前言:
大家好,在上一篇文章里面,我给大家解读了怎么获取imx415-sensor的实时码流的细节,今天开始会解析里面到底是怎么实现的?
提前透露一点,整个摄像头驱动框架和上层调用,都会涉及到v4l2的开发使用,所以对于v4l2的掌握非常重要。
mpp编码器框架执行流程:
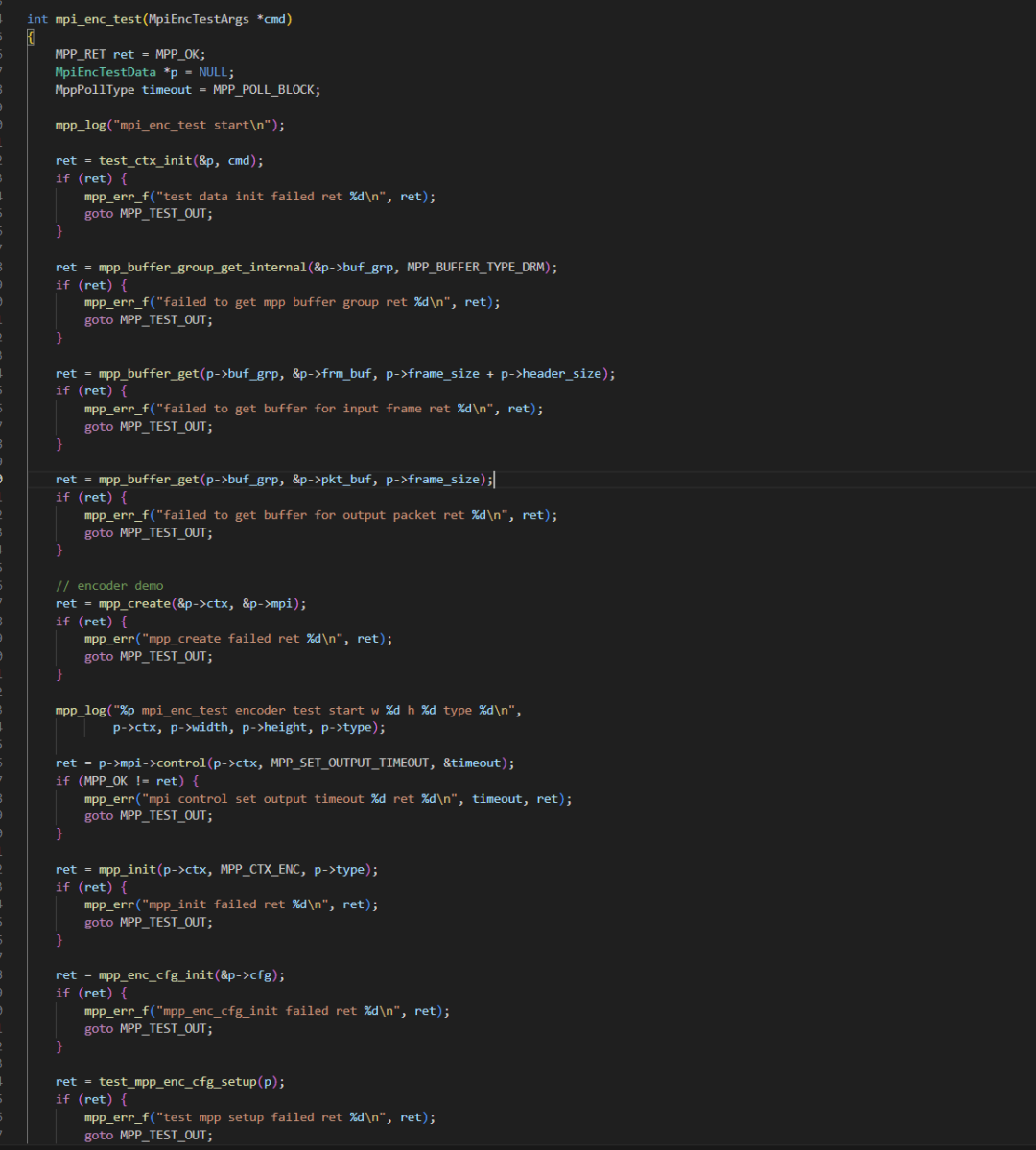
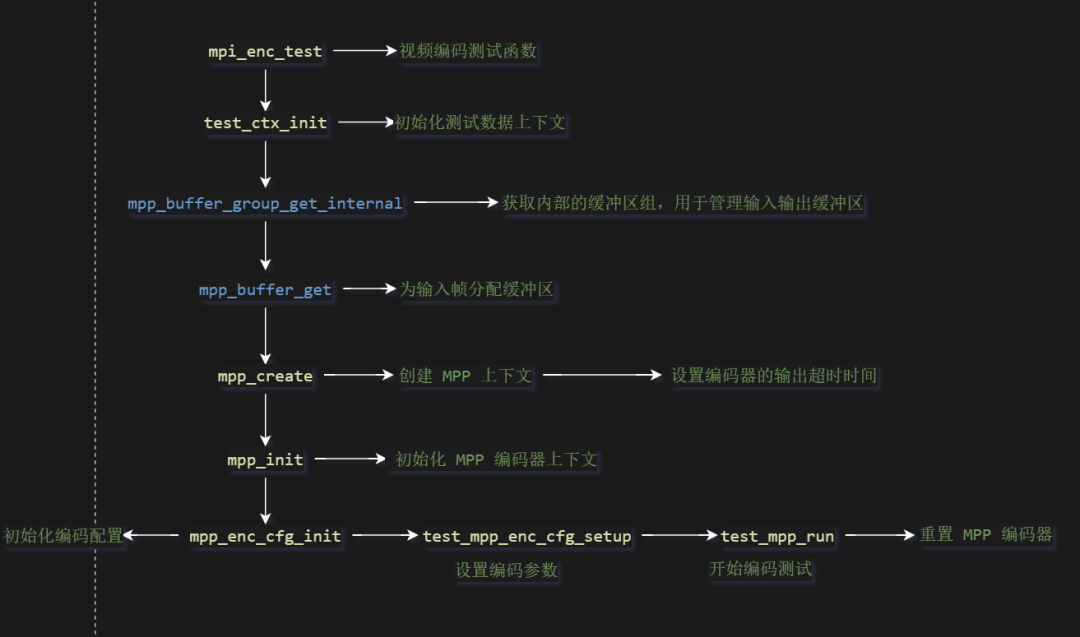
整个mpp单路码流测试源码,我们从下面这个接口mpi_enc_test开始解读,一步一步来学习里面的原理和实现:
下面是整个代码的执行流程图:
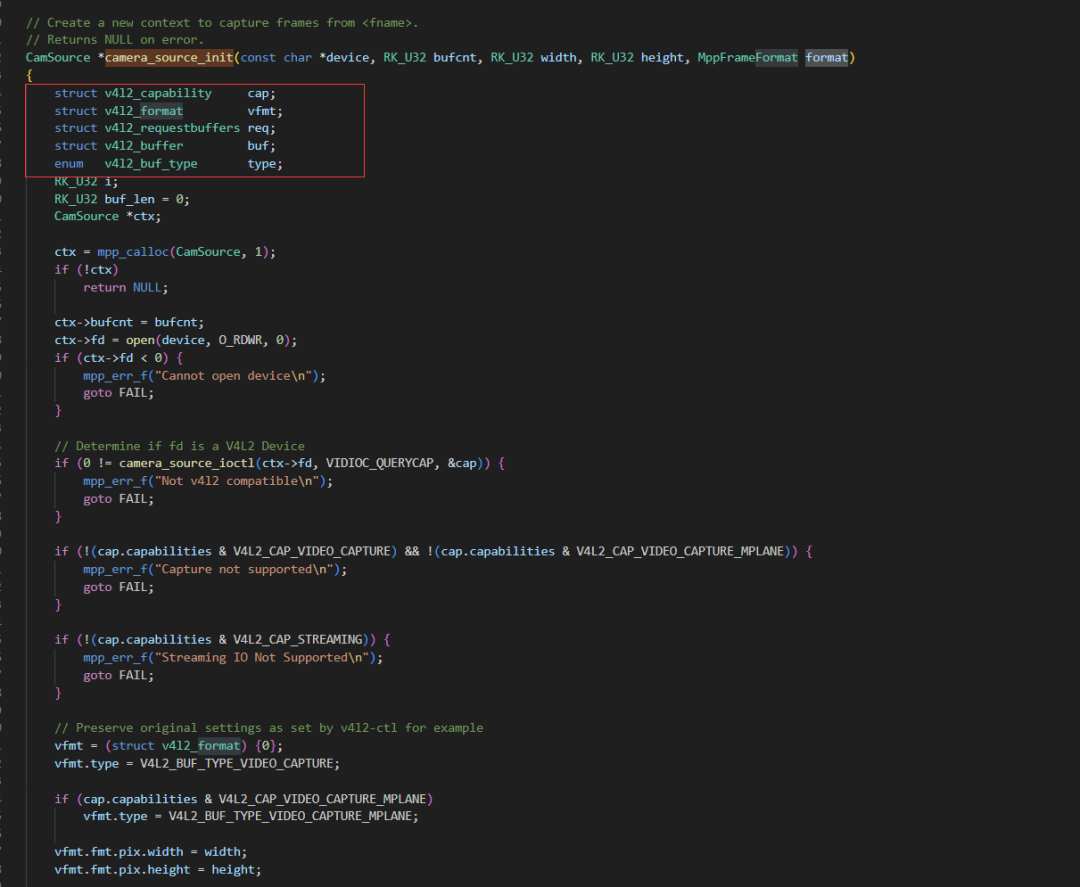
我们今天的重点在接口test_ctx_init接口,里面涉及到大量的v4l2和mpp缓冲池的操作,而这个接口里面最为重要的是下面划线这个接口,这个接口里面会涉及摄像头码流的开启和停止:
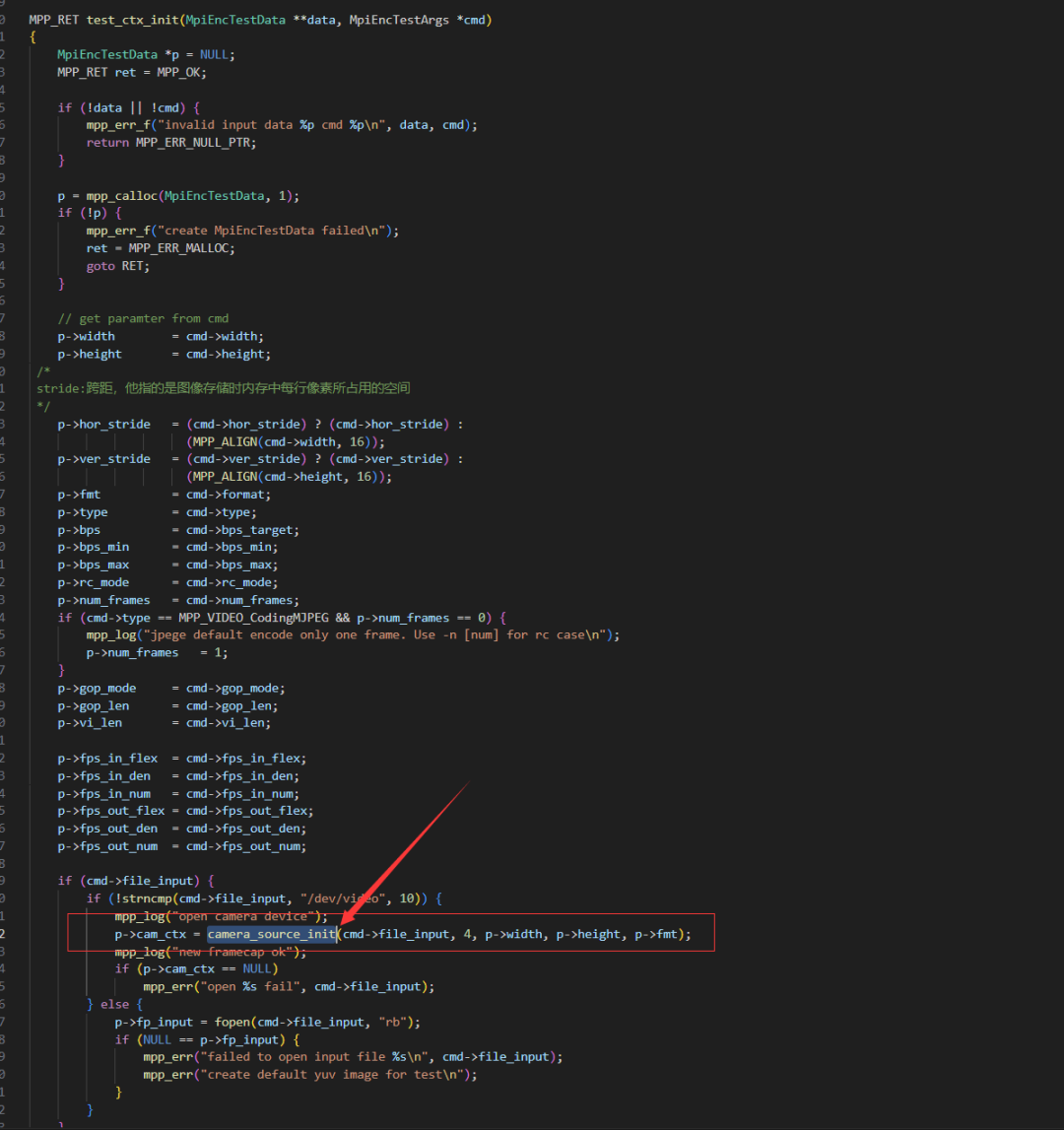
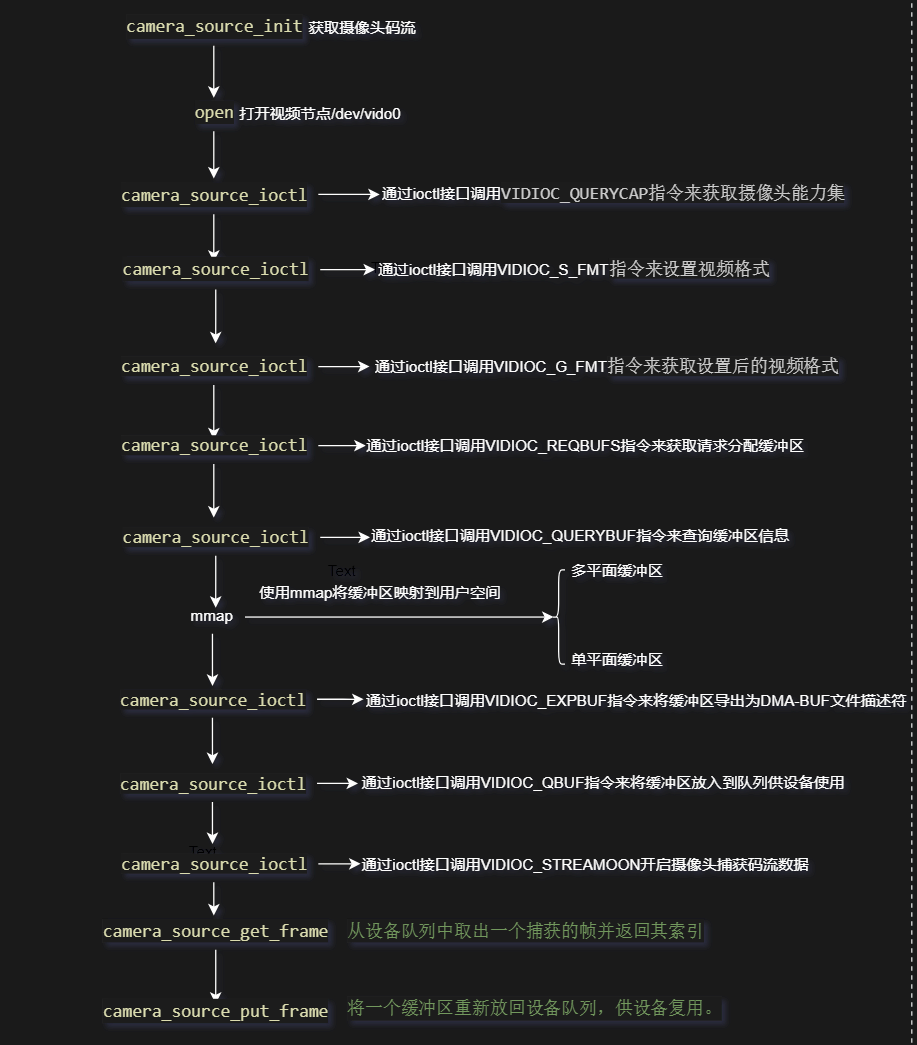
接下来我们就开始进入到这个接口里面,看一下他里面的代码执行流程框架,然后再开始详细解读,里面也会讲解基础的v4l2的知识点,照顾一些朋友没有接触过v4l2的朋友:
v4l2几个关键结构体和ioctl指令解读:
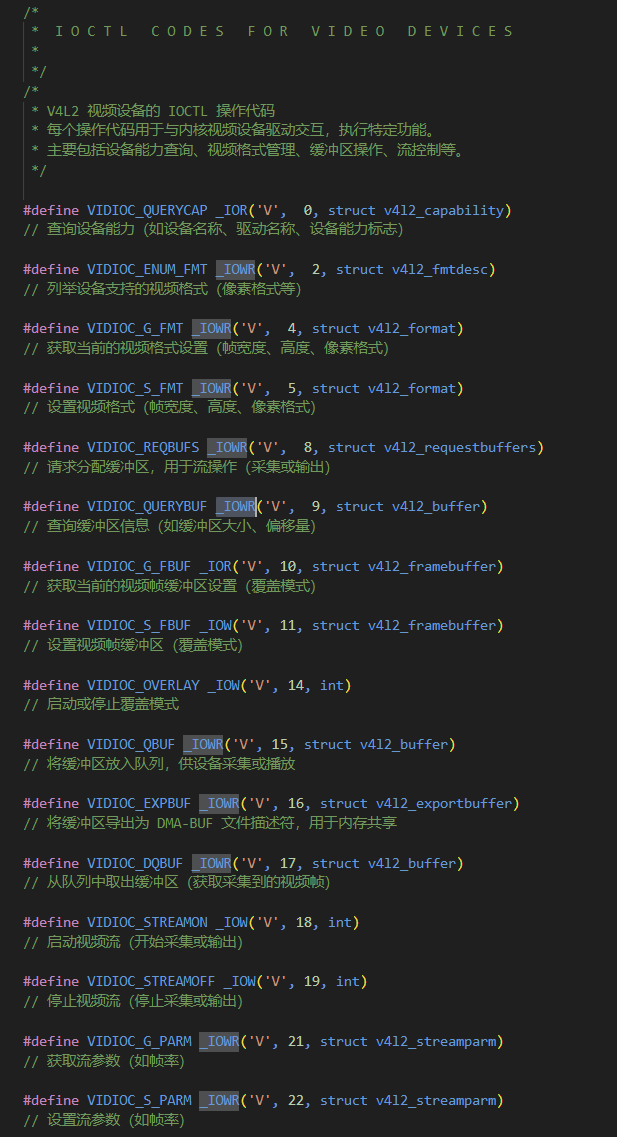
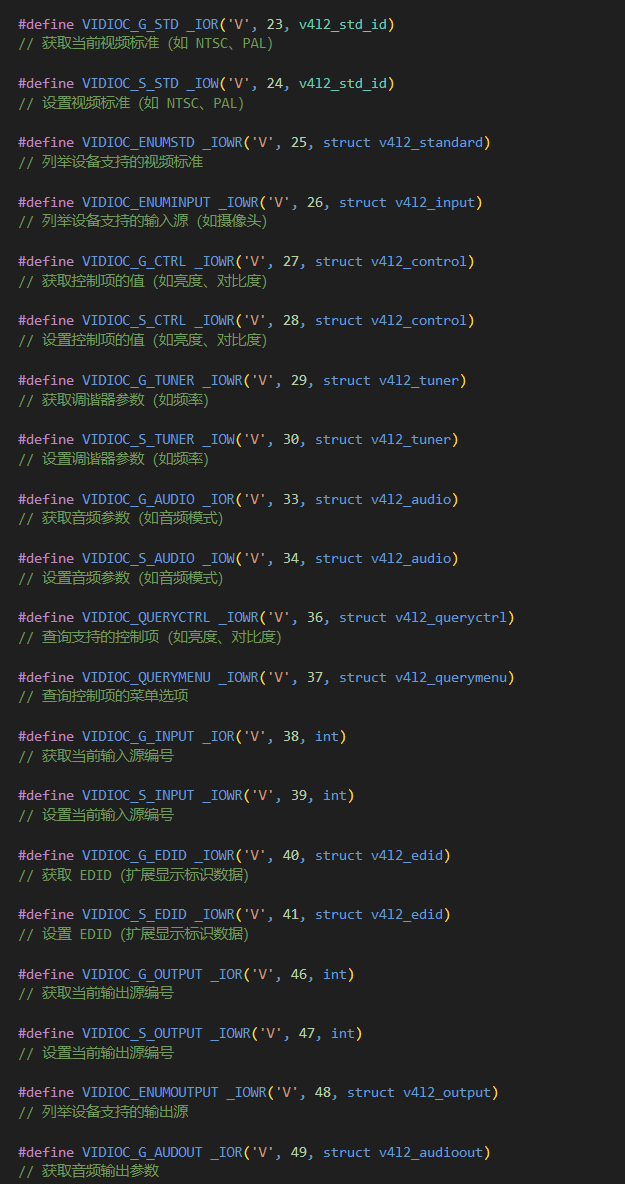
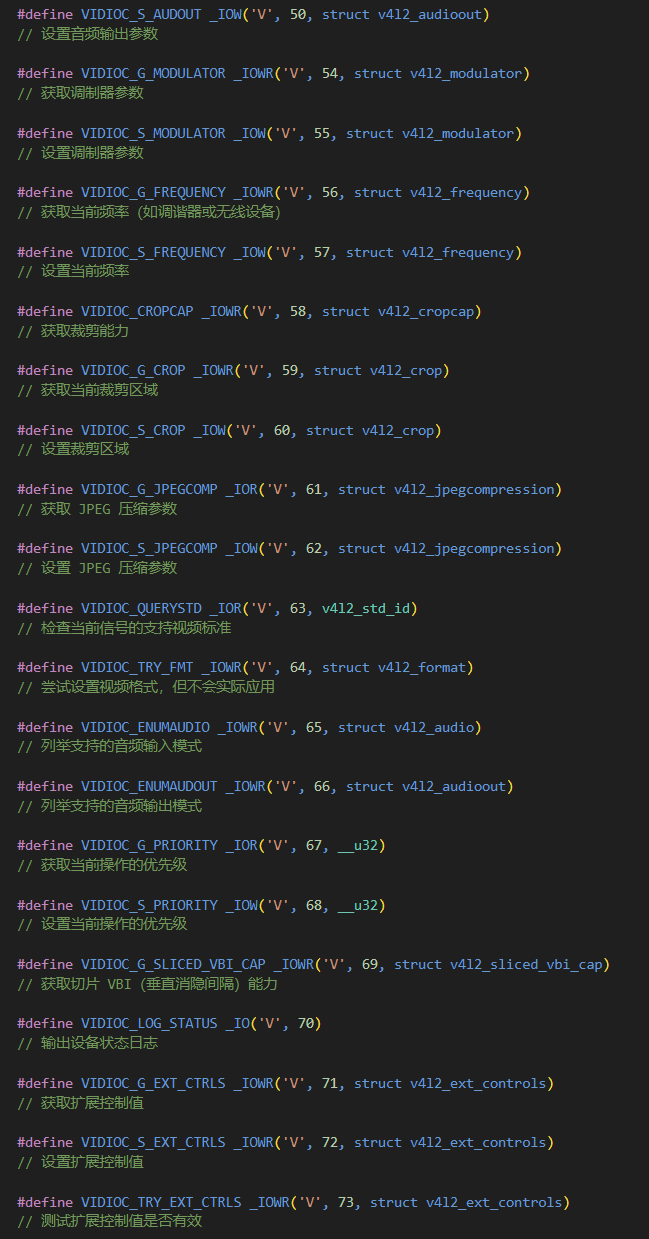
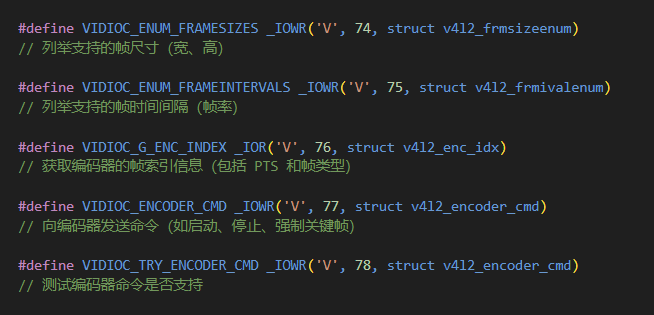
首先ioctl指令操作代码在Linux内核源码头文件videodev2.h汇总如下:
下面我们来看源码里面的结构体结构体解析:
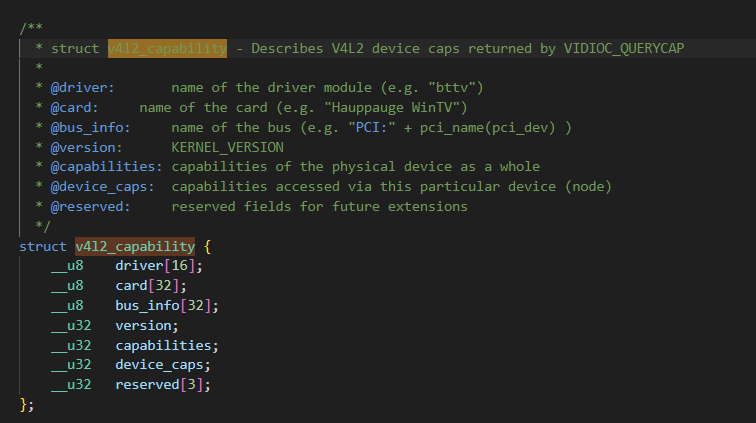
1、struct v4l2_capability结构体:
/**
* struct v4l2_capability - 用于描述 V4L2 设备能力的信息结构体
*
* VIDIOC_QUERYCAP 是一个 V4L2 IOCTL 命令,用于查询视频设备的基本能力信息。
* 用户程序可以通过调用此命令,填充此结构体以获取以下信息:
* - 驱动程序的名称
* - 设备的硬件名称
* - 设备连接的总线信息
* - 驱动程序的版本
* - 设备的整体功能以及当前设备节点的功能
*
* 结构体成员说明:
*
* @driver: 驱动模块的名称(如 "bttv")。
* 表示设备所使用的驱动程序。
*
* @card: 硬件卡的名称(如 "Hauppauge WinTV")。
* 表示具体的硬件设备名称,用于标识设备型号或品牌。
*
* @bus_info: 设备连接总线的信息(如 "PCI:0000:00:1f.2")。
* 表示设备连接的总线类型及其标识信息,例如 PCI、USB 等。
*
* @version: 驱动程序的版本号,通常以 KERNEL_VERSION 宏生成。
* 格式为主版本号、次版本号和补丁版本号。
*
* @capabilities: 设备整体功能标志位,描述设备支持的功能。
* 例如,支持视频捕获(V4L2_CAP_VIDEO_CAPTURE)、
* 视频输出(V4L2_CAP_VIDEO_OUTPUT)等。
*
* @device_caps: 当前设备节点(如 /dev/video0)提供的功能标志位。
* 可能是 `capabilities` 的子集,具体描述此节点的功能。
*
* @reserved: 保留字段,为将来扩展预留空间。
*/
struct v4l2_capability {
__u8 driver[16]; /* 驱动程序的名称 */
__u8 card[32]; /* 硬件卡的名称 */
__u8 bus_info[32]; /* 总线信息 */
__u32 version; /* 驱动程序版本号 */
__u32 capabilities; /* 设备整体功能 */
__u32 device_caps; /* 当前设备节点功能 */
__u32 reserved[3]; /* 保留字段 */
};常见功能标志位有:
/* 'capabilities' 字段的值定义 */
#define V4L2_CAP_VIDEO_CAPTURE 0x00000001 /* 是视频捕获设备 */
#define V4L2_CAP_VIDEO_OUTPUT 0x00000002 /* 是视频输出设备 */
#define V4L2_CAP_VIDEO_OVERLAY 0x00000004 /* 支持视频叠加功能 */
#define V4L2_CAP_VBI_CAPTURE 0x00000010 /* 是原始 VBI 捕获设备 */
#define V4L2_CAP_VBI_OUTPUT 0x00000020 /* 是原始 VBI 输出设备 */
#define V4L2_CAP_SLICED_VBI_CAPTURE 0x00000040 /* 是分片 VBI 捕获设备 */
#define V4L2_CAP_SLICED_VBI_OUTPUT 0x00000080 /* 是分片 VBI 输出设备 */
#define V4L2_CAP_RDS_CAPTURE 0x00000100 /* 支持 RDS 数据捕获 */
#define V4L2_CAP_VIDEO_OUTPUT_OVERLAY 0x00000200 /* 支持视频输出叠加 */
#define V4L2_CAP_HW_FREQ_SEEK 0x00000400 /* 支持硬件频率搜索 */
#define V4L2_CAP_RDS_OUTPUT 0x00000800 /* 是一个 RDS 编码器 */
/* 是支持多平面格式的视频捕获设备 */
#define V4L2_CAP_VIDEO_CAPTURE_MPLANE 0x00001000
/* 是支持多平面格式的视频输出设备 */
#define V4L2_CAP_VIDEO_OUTPUT_MPLANE 0x00002000
/* 是支持多平面格式的视频内存到内存设备 */
#define V4L2_CAP_VIDEO_M2M_MPLANE 0x00004000
/* 是视频内存到内存设备 */
#define V4L2_CAP_VIDEO_M2M 0x00008000
#define V4L2_CAP_TUNER 0x00010000 /* 具有调谐器功能 */
#define V4L2_CAP_AUDIO 0x00020000 /* 支持音频功能 */
#define V4L2_CAP_RADIO 0x00040000 /* 是一个无线电设备 */
#define V4L2_CAP_MODULATOR 0x00080000 /* 支持调制器功能 */
#define V4L2_CAP_SDR_CAPTURE 0x00100000 /* 是一个 SDR 捕获设备 */
#define V4L2_CAP_EXT_PIX_FORMAT 0x00200000 /* 支持扩展像素格式 */
#define V4L2_CAP_SDR_OUTPUT 0x00400000 /* 是一个 SDR 输出设备 */
#define V4L2_CAP_META_CAPTURE 0x00800000 /* 是一个元数据捕获设备 */
#define V4L2_CAP_READWRITE 0x01000000 /* 支持 read/write 系统调用 */
#define V4L2_CAP_ASYNCIO 0x02000000 /* 支持异步 I/O */
#define V4L2_CAP_STREAMING 0x04000000 /* 支持流式 I/O ioctls */
#define V4L2_CAP_TOUCH 0x10000000 /* 是一个触控设备 */
#define V4L2_CAP_DEVICE_CAPS 0x80000000 /* 设置设备能力字段 */2、struct v4l2_format结构体:
/**
* struct v4l2_format - 流数据格式描述结构体
*
* 此结构体用于定义 V4L2 的数据流格式,可以通过 IOCTL 命令
(如 VIDIOC_G_FMT、VIDIOC_S_FMT)进行获取或设置。
* 根据数据流的类型,不同的字段会被使用。
*
* @type: 枚举类型 `enum v4l2_buf_type`,表示数据流的类型。
* 常见的值包括:
* - V4L2_BUF_TYPE_VIDEO_CAPTURE:视频捕获
* - V4L2_BUF_TYPE_VIDEO_OUTPUT:视频输出
* - V4L2_BUF_TYPE_VIDEO_OVERLAY:视频叠加
* - V4L2_BUF_TYPE_VBI_CAPTURE:VBI 捕获
* - V4L2_BUF_TYPE_SDR_CAPTURE:SDR 捕获
*
* @pix: 表示单平面图像格式的定义(用于 V4L2_BUF_TYPE_VIDEO_CAPTURE)。
* 结构体 `v4l2_pix_format` 包含图像分辨率、像素格式等信息。
*
* @pix_mp: 表示多平面图像格式的定义(用于 V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE)。
* 结构体 `v4l2_pix_format_mplane` 用于描述支持多平面格式的设备,
例如 YUV420 格式的不同平面。
*
* @win: 表示视频叠加窗口的定义(用于 V4L2_BUF_TYPE_VIDEO_OVERLAY)。
* 结构体 `v4l2_window` 定义了叠加窗口的位置和尺寸。
*
* @vbi: 表示原始 VBI(垂直消隐间隔)捕获或输出的参数(用于 V4L2_BUF_TYPE_VBI_CAPTURE 或 V4L2_BUF_TYPE_VBI_OUTPUT)。
* 结构体 `v4l2_vbi_format` 定义了 VBI 的格式和相关属性。
*
* @sliced: 表示分片 VBI(垂直消隐间隔)捕获或输出的参数(用于 V4L2_BUF_TYPE_SLICED_VBI_CAPTURE 或 V4L2_BUF_TYPE_SLICED_VBI_OUTPUT)。
* 结构体 `v4l2_sliced_vbi_format` 定义了分片 VBI 的格式。
*
* @sdr: 表示 SDR(软件定义无线电)捕获设备的格式(用于 V4L2_BUF_TYPE_SDR_CAPTURE)。
* 结构体 `v4l2_sdr_format` 描述 SDR 的采样率、格式等信息。
*
* @meta: 表示元数据捕获设备的格式(用于 V4L2_BUF_TYPE_META_CAPTURE)。
* 结构体 `v4l2_meta_format` 定义元数据的格式及相关属性。
*
* @raw_data: 用户自定义数据的占位符(保留扩展字段,长度为 200 字节)。
* 该字段用于未来扩展或自定义格式。
*/
struct v4l2_format {
__u32 type; /* 数据流的类型 */
union {
struct v4l2_pix_format pix; /* 单平面视频捕获 */
struct v4l2_pix_format_mplane pix_mp; /* 多平面视频捕获 */
struct v4l2_window win; /* 视频叠加 */
struct v4l2_vbi_format vbi; /* 原始 VBI 捕获或输出 */
struct v4l2_sliced_vbi_format sliced; /* 分片 VBI 捕获或输出 */
struct v4l2_sdr_format sdr; /* SDR 捕获 */
struct v4l2_meta_format meta; /* 元数据捕获 */
__u8 raw_data[200]; /* 自定义数据 */
} fmt; /* 数据流格式的联合体 */
};
/*
* V I D E O I M A G E F O R M A T
*/
struct v4l2_pix_format {
__u32 width;
__u32 height;
__u32 pixelformat;
__u32 field; /* enum v4l2_field */
__u32 bytesperline; /* for padding, zero if unused */
__u32 sizeimage;
__u32 colorspace; /* enum v4l2_colorspace */
__u32 priv; /* private data, depends on pixelformat */
__u32 flags; /* format flags (V4L2_PIX_FMT_FLAG_*) */
union {
/* enum v4l2_ycbcr_encoding */
__u32 ycbcr_enc;
/* enum v4l2_hsv_encoding */
__u32 hsv_enc;
};
__u32 quantization; /* enum v4l2_quantization */
__u32 xfer_func; /* enum v4l2_xfer_func */
};上面的成员:filed:
/*
* E N U M S
*
* enum v4l2_field - 场(Field)模式枚举
*
* 此枚举定义了视频缓冲区中场模式的类型。场(Field)是视频的扫描方式,
* 常见于隔行扫描(Interlaced)的视频帧中。不同的场模式适用于不同的视频格式和设备。
*
* @V4L2_FIELD_ANY: 设备驱动可以自行选择场模式,具体可能是无场(NONE)、顶场(TOP)、底场(BOTTOM)
* 或隔行(INTERLACED),由驱动根据实际情况决定。
* @V4L2_FIELD_NONE: 视频帧没有场信息,通常用于逐行扫描(Progressive Scan)。
* @V4L2_FIELD_TOP: 仅包含顶场(Top Field)。
* @V4L2_FIELD_BOTTOM: 仅包含底场(Bottom Field)。
* @V4L2_FIELD_INTERLACED: 隔行扫描模式,包含顶场和底场,交替显示。
* @V4L2_FIELD_SEQ_TB: 顺序扫描模式,顶场和底场按顺序存储在一个缓冲区中,顺序为顶-底(Top-Bottom)。
* @V4L2_FIELD_SEQ_BT: 顺序扫描模式,顶场和底场按顺序存储在一个缓冲区中,顺序为底-顶(Bottom-Top)。
* @V4L2_FIELD_ALTERNATE: 顶场和底场交替存储在不同的缓冲区中。
* @V4L2_FIELD_INTERLACED_TB: 隔行扫描模式,顶场优先,且顶场先传输。
* @V4L2_FIELD_INTERLACED_BT: 隔行扫描模式,顶场优先,但底场先传输。
*/
enum v4l2_field {
V4L2_FIELD_ANY = 0, /* 驱动可以根据需要选择适当的场模式 */
V4L2_FIELD_NONE = 1, /* 无场模式(逐行扫描) */
V4L2_FIELD_TOP = 2, /* 仅顶场 */
V4L2_FIELD_BOTTOM = 3, /* 仅底场 */
V4L2_FIELD_INTERLACED = 4, /* 隔行扫描(顶场+底场) */
V4L2_FIELD_SEQ_TB = 5, /* 顺序扫描(顶场-底场) */
V4L2_FIELD_SEQ_BT = 6, /* 顺序扫描(底场-顶场) */
V4L2_FIELD_ALTERNATE = 7, /* 顶场和底场交替存储 */
V4L2_FIELD_INTERLACED_TB = 8, /* 隔行扫描(顶场优先,顶场先传输) */
V4L2_FIELD_INTERLACED_BT = 9, /* 隔行扫描(顶场优先,底场先传输) */
};还有上面的 pixelformat:
3、struct v4l2_requestbuffers结构体:
/*
* M E M O R Y - M A P P I N G B U F F E R S
*
* struct v4l2_requestbuffers - 请求缓冲区的结构体
*
* 此结构体用于视频捕获设备通过内存映射(mmap)或用户指针(user pointer)方式分配缓冲区。
* 应用程序通过调用 IOCTL 命令(如 VIDIOC_REQBUFS)请求驱动程序分配指定数量的缓冲区,
* 这些缓冲区可以用来存储捕获的图像或视频帧。
*
* @count: 缓冲区的数量,应用程序请求分配的缓冲区数量。
* 驱动程序会尝试满足该请求,但可能会分配更少的缓冲区。
*
* @type: 缓冲区的类型,使用枚举 `enum v4l2_buf_type`。
* 表示缓冲区用于何种数据流,例如:
* - V4L2_BUF_TYPE_VIDEO_CAPTURE:视频捕获缓冲区
* - V4L2_BUF_TYPE_VIDEO_OUTPUT:视频输出缓冲区
*
* @memory: 缓冲区的内存类型,使用枚举 `enum v4l2_memory`。
* 描述缓冲区的使用方式,例如:
* - V4L2_MEMORY_MMAP:缓冲区通过内存映射访问
* - V4L2_MEMORY_USERPTR:缓冲区由用户空间提供指针
* - V4L2_MEMORY_DMABUF:缓冲区通过 DMA 缓冲区访问
*
* @capabilities: 缓冲区的能力标志,用于扩展支持功能。
* 通常在应用程序中设置为 0 或忽略。
*
* @reserved: 保留字段,为未来扩展预留空间。
*/
struct v4l2_requestbuffers {
__u32 count; /* 缓冲区数量 */
__u32 type; /* 缓冲区类型 */
__u32 memory; /* 内存类型 */
__u32 capabilities; /* 缓冲区能力标志 */
__u32 reserved[1]; /* 保留字段 */
};
/* capabilities 字段的标志位定义,用于描述缓冲区支持的功能 */
#define V4L2_BUF_CAP_SUPPORTS_MMAP (1 << 0) /* 支持通过内存映射 (mmap) 访问缓冲区
这种方式允许用户进程直接访问内核分配的缓冲区数据,减少数据拷贝,适用于高效的数据传输。
使用场景:视频捕获设备或高效数据流处理*/
#define V4L2_BUF_CAP_SUPPORTS_USERPTR (1 << 1) /* 支持通过用户指针 (user pointer)
访问缓冲区;用户进程可以提供缓冲区地址给驱动,驱动直接使用用户空间缓冲区进行数据存储或传输。
使用场景:用户希望管理缓冲区内存的分配和生命周期。*/
#define V4L2_BUF_CAP_SUPPORTS_DMABUF (1 << 2) /* 支持通过 DMA 缓冲区 (DMA buffer)
访问缓冲区;设备之间可以直接通过共享 DMA 缓冲区传递数据,避免数据复制。
使用场景:硬件加速视频处理或跨设备数据传输*/
#define V4L2_BUF_CAP_SUPPORTS_REQUESTS (1 << 3) /* 支持缓冲区请求 API,用于媒体请求
(media requests);该标志表明缓冲区支持基于请求的 API,可以与其他媒体设备同步,
例如用于复杂的视频流处理。使用场景媒体框架中需要更复杂的请求-响应机制,例如视频解码场景 */4、struct v4l2_buffer结构体:
/**
* struct v4l2_buffer - 视频缓冲区信息
*
* 此结构体用于描述缓冲区的信息,并在应用程序和驱动之间交换数据。
* 可用于单平面缓冲区和多平面缓冲区,根据 `type` 的值区分。
*
* @index: 缓冲区的索引(从 0 开始)。
* @type: 缓冲区类型,使用枚举 `enum v4l2_buf_type`,如:
* - V4L2_BUF_TYPE_VIDEO_CAPTURE:单平面视频捕获缓冲区
* - V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE:多平面视频捕获缓冲区
* @bytesused: 缓冲区中已用的字节数(有效载荷大小),
* 对于多平面缓冲区,此字段设置为 0。
* @flags: 缓冲区标志信息,指示缓冲区的状态(如是否已填充)。
* @field: 图像的场顺序,使用枚举 `enum v4l2_field`。
* @timestamp: 帧的时间戳,表示捕获或输出的时间。
* @timecode: 帧的时间码信息。
* @sequence: 帧的序列号,用于标识帧的顺序。
* @memory: 缓冲区的内存类型,使用枚举 `enum v4l2_memory`。
* @offset: 当缓冲区为单平面,且内存类型为 V4L2_MEMORY_MMAP 时,
* 表示设备内存的偏移量。
* @userptr: 当缓冲区为单平面,且内存类型为 V4L2_MEMORY_USERPTR 时,
* 表示用户空间指针。
* @fd: 当缓冲区为单平面,且内存类型为 V4L2_MEMORY_DMABUF 时,
* 表示 DMA 缓冲区的文件描述符。
* @planes: 当缓冲区为多平面时,指向包含平面信息的数组。
* @length: 单平面缓冲区的总大小(字节);对于多平面缓冲区,表示平面数组的元素数量。
* @request_fd: 缓冲区关联的请求文件描述符,用于请求 API。
* @reserved2: 保留字段,用于未来扩展。
*/
struct v4l2_buffer {
__u32 index; /* 缓冲区索引 */
__u32 type; /* 缓冲区类型 */
__u32 bytesused; /* 有效载荷大小 */
__u32 flags; /* 缓冲区标志 */
__u32 field; /* 图像场顺序 */
struct timeval timestamp; /* 时间戳 */
struct v4l2_timecode timecode; /* 时间码 */
__u32 sequence; /* 帧序列号 */
/* 内存位置 */
__u32 memory; /* 内存类型 */
union {
__u32 offset; /* 单平面映射偏移量 */
unsigned long userptr; /* 单平面用户指针 */
struct v4l2_plane *planes; /* 多平面信息指针 */
__s32 fd; /* 单平面 DMA 缓冲区文件描述符 */
} m;
__u32 length; /* 缓冲区大小或平面数组元素数量 */
__u32 reserved2; /* 保留字段 */
union {
__s32 request_fd; /* 请求文件描述符 */
__u32 reserved; /* 保留字段 */
};
};flags的标识如下:
/* 'flags' 字段的标志位定义 */
/* 缓冲区已映射到用户空间(内存映射) */
#define V4L2_BUF_FLAG_MAPPED 0x00000001
/* 缓冲区已加入队列,等待处理 */
#define V4L2_BUF_FLAG_QUEUED 0x00000002
/* 缓冲区已处理完成,数据准备好 */
#define V4L2_BUF_FLAG_DONE 0x00000004
/* 图像是关键帧(I 帧) */
#define V4L2_BUF_FLAG_KEYFRAME 0x00000008
/* 图像是预测帧(P 帧) */
#define V4L2_BUF_FLAG_PFRAME 0x00000010
/* 图像是双向预测帧(B 帧) */
#define V4L2_BUF_FLAG_BFRAME 0x00000020
/* 缓冲区准备好,但数据存在损坏 */
#define V4L2_BUF_FLAG_ERROR 0x00000040
/* 缓冲区已添加到未排队的请求中 */
#define V4L2_BUF_FLAG_IN_REQUEST 0x00000080
/* timecode 字段有效 */
#define V4L2_BUF_FLAG_TIMECODE 0x00000100
/* 缓冲区已准备好入队 */
#define V4L2_BUF_FLAG_PREPARED 0x00000400
/* 缓存处理标志 */
/* 禁止无效缓存 */
#define V4L2_BUF_FLAG_NO_CACHE_INVALIDATE 0x00000800
/* 禁止清理缓存 */
#define V4L2_BUF_FLAG_NO_CACHE_CLEAN 0x00001000
/* 时间戳类型标志 */
/* 时间戳掩码 */
#define V4L2_BUF_FLAG_TIMESTAMP_MASK 0x0000e000
/* 时间戳未知 */
#define V4L2_BUF_FLAG_TIMESTAMP_UNKNOWN 0x00000000
/* 使用单调时间戳 */
#define V4L2_BUF_FLAG_TIMESTAMP_MONOTONIC 0x00002000
/* 复制的时间戳 */
#define V4L2_BUF_FLAG_TIMESTAMP_COPY 0x00004000
/* 时间戳来源标志 */
/* 时间戳来源掩码 */
#define V4L2_BUF_FLAG_TSTAMP_SRC_MASK 0x00070000
/* 时间戳来源于帧结束 (EOF) */
#define V4L2_BUF_FLAG_TSTAMP_SRC_EOF 0x00000000
/* 时间戳来源于帧开始 (SOE) */
#define V4L2_BUF_FLAG_TSTAMP_SRC_SOE 0x00010000
/* 内存到内存编码器/解码器 */
/* 表示最后一个缓冲区 */
#define V4L2_BUF_FLAG_LAST 0x00100000
/* request_fd 字段有效 */
#define V4L2_BUF_FLAG_REQUEST_FD 0x008000005、v4l2_buf_type枚举:

c
复制代码
/**
* enum v4l2_buf_type - 缓冲区类型枚举
*
* 该枚举定义了 V4L2 中缓冲区的数据流类型,用于指定设备支持的数据传输类型。
* 不同类型表示设备处理的视频、音频或元数据流方式,应用程序在使用缓冲区时需要根据实际用途设置该字段。
*
* @V4L2_BUF_TYPE_VIDEO_CAPTURE: 视频捕获类型,设备从输入源(如摄像头)捕获视频帧。
* @V4L2_BUF_TYPE_VIDEO_OUTPUT: 视频输出类型,设备将视频帧发送到输出端(如显示器)。
* @V4L2_BUF_TYPE_VIDEO_OVERLAY: 视频叠加类型,用于处理叠加在输出视频上的额外图像。
* @V4L2_BUF_TYPE_VBI_CAPTURE: 垂直消隐间隔(VBI)捕获,用于捕获原始 VBI 数据。
* @V4L2_BUF_TYPE_VBI_OUTPUT: 垂直消隐间隔(VBI)输出,用于输出原始 VBI 数据。
* @V4L2_BUF_TYPE_SLICED_VBI_CAPTURE: 分片 VBI 捕获,捕获处理后的 VBI 数据片段。
* @V4L2_BUF_TYPE_SLICED_VBI_OUTPUT: 分片 VBI 输出,输出处理后的 VBI 数据片段。
* @V4L2_BUF_TYPE_VIDEO_OUTPUT_OVERLAY: 视频输出叠加,用于向输出流添加叠加图像。
* @V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE: 多平面视频捕获,支持多平面存储格式的视频捕获。
* @V4L2_BUF_TYPE_VIDEO_OUTPUT_MPLANE: 多平面视频输出,支持多平面存储格式的视频输出。
* @V4L2_BUF_TYPE_SDR_CAPTURE: 软件定义无线电(SDR)捕获,用于捕获 SDR 数据流。
* @V4L2_BUF_TYPE_SDR_OUTPUT: 软件定义无线电(SDR)输出,用于输出 SDR 数据流。
* @V4L2_BUF_TYPE_META_CAPTURE: 元数据捕获,用于捕获非视频/音频数据的元信息。
* @V4L2_BUF_TYPE_PRIVATE: **已废弃**,不要使用。
*/
enum v4l2_buf_type {
V4L2_BUF_TYPE_VIDEO_CAPTURE = 1, /* 视频捕获 */
V4L2_BUF_TYPE_VIDEO_OUTPUT = 2, /* 视频输出 */
V4L2_BUF_TYPE_VIDEO_OVERLAY = 3, /* 视频叠加 */
V4L2_BUF_TYPE_VBI_CAPTURE = 4, /* VBI 捕获 */
V4L2_BUF_TYPE_VBI_OUTPUT = 5, /* VBI 输出 */
V4L2_BUF_TYPE_SLICED_VBI_CAPTURE = 6, /* 分片 VBI 捕获 */
V4L2_BUF_TYPE_SLICED_VBI_OUTPUT = 7, /* 分片 VBI 输出 */
V4L2_BUF_TYPE_VIDEO_OUTPUT_OVERLAY = 8, /* 视频输出叠加 */
V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE = 9, /* 多平面视频捕获 */
V4L2_BUF_TYPE_VIDEO_OUTPUT_MPLANE = 10, /* 多平面视频输出 */
V4L2_BUF_TYPE_SDR_CAPTURE = 11, /* SDR 捕获 */
V4L2_BUF_TYPE_SDR_OUTPUT = 12, /* SDR 输出 */
V4L2_BUF_TYPE_META_CAPTURE = 13, /* 元数据捕获 */
/* 已废弃,请勿使用 */
V4L2_BUF_TYPE_PRIVATE = 0x80,
};还有一些结构体还没分析到,到时候我们在分析源码的时候遇到了,再进行解析。
总结
今天的内容就分享到这里,下期内容我们继续解读摄像头怎么获取实时码流实现原理,我们下期见!