目前工业相机有多种分类方式,以下是基于不同原理和特点的类别总结:
- 按维度分类
-
2D相机:
- 原理:通过镜头将二维平面上的物体成像在图像传感器上,传感器上的像素点阵列捕捉物体的光信号,并转换为电信号或数字信号,最终形成二维图像。
- 应用:广泛应用于工业生产中的外观检测、尺寸测量、字符识别、定位等领域。例如,在电子制造行业,用于检测电路板上的元件是否缺失、焊接是否良好;在印刷行业,检测印刷品的图案、文字是否清晰,有无瑕疵。
-
3D相机:
- 原理:通过tof相机,结构光相机、激光三角测量、双目立体视觉等技术,获取物体的三维信息。以结构光为例,相机投射特定的结构光图案到物体表面,根据图案在物体上的变形来计算物体的深度信息。
-
应用:在工业自动化中,常用于机器人的引导和抓取,让机器人能准确地定位和操作物体;在汽车制造中,对车身的三维尺寸进行检测和精度控制;在物流行业,用于货物的体积测量和分拣。
-
- 按扫描方式分类
- 线扫相机:
- 原理:其图像传感器的感光元素呈线状排列,每次采集只能获取一条线的图像信息。为了得到完整的二维图像,需要物体或相机进行匀速直线运动,使线阵相机逐行扫描,拼接成完整的图像。
- 应用:适用于检测连续运动的物体,如在造纸、纺织、印刷等行业,对高速运动的卷材、纸张、织物等进行表面缺陷检测;在交通领域,用于拍摄高速公路上的车辆,获取车辆的外形和牌照等信息。
- 面扫相机:
- 原理:以面为单位进行图像采集,图像传感器上的像素点呈二维阵列分布,可一次性获取整个视场的二维图像信息。
- 应用:用于对物体进行快速成像和检测,如在食品包装行业,检测包装外观是否完好、标签是否贴正;在电子芯片制造中,对芯片进行外观检测和尺寸测量。
- 线扫相机:
- 按芯片类型分类
- CCD相机:集光电转换及电荷存贮、电荷转移、信号读取于一体。它以电荷作为信号,通过光电转换形成电荷包,在驱动脉冲作用下转移、放大输出图像信号。具有图像质量高、抗噪能力强等优点,但成本较高、功耗较大。
- CMOS相机:将光敏元阵列、图像信号放大器、信号读取电路、模数转换电路、图像信号处理器及控制器集成在一块芯片上,具有良好的集成性、低功耗、高速传输和宽动态范围等特点,在高分辨率和高速场合应用广泛,且性价比高。
- 按输出图像颜色分类
-
黑白相机:当光线照射到感光芯片时,光子信号转换成电子信号,通过统计电子数目形成反映光线强弱的黑白图像,光的颜色信息未被保留。在对图像颜色要求不高,注重细节和灰度信息的场合应用广泛,如金属表面裂纹检测、零件尺寸测量等,相同分辨率下,其精度高于彩色相机。
-
彩色相机:通过在感光芯片上添加彩色滤镜或采用分光棱镜等方式,将光线分成不同的颜色分量,如RGB三原色,然后分别进行感光和处理,最终输出彩色图像。适用于对颜色信息有要求的场合,如在印刷品检测中,检测颜色是否准确、有无偏色;在食品检测中,根据颜色判断食品的成熟度和品质。
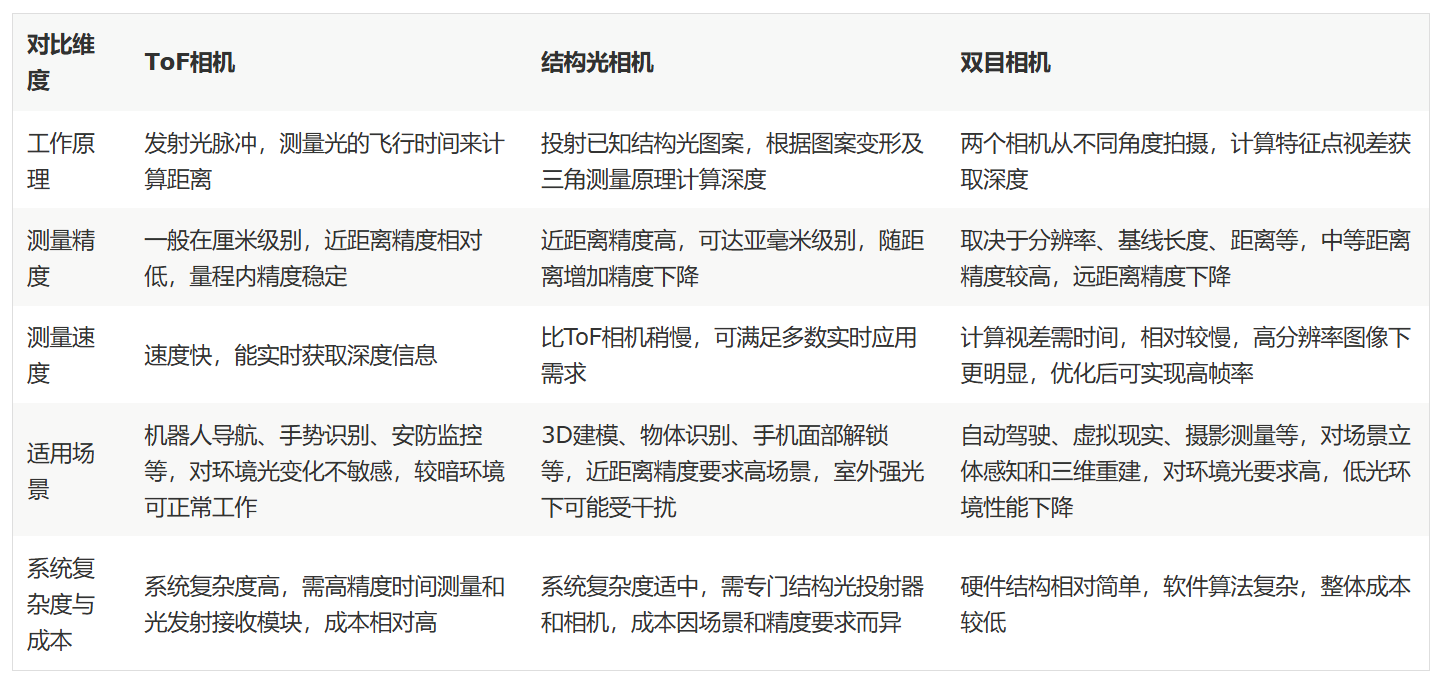
其中对于3d相机,下面进行如下比较总结
-







![[Windows] 字体渲染 mactype v2025.4.11](https://i-blog.csdnimg.cn/direct/555f649eb21a4dbcad80d2e0939ed2b3.png)