目录
一.VMware的安装
二.Ubuntu下载
1.前言
2.Ubuntu版本选择
三.VMware中Ubuntu的安装
四.Ubuntu系统基本设置
1.中文更改
2.中文输入法更改
3. 辅助工具 vmware tools
五.VScode的安装+ros基本插件
1.安装
2.ros辅助插件下载
六.ROS安装
1.安装ros
2.配置ROS环境变量
3.ROS经典案例乌龟教程
(1)启动ros
(2)启动图形端
(3)启动控制端
七.VScode集成ros
1.插件准备
2.项目创建
(1)工作空间创建
(2)环境配置
1.编译
2.前置准备
3.运行
(1)官方版运行方法
(2)vscode内部命令
(3)最终结果
八.常见问题解决
1.未启动ros就运行
2.ros路径报错
一.VMware的安装
这个比较简单去官网下载对应版本的正版VMware Workstation,然后去百度对应版本的密钥激活即可,如果有不会的可以去搜索其他博主的博客看看,这里不再赘述。
二.Ubuntu下载
1.前言
首先先确定你要下载ROS1还是ROS2,然后确定下载哪个版本,毕竟ROS2有jazzy,Rolling,Humble 等等版本,ROS1目前还在支持的版本就是Noetic(推荐使用)。
我来解释下为什么先选择ros版本,因为Ubuntu版本和ros版本息息相关,简单来说就是有一个版本对应关系,比如目前最新的Ubuntu24.04支持ROS2的jazzy等版本,而Ubuntu20.04支持ROS1的Noetic还有ROS2的foxy,galactic,rolling,noetic等版本,所以先确定版本是很有必要的。版本不对应可能会出现些许奇奇怪怪的问题。
2.Ubuntu版本选择
这里我以ROS1的noetic为例
(1)去Ubuntu官网 20.04版本的Ubuntu 到达后如下图所示,

(2)下载完后是一个iso格式的映像文件,也是待会在虚拟机中安装Ubuntu所要的iso文件。
三.VMware中Ubuntu的安装
我的是VMware16PRO
按下图的步骤来即可,点击创建新的虚拟机

选择推荐,(如果知道自定义选项具体干什么的也可以选择第二个自己调整)


这个自己填写即可,密码尽量别太难记,别忘了就行。

这个安装路径尽量别在C盘,改成其他盘,如果C盘很大请忽略。

分配的大小看自己配置尽量多分配点

选择自定义硬件

这东西不同配置都不一样,根据配置来填,尽可能分配多一点,不然会很卡。

然后出现以下几个阶段,等待即可,可能会比较漫长。


中间会出现一些登录等设置,点右上角skip即可(桌面上有两个是我测试用的,初次安装没有)

四.Ubuntu系统基本设置
1.中文更改
按图示步骤



中间出现选项就选install

找到简体中文,点击apply


然后回到



然后就是中文了

2.中文输入法更改



然后点击添加即可。
作者:在Ubuntu24.04中默认有中文,无需下载。
3. 辅助工具 vmware tools
这个可以让虚拟机与外界数据交换,就是可以自由复制粘贴(指的是虚拟机内与自己的电脑之间),这个版本的Ubuntu自带 vmware tools。如果是没有自带的Ubuntu版本,请自行通过命令下载
sudo apt-get autoremove open-vm-tools
sudo apt-get install open-vm-tools-desktop
sudo reboot // 重启电脑五.VScode的安装+ros基本插件
1.安装
找到应用商店并打开,也可浏览器搜VScode官网下载。



2.ros辅助插件下载
中文不会换的看我的另一篇博客 vscode汉化
一些辅助插件自行下载

六.ROS安装
1.安装ros
这里照顾新手,则使用鱼香ROS大佬部署的工具安装,新手也能轻松安装。
打开一个新终端输入(注意liunx粘贴是CTRL+SHIFT+V,复制是CTRL+SHIFT+C),回车
wget http://fishros.com/install -O fishros && . fishros输入密码后出现下面的界面

选择第一个,即输入1


然后再输入1,再输入2

然后等待更换源
选择你要安装的版本,这里Ubuntu的版本不同,ROS的版本也不同。

推荐选noetic,然后选择桌面版

然后等待即可。出现下面即为安装成功!!!

2.配置ROS环境变量
再次打开新终端,输入
wget http://fishros.com/install -O fishros && . fishros
选择4,等待环境配置完毕。

该工具还有其他功能,可自行探索。
3.ROS经典案例乌龟教程
(1)启动ros
roscore
(2)启动图形端
打开一个新终端(ctrl+shift+t),输入
rosrun turtlesim turtlesim_node然后小乌龟就出来了

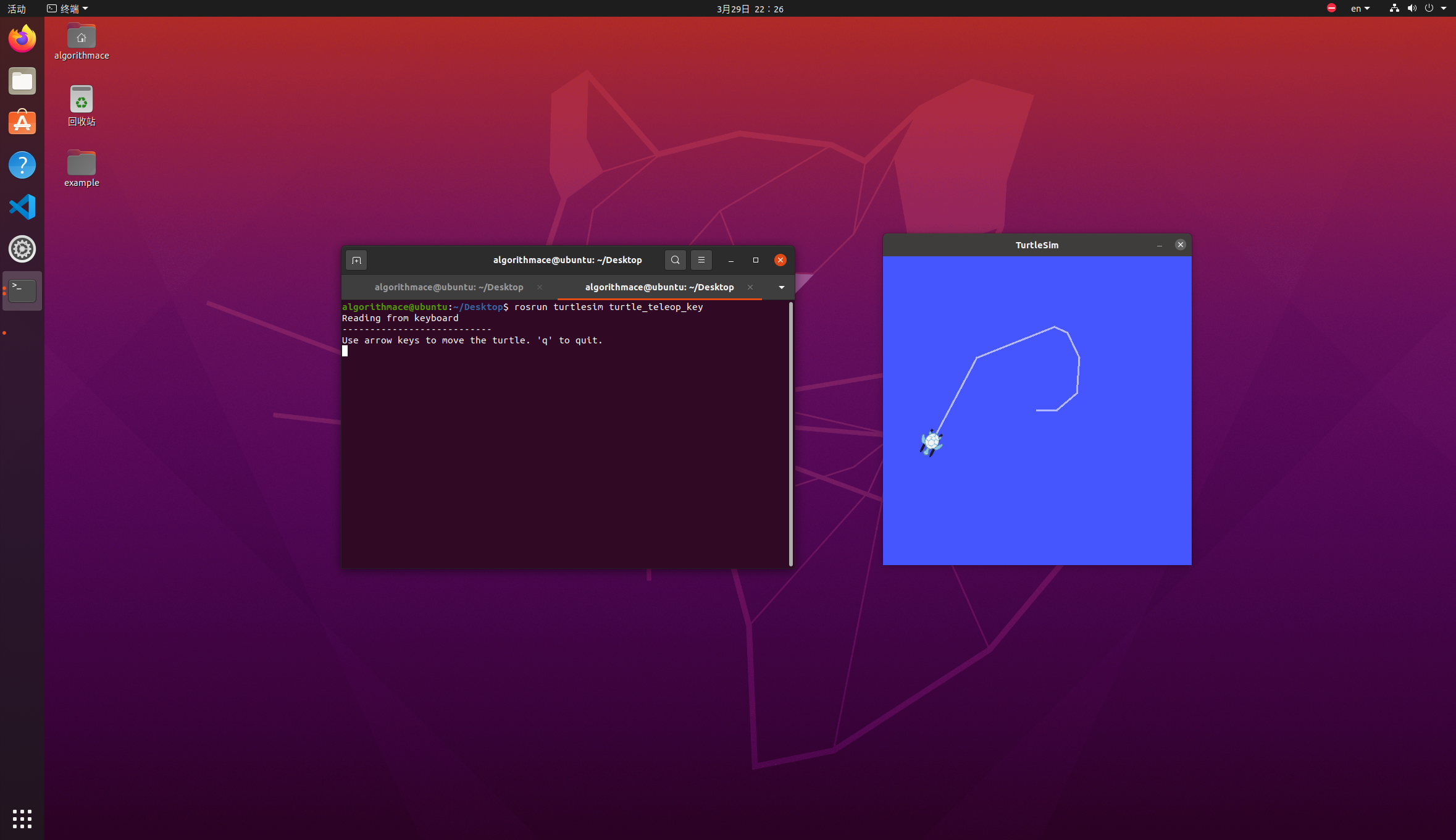
(3)启动控制端
再打开一个新终端,输入
rosrun turtlesim turtle_teleop_key焦点必须在该终端内,按小键盘的上下左右即可控制乌龟(乌龟样貌随机),碰到边缘会有小彩蛋。

七.VScode集成ros
1.插件准备
前面说过了,这里再提一下

2.项目创建
(1)工作空间创建
新建一个任意名称的父级文件夹,里面包含一个名为src(必须是src)。

然后把父级文件夹在终端中打开,输入
catkin_make等待即可

(2)环境配置
在vscode内打开。在刚才的终端输入
code .
即可快捷打开VS code,也可先打开vscode,再打开文件夹。
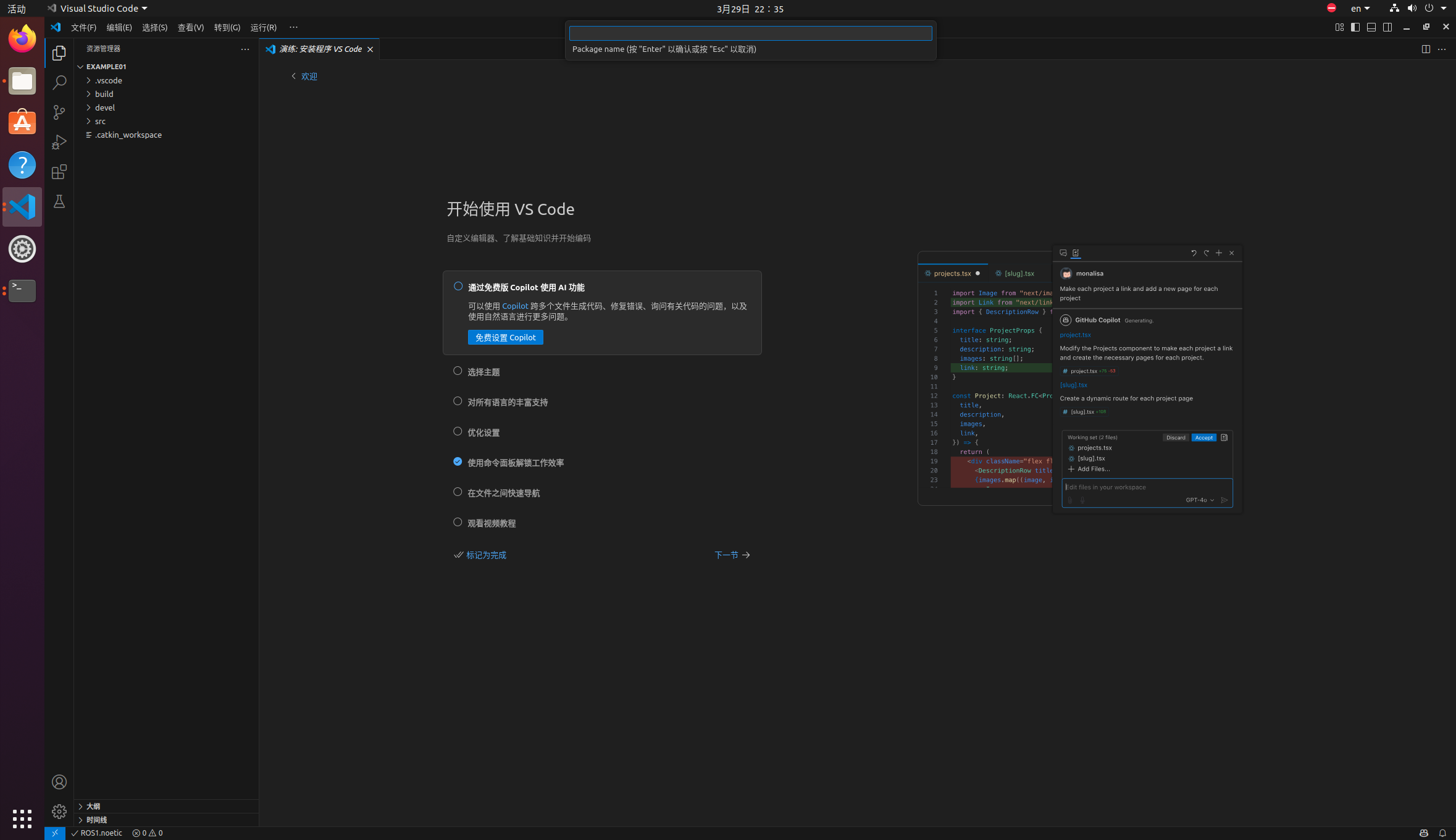
(2)创建功能包
右键src文件夹,点击红框所示

上方框内会让你输入功能包名,任意即可。
然后会让你选择依赖,常用的就是roscpp rospy std_msgs,这里使用cpp演示,所以我输入roscpp。

会出现下图的目录结构

右键.vscode文件夹,新建一个tasks.json文件
记得把注释删掉,不然会报错,这里只是放不下,注释换行了。
{
// 有关 tasks.json 格式的文档,请参见
// https://go.microsoft.com/fwlink/?LinkId=733558
"version": "2.0.0",
"tasks": [
{
"label": "catkin_make:debug", //代表提示的描述性信息
"type": "shell", //可以选择 shell 或者 process,如果是 shell 代码是在
shell 里面运行一个命令,如果是 process 代表作为一个进程来运行
"command": "catkin_make",//这个是我们需要运行的命令
"args": [],//如果需要在命令后面加一些后缀,可以写在这里,比如-DCATKIN_WHITELIST_PACKAGES=“pac1;pac2”
"group": {"kind":"build","isDefault":true},
"presentation": {
"reveal": "always"//可选 always 或者 silence,代表是否输出信息
},
"problemMatcher": "$msCompile"
}
]
}在src文件夹下新建一个helloworld.cpp文件用来测试,内容为
/*
控制台输出 HelloVSCode !!!
*/
#include "ros/ros.h"
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
//执行节点初始化
ros::init(argc,argv,"HelloVSCode");
//输出日志
ROS_INFO("Hello VSCode!!! ");
return 0;
}在CMakeLists.txt中加入
//137 行
add_executable(helloworld
src/helloworld.cpp
)
//152 行
target_link_libraries(helloworld
${catkin_LIBRARIES}
)
(3)编译和运行
1.编译
ctrl+shift+b进行编译,这种方法会将可执行文件生成在devel。

2.前置准备
运行程序我们需要打开一个ROS MASTER。
(1)第一种方法
打开一个新终端输入roscore即可,如下:
roscore
vscode里面可以执行直接执行指令,代替了第一种方法,不需要来会反复切换终端,减少了麻烦。
执行快捷键ctrl + shfit + p输入ROS:Start,即可打开ROS MASTER,如果想要关闭,执行ROS:Stop即可。
3.运行
(1)官方版运行方法
打开一个新终端输入rosrun 包名 节点名称即可,如下:
在这里我的包名helloworld,节点名称helloworld
rosrun helloworld helloworld
(2)vscode内部命令
执行快捷键ctrl + shfit + p输入ROS:Run a Ros executable,代替了在终端调用rosrun helloworld helloworld指令的操作,依次输入你创建的功能包的名称以及节点名称(即编译成功后二进制文件的名称)
参考至https://blog.csdn.net/g944468183/article/details/123759886?spm=1001.2014.3001.5506



然后回车等待即可。
(3)最终结果

到此如果没有问题那么ros安装完成。
八.常见问题解决
1.未启动ros就运行
报错代码
[ERROR] [1743315426.567311745]: [registerPublisher] Failed to contact master at [localhost:11311]. Retrying...
解决办法
在终端输入roscore启动ros
roscore2.ros路径报错
问题描述:找不到ros/ros.h头文件
可能的原因1:你安装的是ros2,ros2的架构和ros1不同,ros2是不存在ros.h文件的,请下载ros1再试。
可能的原因2:路径出错

如果安装了ros插件一般是不会有问题的。
如果还有问题可以留言,有时间会进行更新常见问题解决。