,梯度是不断相乘的,假如训练到后期,各层的梯度均小于 1,则其相乘起来就会不断趋于 0。因此,深度学习的隐藏层并非越多越好,隐藏层越深,梯度越趋于 0,此之谓“梯度消失”。
制作数据集
import torch
import torch.nn as nn
from torch.utils.data import DataLoader
from torchvision import transforms
from torchvision import datasets
import matplotlib.pyplot as plt
%matplotlib inline
# 展示高清图
from matplotlib_inline import backend_inline
backend_inline.set_matplotlib_formats('svg')
# 制作数据集
# 数据集转换参数
transform = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize(0.1307, 0.3081)
])
# 下载训练集与测试集
train_Data = datasets.FashionMNIST(
root = 'D:/Jupyter/dataset/mnist/',
train = True,
download = True,
transform = transform
)
test_Data = datasets.FashionMNIST(
root = 'D:/Jupyter/dataset/mnist/',
train = False,
download = True,
transform = transform
)
# 批次加载器
train_loader = DataLoader(train_Data, shuffle=True, batch_size=128)
test_loader = DataLoader(test_Data, shuffle=False, batch_size=128)
搭建神经网络
# 残差块
class ResidualBlock(nn.Module):
def __init__(self, channels):
super(ResidualBlock, self).__init__()
self.net = nn.Sequential(
nn.Conv2d(channels, channels, kernel_size=3, padding=1),
nn.ReLU(),
nn.Conv2d(channels, channels, kernel_size=3, padding=1),
)
def forward(self, x):
y = self.net(x)
return nn.functional.relu(x+y)
class CNN(nn.Module):
def __init__(self):
super(CNN, self).__init__()
self.net = nn.Sequential(
nn.Conv2d(1, 16, kernel_size=5), nn.ReLU(),
nn.MaxPool2d(2), ResidualBlock(16),
nn.Conv2d(16, 32, kernel_size=5), nn.ReLU(),
nn.MaxPool2d(2), ResidualBlock(32),
nn.Flatten(),
nn.Linear(512, 10)
)
def forward(self, x):
y = self.net(x)
return y
# 查看网络结构
X = torch.rand(size= (1, 1, 28, 28))
for layer in CNN().net:
X = layer(X)
print( layer.__class__.__name__, 'output shape: \t', X.shape )
# 创建子类的实例,并搬到 GPU 上
model = CNN().to('cuda:0')
训练网络
# 损失函数的选择
loss_fn = nn.CrossEntropyLoss()
# 优化算法的选择
learning_rate = 0.1 # 设置学习率
optimizer = torch.optim.SGD(
model.parameters(),
lr = learning_rate,
)
# 训练网络
epochs = 10
losses = [] # 记录损失函数变化的列表
for epoch in range(epochs):
for (x, y) in train_loader: # 获取小批次的 x 与 y
x, y = x.to('cuda:0'), y.to('cuda:0')
Pred = model(x) # 一次前向传播(小批量)
loss = loss_fn(Pred, y) # 计算损失函数
losses.append(loss.item()) # 记录损失函数的变化
optimizer.zero_grad() # 清理上一轮滞留的梯度
loss.backward() # 一次反向传播
optimizer.step() # 优化内部参数
Fig = plt.figure()
plt.plot(range(len(losses)), losses)
plt.show()
测试网络
# 测试网络
correct = 0
total = 0
with torch.no_grad(): # 该局部关闭梯度计算功能
for (x, y) in test_loader: # 获取小批次的 x 与 y
x, y = x.to('cuda:0'), y.to('cuda:0')
Pred = model(x) # 一次前向传播(小批量)
_, predicted = torch.max(Pred.data, dim=1)
correct += torch.sum( (predicted == y) )
total += y.size(0)
print(f'测试集精准度: {100*correct/total} %')

![第一期:[特殊字符] 深入理解MyBatis[特殊字符]从JDBC到MyBatis——持久层开发的转折点[特殊字符]](https://i-blog.csdnimg.cn/direct/d3f8e219c42d4546a1e65476c8549e97.jpeg)