RTK
RTK(Real-Time Kinematic,实时动态)定位技术是一种高精度的卫星导航技术。相比传统的GPS定位技术,RTK能够在厘米级别的精度范围内提供定位结果。这使得RTK技术在无人机、自动驾驶、工程测绘、农业机械自动化等领域具有广泛应用。
RTK技术的核心在于利用两台或多台GNSS接收器(如GPS、北斗、GLONASS等)之间的相对位置差异,实时校正位置数据。通过高精度的载波相位差分算法,RTK能将传统卫星定位的误差从几米级降低到厘米级。
RTK定位的工作原理
RTK定位的原理基于载波相位差分技术,与传统的伪距差分技术不同,RTK利用了GNSS信号中的载波相位信息。其工作流程可以概括为以下几个步骤:
1.基准站和流动站的配置
RTK系统通常由两个关键部分组成:基准站(Reference Station)和流动站(Rover Station)。基准站的GPS接收器安装在已知的精确位置上,通过接收卫星信号来计算实时的误差数据,并将这些误差信息传送给流动站。流动站则安装在需要进行实时定位的目标上(如无人机或机械设备)。
2.载波相位差分
无论是基准站还是流动站,它们都接收到来自卫星的载波信号。传统GPS主要依赖伪距信号的时间延迟来计算位置,而RTK则利用载波的相位观测量来提高定位精度。载波的波长较短约19厘米,因此通过计算载波相位的精确差异,能够实现厘米级定位。
3.误差修正与实时传输
基准站计算出与流动站之间的误差,并通过无线电台或网络将差分数据发送给流动站。流动站接收这些误差数据后,结合其自身的GNSS信号,实时修正定位结果,达到高精度的定位效果。
4.实时计算与输出
流动站接收到差分数据后,利用RTK算法进行计算,并输出高精度的定位数据。这一过程是实时的,确保了流动站的位置精度始终保持在厘米级别。
观测数据
本文观测数据使用了hk2025年1月1日的观测数据。选取同类型接收机和天线的近距离两个参考站作示范用,流动站hksc,基准站hkss。

分析工具
RTKLIB demo5 b34版本
RTK定位流程
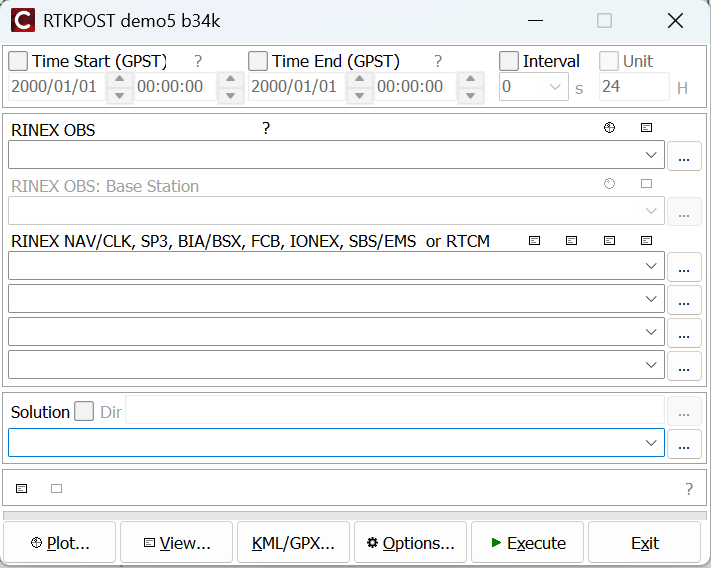
1. 双击打开RTKPOST
配置基准站hksc,
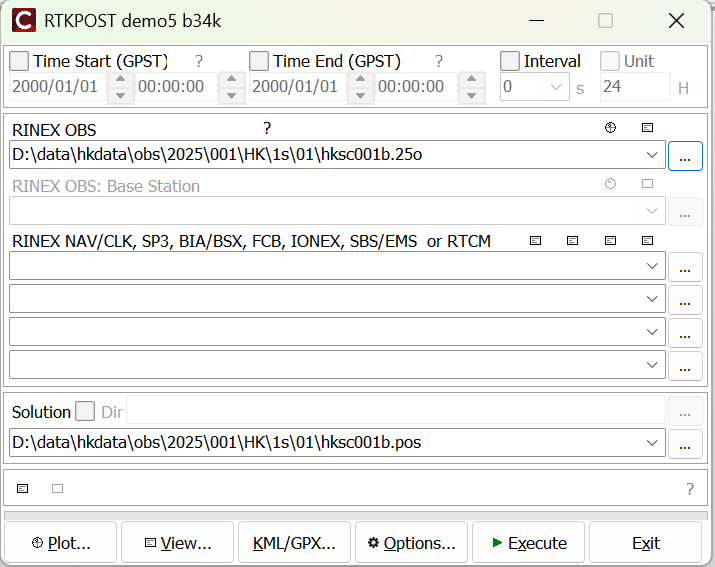
配置基准站,
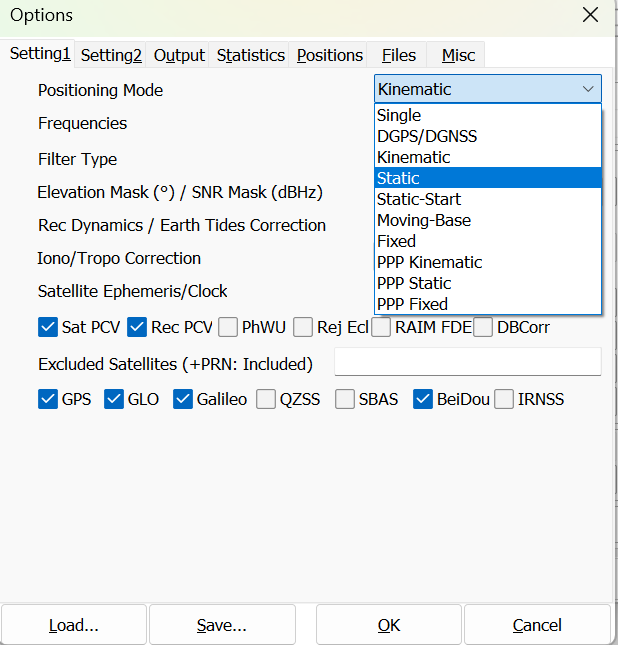
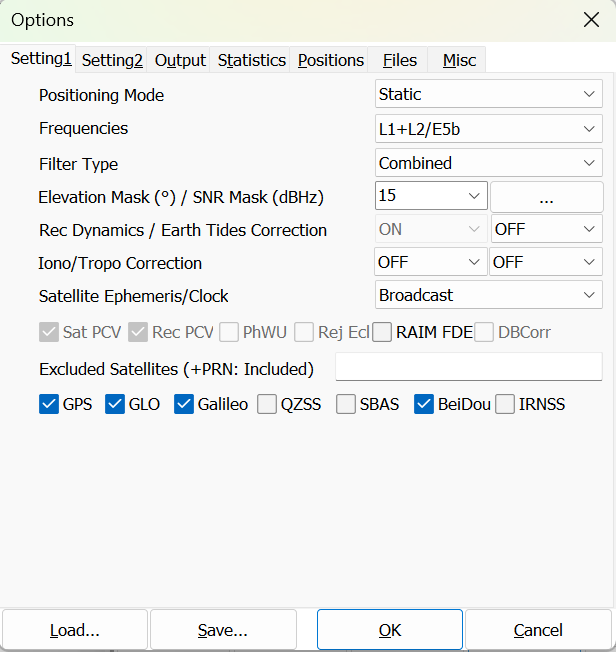
配置Setting1选项卡,RTK的模式包括Kinematic:动态RTK;Static:静态RTK;Static-Start:静态初始;Moving-Base:动对静;Fixed:固定解。此处以Static静态解作为模式选择。
- Frequencies/Filter Type:单频数据的话选L1;双频L1+L2;三频L1+L2+L5。本案例选择双频L1+L2。
- Elevation Mask(°)/SNR Mask:选择高度截止角。截止高度角选择默认15度。以及对观测卫星的信噪比进行筛选设置。
- Filter Type:kalman滤波的类型,Forward前向滤波,backward后向滤波,combined双向滤波。
- Rec Dynamics/Earth Tides Correction:设置接收机动态模式,用于估计接收机位置(仅用于动态RTK模式)/设定地球潮汐改正,其中0:不设置(默认);1:使用固体潮汐校正;2. 使用固体潮汐改正和极潮改正。短基线情况下可选择OFF,长基线情况下可开启。本案例此处选OFF。
- Ionosphere Correction:若不提供电离层数据选则Broadcast;无电离层组合模型选择Iono-Free LC;非组合模型选择Estimate STEC。在RTK模式下,长基线可选择各自改正,短基线情况下大气误差相关性高,可选择OFF。此处选择OFF。
- Troposphere Correction:选择对流层估计模式。在RTK模式下,长基线可选择各自改正,短基线情况下大气误差相关性高,可选择OFF。此处选择OFF。
- Satellite Ephemeris/Clock一栏中若提供了精密钟差选Precise;没有则选择Broadcast。此处选择Broadcast。
- Excluded Satellites一栏可排除指定PRN的卫星。
- 最后可勾选进行解算相应的系统。
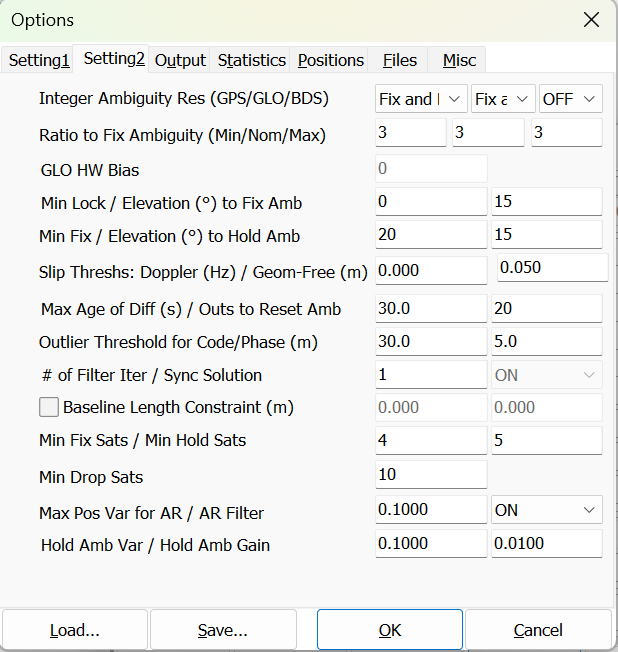
接下来可配置Setting2选项卡,
Integer Ambiguity Res:可以配置不同系统卫星的模糊度固定方式,Fix and hold为固定后不发生周跳的情况下进行保持,Continuous为连续固定,instantanous为每时刻都独立固定,PPP-AR在RTK模式下不进行选择。
- Integer Ambiguity Res:设置模糊度固定策略,默认使用PPP中的模糊度固定方法,即Fix and hold选项,固定后无周跳情况下进行保持。
- Ratio to Fix Ambiguity:输入最小Ratio值,用于设置模糊度的固定阈值。默认使用3,低成本接收机可酌情调整提高模糊度固定率,但降低阈值会带来错误固定概率上升的影响。
- Min Lock / Elevation to Fix Amb:设置固定整周模糊度的最少锁定计数和最小仰角,本案例使用默认参数。
- Min Fix / Elevation to Hold Ambiguity:如果Integer Ambiguity Res一栏中设置为“Fix and Hold”,则该选项中可以设置固定整周模糊度的最小固定数和最小仰角,本案例此处默认。
- Slip Threshs Doppler(Hz)/Geom-Free:周跳探测的门限阈值Doppler/GF组合。本案例此处默认。
- Max Age of Diff(s)/ Out to Reset Amb:设置流动站和基准站之间的时间差最大值(PPP和SPP模式下该项不参与解算),设置模糊度固定算法的中断阈值,若超过这一阈值则估计的模糊度将重置为初始值,设置线性组合载波相位差的周跳阈值
- Outlier Threshold for Code/Phase:伪距和载波判定为粗差的门限阈值。本案例此处默认。
- Number of Filter Iteration/Sync Solution:设置用于测量更新的估计滤波器的迭代次数,以及时间的同步方式,本示例默认。
- Baseline Length Constraint:基线长度限制,该参数仅在Moving-Base模式下有效,PPP及SPP模式下不可选。
- Min Fix Sats/ Min Hold Sats:固定需要的最小卫星数量,以及保持需要的最小卫星数量。本示例使用默认参数。
- Max Pos Var for AR/AR Filter:AR滤波器的最大定位残差协方差以及AR滤波器是否开启。本案例默认打开。
- Hold Amb Var/Hold Amb Gain:模糊度保持的方差和增益参数设置,本案例默认。
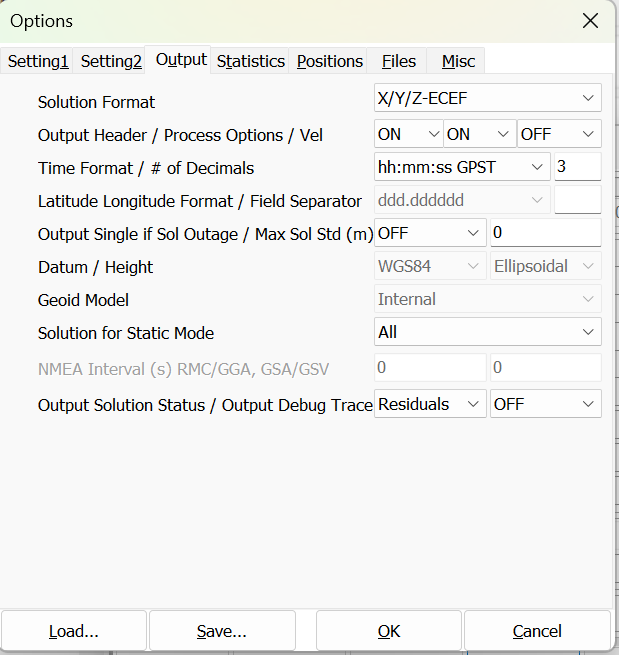
接下来可配置output选项卡,按需选择即可,这里选择了ECEF坐标系方便偏差计算。
- solution Format可选择坐标的呈现形式,Lat/Lon/Height表示经纬高坐标,XYZ-ECEF表示地心地固系下的xyz坐标,ENU-baseline表示输出的是ENU东北天坐标系,NMEA A0183则是nema格式。按需求选择即可。
- output Header打开会输出文件头,Process Options会打开过程相关信息,这两个默认打开即可。Vel则是输出速度,静态无需打开,动态可考虑打开。
- Time Format:则可选择时间的表示形式以及小数点的显示位数。
- Latitude Longtitude Format:可配置经纬度的显示形式和位数。
- Field Separator:设置输出文件中每个值之间的分隔符
- Datum/Height:若输出格式为经纬度时设置坐标基准(包括WGS84和Tokyo)/设置高程类型,包括椭球高(Ellipsoidal)和大地高(Geodetic)
- Geoid Model:如果Height选项设置为大地高(Geodetic),则通过该选项设置大地水准面模型。
- Solution for Static Mode:PPP-Static模式下选择输出解的类型,All选项:输出处理周期内的所有结果;Single选项:只输出处理周期内的一个解,解的历元为处理周期的起始历元。
- NMEA Interval (s) RMC/GGA:设置NMEA GPRMC、GPGGA消息的输出间隔,小于0不输出,等于0输出全部(仅用于导航或实时定位模式)
- Output Solution Status/Debug Trace:设置是否输出解决方案文件(包括状态估计和残差信息)/设置是否输出调试(Debug)文件。
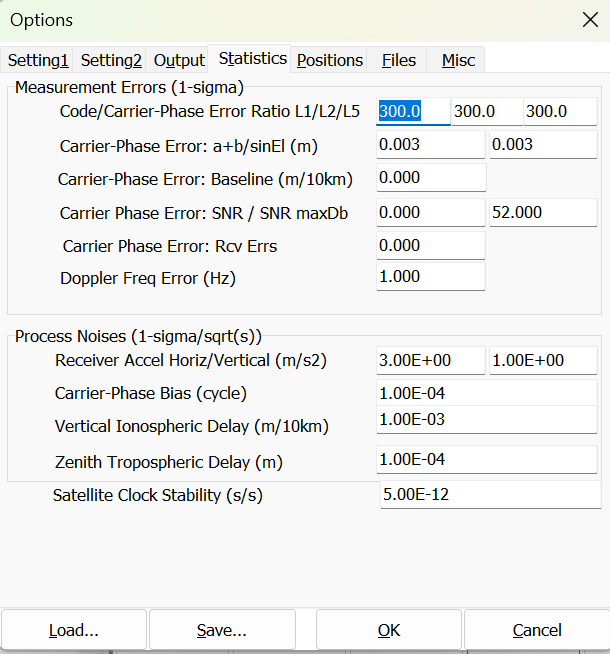
下面进行Statistic选项卡的配置。
- Code/Carrier-Phase Error Rate L1/L2:设置L1和L2/L5/L6伪距误差的标准差与载波相位误差的比值。
- Carrier-Phase Error a+b/sinEI (m):设置载波相位误差标准差的仰角相关项
- Carrier-Phase Error/Baseline(m/10km):设置载波相位误差标准差的基线长度相关项
- Doppler Frequency(Hz):设置多普勒误差的标准偏差(Hz)(当前版本不使用该值)
- Receiver Accel Horiz/Vertical:设置接收机加速度的过程噪声标准差为水平或垂直分量,如果“Receiver Dynamics”设置为OFF,则该选项不参与解算。
- Carrier-Phase Bias:设置载波相位偏差的过程噪声的标准差
- Vertical Ionospheric Delay:设置每10km基线的垂直电离层延迟的过程噪声标准差
- Zenith Tropospheric Delay:设置天顶对流层延迟的过程噪声标准差
- Satellite Clock Stability:设置卫星时钟稳定性(s/s)。该值用于基站观测数据的插值
无特殊要求默认即可。
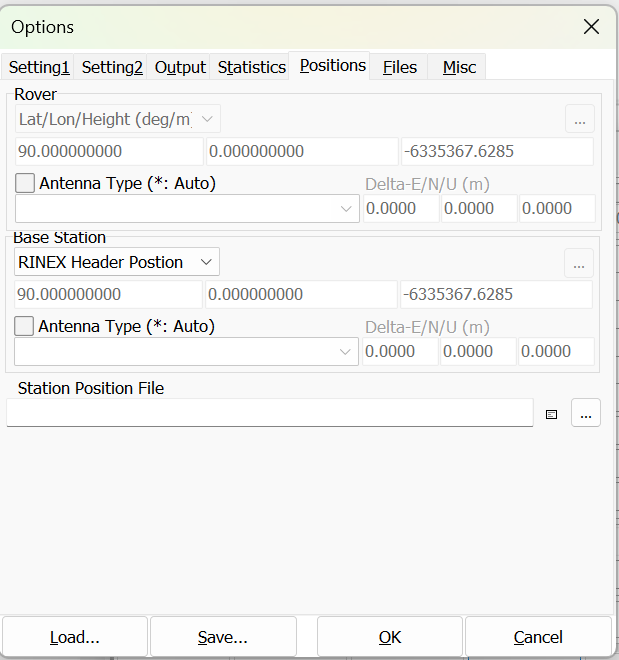
接下来是Positions的配置,需要注意的是,RTK属于相对定位,基准站的坐标必须非常准确,才能避免固定bias的引入。因为香港CORS站属于静态CORS站,数据长时间收敛,使用RINEX文件头坐标即可。
如果基准站和流动站天线类型不一致的情况下,可勾选两边的Antenna Type进行天线的类型选择,避免天线相关误差的引入。如果基准站和流动站天线类型一致,同类型误差可通过RTK的差分消除,该步骤则可省略。本案例使用的hkss和hksc天线类型都属于LEIAR25.R4,因此可省略此步骤。

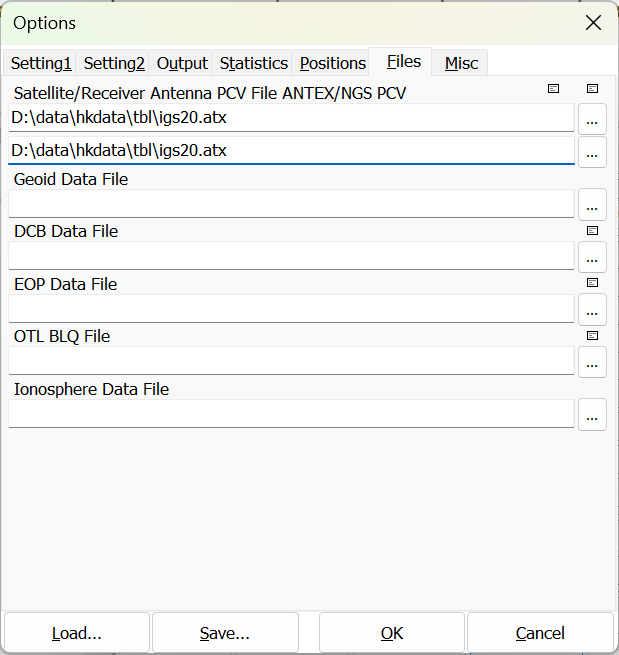
配置ATX文件。
配置Base Station也就是基准站路径。

配置星历,本案例此处选择对应的广播星历路径。
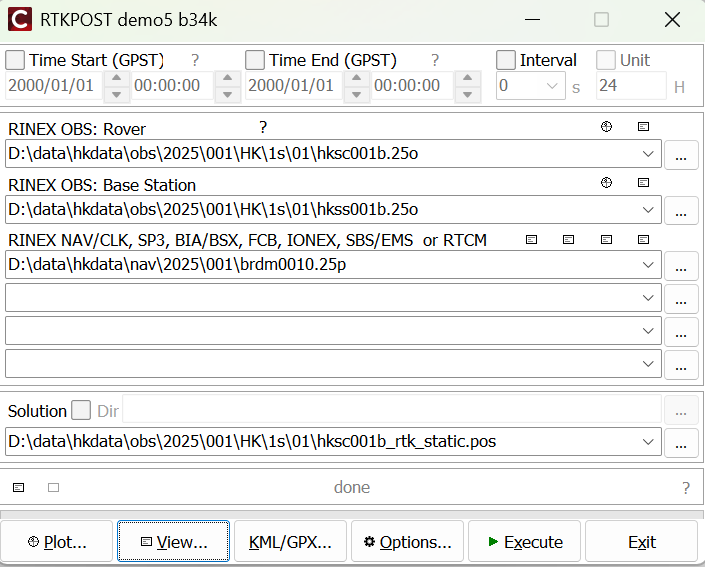
点击Execute运行。

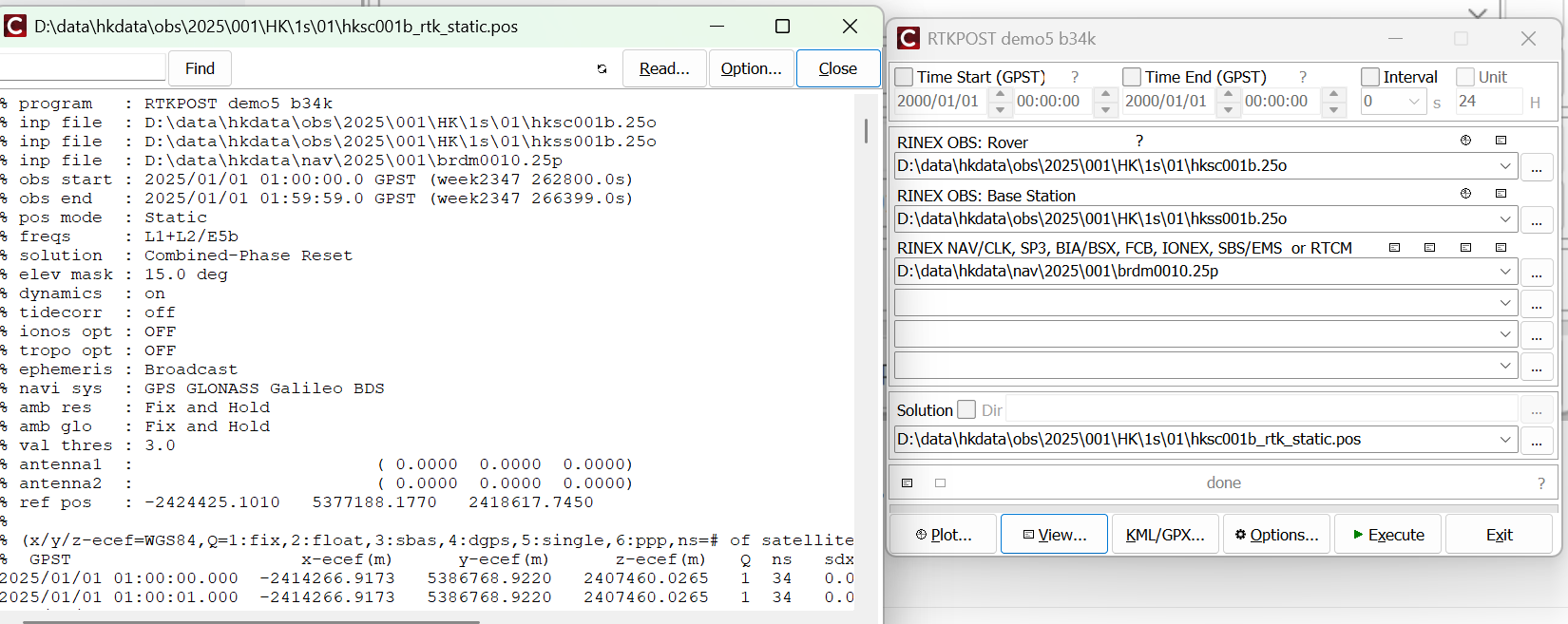
执行完毕后,可以通过View查看运行结果的文本形式,注意此处Q=1表示固定解,RTK的固定解精度一般在厘米级,浮点解(Q=2)精度一般在分米级。
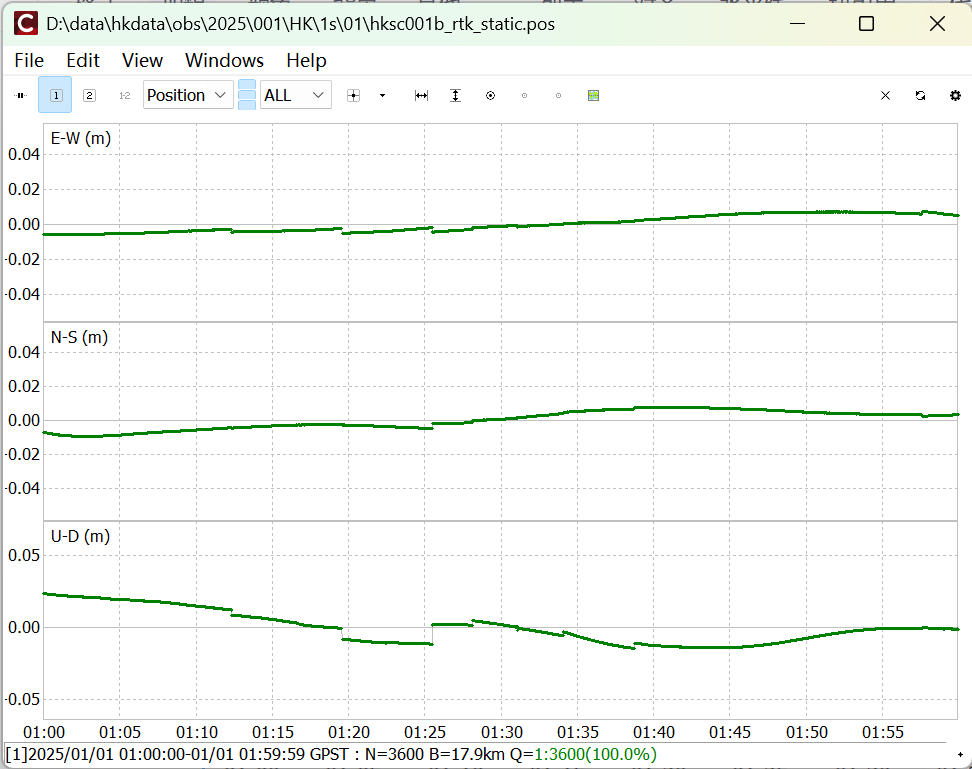
点击Plot则可以查看RTK运行结果的绘图输出形式。
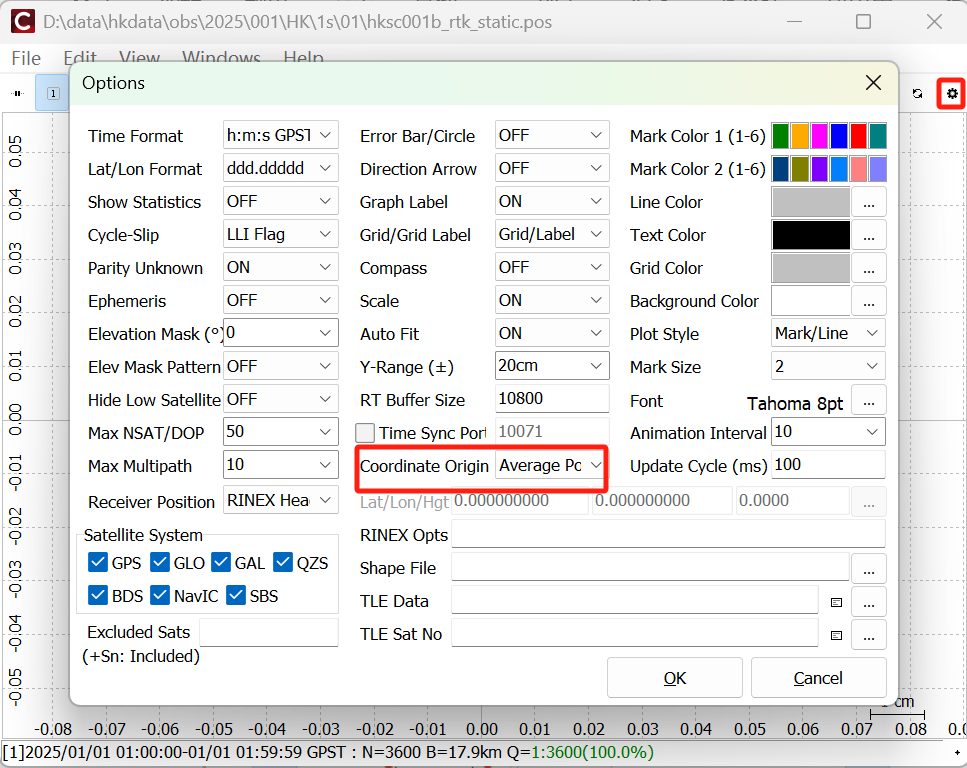
如果要消除基准,可在配置中将Coordinate Origin按需选择,此处选择Average Pos,消去平均偏差查看bias影响。
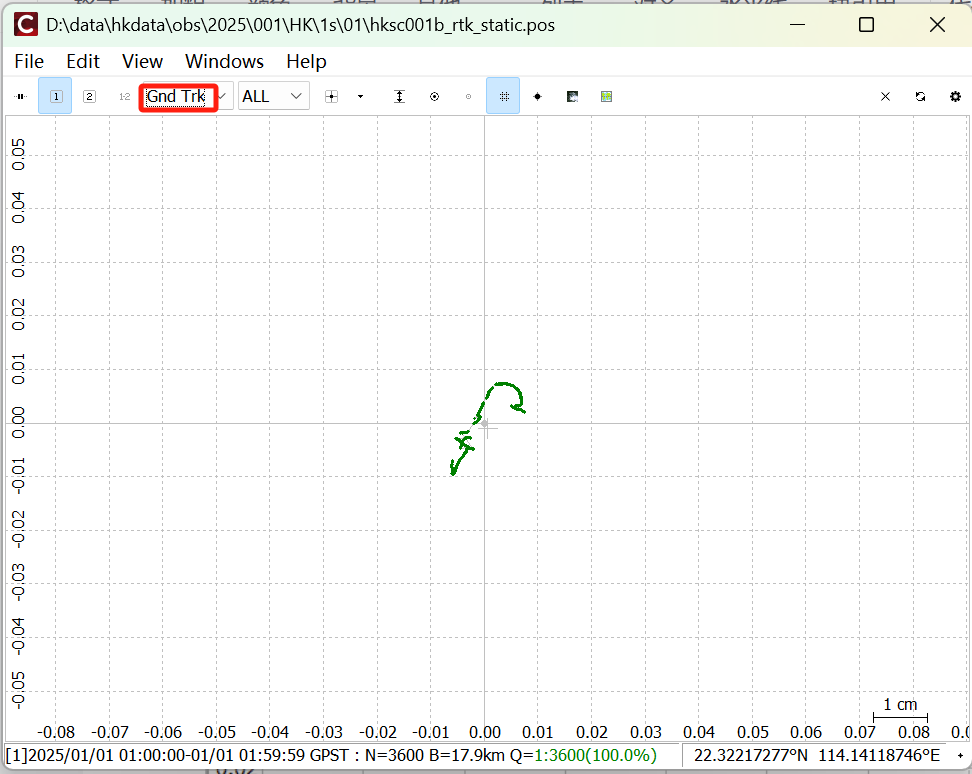
切换为gnd rtk,可以查看偏离散点图。
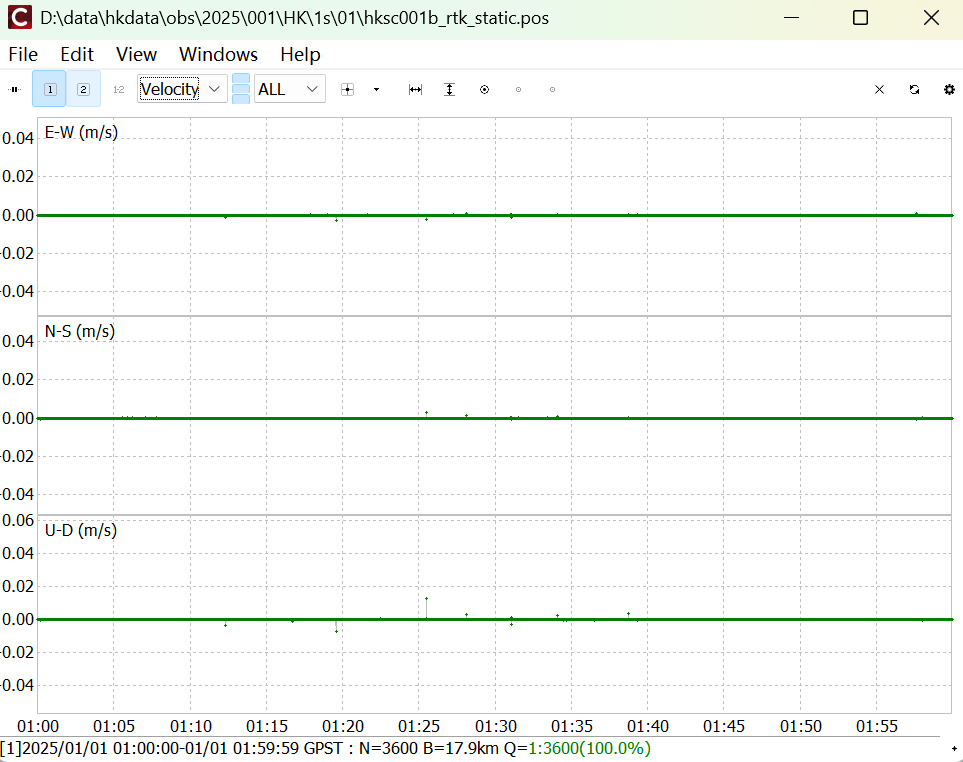
切换成velocity,可以查看速度情况。
切换成Accel,可以查看加速度情况。

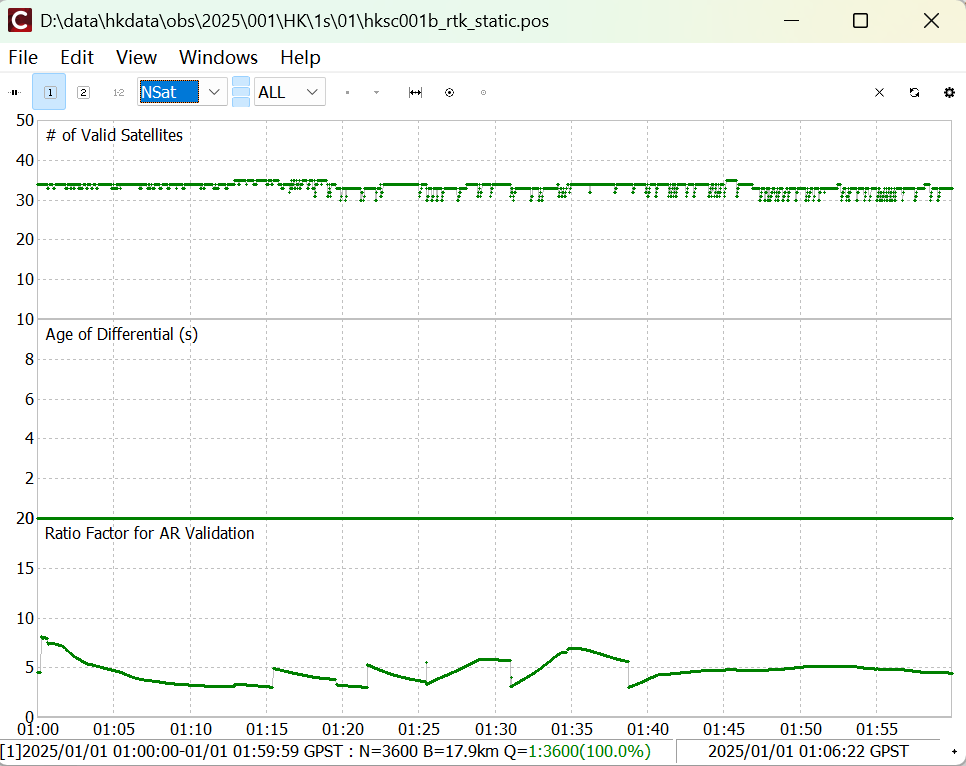
切换到NSAT,可以查看卫星数和Ratio值的情况。
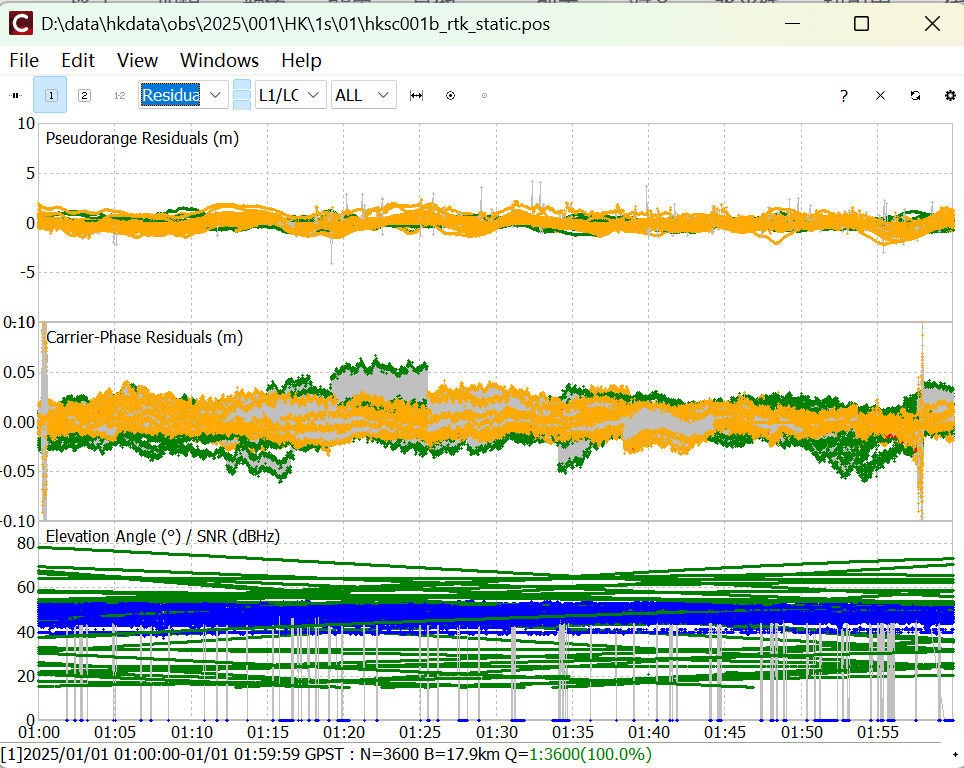
Residual显示了伪距和相位残差以及高度角随时间的变化情况。
Resid-EL则反映了残差随高度角变化的情况。通常来说高度角越低,残差容易越大。

Ref:
https://zhuanlan.zhihu.com/p/17631039979