欢迎关注『youcans动手学模型』系列
本专栏内容和资源同步到 GitHub/youcans
【YOLO 项目实战】(1)YOLO5 环境配置与检测
【YOLO 项目实战】(10)YOLO8 环境配置与推理检测
【YOLO 项目实战】(11)YOLO8 数据集与模型训练
【YOLO5 项目实战】(11)YOLO8 数据集与模型训练
- 1. 准备训练数据集
- 1.1 YOLOv8 数据集的格式
- 1.2 下载 YOLOv8 数据集
- 1.3 整理 YOLOv8 数据集
- 3. YOLOv8 自定义数据集的训练
- 3.1 下载 YOLOv8 预训练模型
- 3.2 命令行(CLI)接口的模型训练
- 3.3 使用 Python 接口的模型推理
- 3.4 模型训练参数说明
- 3.5 训练结果文件说明
- 4. 模型验证与模型预测
- 4.1 模型验证
- 4.2 模型预测
上节介绍了 YOLOv8 的下载、配置和推理,本节介绍用本地数据集训练 YOLOv8 模型,建立特定任务的私有模型。
创建自定义模型来检测对象是一个迭代过程,包括收集和组织图像、标注对象、训练模型、模型部署,使用部署的模型进行推理。
1. 准备训练数据集
YOLOv8 项目中提供了不同数据集转换的指南和例程,位于 “.\docs\en\datasets” 路径,例如在文件 coco.md 中介绍了使用 COCO 数据集来训练 YOLOv8 目标检测模型。

1.1 YOLOv8 数据集的格式
- 数据集的组织
YOLOv8数据集通常包含图像文件和标注文件。图像文件通常是 jpg、png 等图像格式,包含了待检测的目标。标注文件则是包含每张图像中目标对象的类别和位置信息的文本文件。
YOLOv8 默认使用 COCO2017 数据集进行训练,结构如下。
- images 下包含 train、val 文件夹,这两个文件夹下包含此次需要的 图片信息
- labels 下包含 train、val 文件夹,这两个文件夹下包含此次需要的 对应图片的标注信息
- test_images 下包含的是提供测试的数据集
dataset
├── images
│ ├── train
│ ├── val
│ ├── test (option)
├── labels
│ ├── train
│ ├── val
│ ├── test (option)
- 标注文件的格式
YOLO格式的标注文件通常是一个文本文件,每一行代表一个目标物体的标注信息。
标注信息通常包含类别编号、目标中心横坐标(相对于图像宽度)、目标中心纵坐标(相对于图像高度)、目标宽度(相对于图像宽度)和目标高度(相对于图像高度),具体格式如下:
<object-class-id> <x> <y> <width> <height>
其中:
<object-class-id>是目标对象的类别编号,整数表示。
<x>和<y>是目标中心位置的坐标,经过归一化处理(即目标的真实x、y值除以图像的宽度和高度),是小于1的浮点数。
<width>和<height>是目标的宽度和高度(同样经过归一化处理),也是小于1的浮点数。
例如,一行标注信息为 “0 0.5 0.6 0.3 0.4”,其中“0”表示类别编号,后面的数字表示目标在图像中的位置和大小信息。
1.2 下载 YOLOv8 数据集
Roboflow Annotate是一个简单的基于网络的工具,用于管理和标记用户的图像集,并以YOLO的注释格式导出。无论是否使用 Roboflow 标记图像,都可以使用它将数据集转换为YOLO格式,创建YOLOv8 YAML配置文件,并将其托管以导入训练脚本。
- 打开 Roboflow 网站,从Roboflow 公开数据集中选择一个数据集,下载到本地。
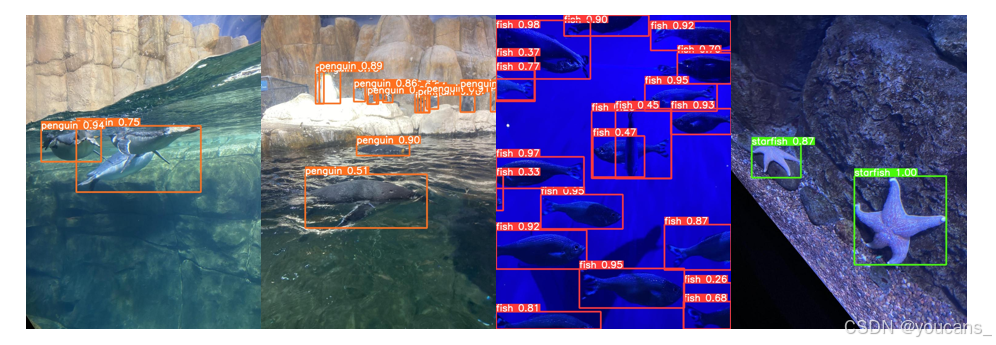
本文选择 “水族馆数据集(Aquarium Dataset)”。该数据集由 Roboflow 从美国两个水族馆收集的 638 张图像组成:Henry Doorly Zoo 和 National Aquarium in Baltimore。Roboflow对这些图像进行了标记,以便进行物体检测。图像和注释在知识共享署名许可下发布。
该数据集标记了 7 个类别:鱼类(fish)、水母(jellyfish)、企鹅(penguins)、鲨鱼(sharks)、海雀(puffins)、黄貂鱼(stingrays)和海星(starfish)。大多数图像包含多个边界框。
- Roboflow 提供了多种下载格式,主要是数据集组织和标注格式的区别。注意要以YOLOv8 格式导出,如下图所示。

选择 YOLOv8格式,下载 水族馆数据集(Aquarium Dataset)。

- 下载后将数据集解压缩。
下载 Aquarium 数据集的文件路径如下:
- Dataset_Aquarium
- test
- images
- labels
- train
- images
- labels
- valid
- images
- labels
- data.yaml
下载的 Aquarium 数据集设有 test,train,valid 三个文件夹,分别用作测试、训练和检验,每个文件夹下设有 images,labels 两个文件夹,分别保存图像文件和标注文件。
一个典型的标注文件的内容如下。共有 3行,每行表示一个检测目标。每行有 5个参数,第1列是类别标签(Yes/No),后 4个参数是 BoundingBox 的坐标位置。
0 0.31875 0.5976190476190476 0.05583333333333333 0.13174603174603175
0 0.31916666666666665 0.2912698412698413 0.12833333333333333 0.3253968253968254
0 0.5270833333333333 0.16746031746031745 0.12416666666666666 0.2841269841269841
如果自己收集和标注数据集,也要按照以上格式来组织数据集和标注文件。
- 数据集配置文件 .yaml
数据集配置文件中给出了数据集的路径,训练集、检验集和验证集的路径,分类任务的类别数量 nc 和类名列表 names。
Aquarium Dataset 数据集配置文件 data.yaml 位于数据集的根目录,内容如下:
train: ../train/images
val: ../valid/images
test: ../test/images
nc: 7
names: ['fish', 'jellyfish', 'penguin', 'puffin', 'shark', 'starfish', 'stingray']
其中,train 表示训练集图像文件夹的路径,val 表示验证集图像文件夹的路径,test 表示测试集图像文件夹的路径。nc:7 表示类别数为 7,names 表示类别名。
注意,nc 是由数据集的标注内容决定的,不能自行修改。
1.3 整理 YOLOv8 数据集
YOLOv8 模型训练对于格式的要求非常严格:数据集要保存在项目的指定路径 datasets 下,并按照
- 数据集要保存在项目的指定路径 datasets 下,并按下面的格式组织样本图片和标签。
- yolov8
- datasets
- Aquarium
- images
- test
- train
- val
- labels
- test
- train
- val
- dataAquarium.yaml
- ultralytics
- yolov8n.pt
- 编写数据集配置文件 YAML 文件( .yaml)。
YOLO 模型训练时,要调用数据集配置文件 YAML 文件( .yaml),指定数据集的路径和分类类别。
在 YOLOv8 项目中,提供了多个数据集配置文件,例如:“\YOLOv8\ultralytics\cfg\datasets\coco8.yaml” 可供参考。根据Aquarium Dataset 数据集配置文件 data.yaml ,编写本项目的数据集配置文件 dataAquarium.yaml,保存到数据集的根目录,内容如下。
# Ultralytics YOLO 🚀, AGPL-3.0 license
# Aquarium dataset
# parent
# ├── ultralytics
# └── datasets
# └── Aquarium
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: Aquarium # dataset root dir
train: images/train # train images (relative to 'path')
val: images/val # val images (relative to 'path')
test: # test images (optional)
# Classes
names:
0: fish
1: jellyfish
2: penguin
3: puffin
4: shark
5: starfish
6: stingray
3. YOLOv8 自定义数据集的训练
3.1 下载 YOLOv8 预训练模型
在 YOLO/GitHub 项目仓,提供了检测(Detection)、分类(Classification)、分割(Segmentation)、姿态估计(Pose)、定向边界框检测(OBB)等任务的预训练模型。YOLOv8 有多个不同规模的模型,从小到大依次是:YOLOv8n、YOLOv8s、YOLOv8m、YOLOv8l、YOLOv8x。这些模型与各种操作模式兼容,包括推理、验证、训练和导出,便于在部署和开发的不同阶段使用。
由于 YOLO 更新频繁,预训练模型的入口不容易找,现将下载地址列表如下。
https://github.com/ultralytics/assets/releases/download/v8.2.0/yolov8n-pose.pt
https://github.com/ultralytics/assets/releases/download/v8.2.0/yolov8s-pose.pt
https://github.com/ultralytics/assets/releases/download/v8.2.0/yolov8m-pose.pt
https://github.com/ultralytics/assets/releases/download/v8.2.0/yolov8l-pose.pt
https://github.com/ultralytics/assets/releases/download/v8.2.0/yolov8x-pose.pt
https://github.com/ultralytics/assets/releases/download/v8.2.0/yolov8n-seg.pt
https://github.com/ultralytics/assets/releases/download/v8.2.0/yolov8s-seg.pt
https://github.com/ultralytics/assets/releases/download/v8.2.0/yolov8m-seg.pt
https://github.com/ultralytics/assets/releases/download/v8.2.0/yolov8l-seg.pt
https://github.com/ultralytics/assets/releases/download/v8.2.0/yolov8x-seg.pt
https://github.com/ultralytics/assets/releases/download/v8.2.0/yolov8n-cls.pt
https://github.com/ultralytics/assets/releases/download/v8.2.0/yolov8s-cls.pt
https://github.com/ultralytics/assets/releases/download/v8.2.0/yolov8m-cls.pt
https://github.com/ultralytics/assets/releases/download/v8.2.0/yolov8l-cls.pt
https://github.com/ultralytics/assets/releases/download/v8.2.0/yolov8x-cls.pt
https://github.com/ultralytics/assets/releases/download/v8.2.0/yolov8n.pt
https://github.com/ultralytics/assets/releases/download/v8.2.0/yolov8s.pt
https://github.com/ultralytics/assets/releases/download/v8.2.0/yolov8m.pt
https://github.com/ultralytics/assets/releases/download/v8.2.0/yolov8l.pt
https://github.com/ultralytics/assets/releases/download/v8.2.0/yolov8x.pt
https://github.com/ultralytics/assets/releases/download/v8.2.0/yolov8n-obb.pt
https://github.com/ultralytics/assets/releases/download/v8.2.0/yolov8s-obb.pt
https://github.com/ultralytics/assets/releases/download/v8.2.0/yolov8m-obb.pt
https://github.com/ultralytics/assets/releases/download/v8.2.0/yolov8l-obb.pt
https://github.com/ultralytics/assets/releases/download/v8.2.0/yolov8x-obb.pt
本文选择 YOLOv8n,参数约 6M。下载完成后,将下载的预训练模型文件 yolov8n.pt 放在 YOLOv8 项目的根目录路径下,例如 “C:\Python\PythonProjects\YOLOv8”。
3.2 命令行(CLI)接口的模型训练
YOLOv8 支持使用命令行接口(command line interface, CLI)对模型进行训练、验证或运行推断。
YOLOv8 命令行接口(CLI)方便在各种任务和版本上训练、验证或推断模型,不需要定制或代码,可以使用 yolo 命令从终端运行所有任务。
语法:
yolo task=detect mode=train model=yolov8n.yaml args...
classify predict yolov8n-cls.yaml args...
segment val yolov8n-seg.yaml args...
export yolov8n.pt format=onnx args...
使用 Aquarium 数据集进行模型训练的具体操作步骤如下:
- 使用 miniconda Prompt 命令行,或使用 PyCharm 的命令行窗口;
- 激活 YOLO8 虚拟环境;
- 输入如下命令就可以进行模型训练。注意其中的 model 和 data 的文件路径与用户的具体设置有关。
conda activate yolo8
yolo task=detect mode=train model=./yolov8n.pt data=./datasets/Aquarium/dataAquarium.yaml epochs=10 workers=1 batch=16
注意:
(1)必须先激活 YOLO 虚拟环境。
(2)当前路径必须是 YOLOv8 项目所在的目录,例如 “C:\Python\PythonProjects\YOLOv8”。
(3)预训练模型 yolov8n.pt 必须保存在模型配置参数 “model” 指定的路径。例如,如果预训练模型保存在 “C:\Python|PythonProjects\YOLOv8\model\yolov8n.pt”,则将模型配置参数修改为 “model=.\model\yolov8n.pt”。
(4)训练好的模型及训练日志保存在 “.\runs\detect\train” 目录下。
运行结果如下。
(base) C:\Python\PythonProjects\YOLOv8>conda activate yolo8
(yolo8) C:\Python\PythonProjects\YOLOv8>yolo task=detect mode=train model=./yolov8n.pt data=./datasets/Aquarium/dataAquarium.yaml epochs=10 workers=1 batch=16
Ultralytics YOLOv8.1.0 🚀 Python-3.8.20 torch-2.4.1+cu121 CUDA:0 (NVIDIA GeForce RTX 3060, 12288MiB)
engine\trainer: task=detect, mode=train, model=./yolov8n.pt, data=./datasets/Aquarium/dataAquarium.yaml, epochs=10, time=None, patience=50, batch=16, imgsz=640, save=True, save_period=-1, cache=False, device=None, workers=1, project=None, name=train4, exist_ok=False, pretrained=True, optimizer=auto, verbose=True, seed=0, deterministic=True, single_cls=False, rect=False, cos_lr=False, close_mosaic=10, resume=False, amp=True, fraction=1.0, profi
le=False, freeze=None, multi_scale=False, overlap_mask=True, mask_ratio=4, dropout=0.0, val=True, split=val, save_json=False, save_hybrid=False, conf=None, iou=0.7, max_det=300, half=False, dnn=False, plots=True, source=None, vid_stride=1, stream_buffer=False, visualize=False, augment=False, agnostic_nms=False, classes=None, retina_masks=False, embed=None, show=False, save_frames=False, save_txt=False, save_conf=False, save_crop=False, show_labels=True, show_conf=True, show_boxes=True, line_width=None, format=torchscript, keras=False, optimize=False, int8=False, dynamic=False, simplify=False, opset=None, workspace=4, nms=False, lr0=0.01, lrf=0.01, momentum=0.937, weight_decay=0.0005, warmup_epochs=3.0, warmup_momentum=0.8, warmup_bias_lr=0.1, box=7.5, cls=0.5, dfl=1.5, pose=12.0, kobj=1.0, label_smoothing=0.0, nbs=64, hsv_h=0.015, hsv_s=0.7, hsv_v=0.4, degrees=0.0, translate=0.1, scale=0.5, shear=0.0, perspective=0.0, flipud=0.0, fliplr=0.5, mosaic=1.0, mixup=0.0, copy_paste=0.0, auto_augment=randaugment, erasing=0.4, crop_fraction=1.0, cfg=None, tracker=botsort.yaml, save_dir=runs\detect\train4
Overriding model.yaml nc=80 with nc=7
from n params module arguments
0 -1 1 464 ultralytics.nn.modules.conv.Conv [3, 16, 3, 2]
1 -1 1 4672 ultralytics.nn.modules.conv.Conv [16, 32, 3, 2]
2 -1 1 7360 ultralytics.nn.modules.block.C2f [32, 32, 1, True]
3 -1 1 18560 ultralytics.nn.modules.conv.Conv [32, 64, 3, 2]
4 -1 2 49664 ultralytics.nn.modules.block.C2f [64, 64, 2, True]
5 -1 1 73984 ultralytics.nn.modules.conv.Conv [64, 128, 3, 2]
6 -1 2 197632 ultralytics.nn.modules.block.C2f [128, 128, 2, True]
7 -1 1 295424 ultralytics.nn.modules.conv.Conv [128, 256, 3, 2]
8 -1 1 460288 ultralytics.nn.modules.block.C2f [256, 256, 1, True]
9 -1 1 164608 ultralytics.nn.modules.block.SPPF [256, 256, 5]
10 -1 1 0 torch.nn.modules.upsampling.Upsample [None, 2, 'nearest']
11 [-1, 6] 1 0 ultralytics.nn.modules.conv.Concat [1]
12 -1 1 148224 ultralytics.nn.modules.block.C2f [384, 128, 1]
13 -1 1 0 torch.nn.modules.upsampling.Upsample [None, 2, 'nearest']
14 [-1, 4] 1 0 ultralytics.nn.modules.conv.Concat [1]
15 -1 1 37248 ultralytics.nn.modules.block.C2f [192, 64, 1]
16 -1 1 36992 ultralytics.nn.modules.conv.Conv [64, 64, 3, 2]
17 [-1, 12] 1 0 ultralytics.nn.modules.conv.Concat [1]
18 -1 1 123648 ultralytics.nn.modules.block.C2f [192, 128, 1]
19 -1 1 147712 ultralytics.nn.modules.conv.Conv [128, 128, 3, 2]
20 [-1, 9] 1 0 ultralytics.nn.modules.conv.Concat [1]
21 -1 1 493056 ultralytics.nn.modules.block.C2f [384, 256, 1]
22 [15, 18, 21] 1 752677 ultralytics.nn.modules.head.Detect [7, [64, 128, 256]]
Model summary: 225 layers, 3012213 parameters, 3012197 gradients, 8.2 GFLOPs
Transferred 319/355 items from pretrained weights
Freezing layer 'model.22.dfl.conv.weight'
train: Scanning C:\Python\PythonProjects\YOLOv8\datasets\Aquarium\labels\train.cache... 448 images, 1 backgrounds, 0 corrupt: 100%|██████████| 448/4
val: Scanning C:\Python\PythonProjects\YOLOv8\datasets\Aquarium\labels\val.cache... 127 images, 0 backgrounds, 0 corrupt: 100%|██████████| 127/127 [
Plotting labels to runs\detect\train4\labels.jpg...
optimizer: 'optimizer=auto' found, ignoring 'lr0=0.01' and 'momentum=0.937' and determining best 'optimizer', 'lr0' and 'momentum' automatically...
optimizer: AdamW(lr=0.000909, momentum=0.9) with parameter groups 57 weight(decay=0.0), 64 weight(decay=0.0005), 63 bias(decay=0.0)
10 epochs...
Closing dataloader mosaic
Epoch GPU_mem box_loss cls_loss dfl_loss Instances Size
1/10 2.55G 1.545 3.855 1.274 130 640: 100%|██████████| 28/28 [00:05<00:00, 4.79it/s]
Class Images Instances Box(P R mAP50 mAP50-95): 100%|██████████| 4/4 [00:00<00:00, 5.93it/s]
all 127 909 0.0114 0.505 0.0551 0.029
...
Epoch GPU_mem box_loss cls_loss dfl_loss Instances Size
10/10 2.53G 1.367 1.593 1.156 116 640: 100%|██████████| 28/28 [00:05<00:00, 5.30it/s]
Class Images Instances Box(P R mAP50 mAP50-95): 100%|██████████| 4/4 [00:00<00:00, 5.98it/s]
all 127 909 0.688 0.594 0.629 0.365
10 epochs completed in 0.018 hours.
Optimizer stripped from runs\detect\train4\weights\last.pt, 6.2MB
Optimizer stripped from runs\detect\train4\weights\best.pt, 6.2MB
Validating runs\detect\train4\weights\best.pt...
Ultralytics YOLOv8.1.0 🚀 Python-3.8.20 torch-2.4.1+cu121 CUDA:0 (NVIDIA GeForce RTX 3060, 12288MiB)
Model summary (fused): 168 layers, 3007013 parameters, 0 gradients, 8.1 GFLOPs
Class Images Instances Box(P R mAP50 mAP50-95): 100%|██████████| 4/4 [00:01<00:00, 3.34it/s]
all 127 909 0.692 0.597 0.634 0.365
fish 127 459 0.762 0.61 0.709 0.381
jellyfish 127 155 0.687 0.836 0.817 0.437
penguin 127 104 0.489 0.76 0.647 0.275
puffin 127 74 0.578 0.338 0.371 0.17
shark 127 57 0.63 0.579 0.593 0.351
starfish 127 27 0.914 0.393 0.57 0.45
stingray 127 33 0.786 0.667 0.732 0.495
Speed: 0.1ms preprocess, 1.6ms inference, 0.0ms loss, 2.5ms postprocess per image
Results saved to runs\detect\train
💡 Learn more at https://docs.ultralytics.com/modes/train

3.3 使用 Python 接口的模型推理
YOLOv8 也提供了 Python 接口的调用方式。它提供了加载和运行模型以及处理模型输出的函数。该界面设计易于使用,以便用户可以在他们的项目中快速实现目标检测。
使用 Aquarium 数据集进行模型训练的 Python 参考例程如下。
from ultralytics import YOLO
if __name__ == '__main__':
# 创建 YOLO 模型对象,加载指定的模型配置
model = YOLO('./ultralytics/cfg/models/v8/yolov8.yaml')
# 加载预训练的权重文件,加速训练并提升模型性能
model.load('yolov8n.pt')
# 用指定数据集训练模型
model.train(data="./datasets/Aquarium/dataAquarium.yaml", # 指定训练数据集的配置文件路径
cache=False, # 是否缓存数据集以加快后续训练速度
imgsz=640, # 指定训练时使用的图像尺寸
epochs=100, # 设置训练的总轮数为100轮
batch=16, # 设置每个训练批次的大小为16
close_mosaic=10, # 设置在训练的最后 10 轮中关闭 Mosaic 数据增强
workers=4, # 设置用于数据加载的线程数为4
device='0', # 指定使用的 GPU 设备
optimizer='SGD' # 设置优化器为SGD(随机梯度下降)
)
注意:
(1)使用项目默认路径自带的模型配置文件 “./ultralytics/cfg/models/v8/yolov8.yaml” 。
(2)训练数据集的配置文件路径为 “./datasets/Aquarium/dataAquarium.yaml”。
(3)训练好的模型及训练日志保存在 “./runs/detect/train” 目录下。
在 PyCharm 编译并运行程序,就实现对 Aquarium 数据集进行模型训练,并将训练结果保存到 “./runs/detect/train/weights/best.py”。




3.4 模型训练参数说明
YOLOv8 在默认配置文件 “./ultralytics/cfg/default.yaml” 中给出了模型训练参数的说明。
| 参数 | 默认值 | 描述 | 设置建议 |
|---|---|---|---|
| model | None | 模型文件路径,如 yolov8n.pt, yolov8n.yaml | 根据需要选择合适的预训练模型文件 |
| data | None | 数据文件路径,如 coco128.yaml | 选择合适的数据集配置文件 |
| epochs | 100 | 训练的周期数 | 根据数据集大小和模型复杂度调整 |
| time | None | 训练时间(小时),如果提供,将覆盖epochs参数 | 根据实际训练时间需求设置 |
| patience | 50 | 早停的周期数,等待无显著改进的周期数 | 根据模型训练动态调整 |
| batch | 16 | 每个批次的图像数量 | 根据硬件资源调整 |
| imgsz | 640 | 输入图像的尺寸 | 根据硬件和模型性能要求调整 |
| save | True | 是否保存训练检查点和预测结果 | 通常保持默认 |
| save_period | -1 | 每x周期保存检查点,如果<1则禁用 | 根据需要设置 |
| cache | False | 是否使用数据加载缓存,选项:True/ram, disk 或 False | 根据硬件资源和数据集大小决定 |
| device | None | 运行设备,如 cuda device=0 或 device=cpu | 根据可用的硬件资源设置 |
| workers | 8 | 数据加载的工作线程数 | 根据系统资源调整 |
| project | None | 项目名称 | 根据需要自定义 |
| name | None | 实验名称 | 自定义实验名以便识别 |
| exist_ok | False | 是否覆盖现有实验 | 如果需要重复实验,设置为True |
| pretrained | True | 是否使用预训练模型 | 通常对于新的训练任务保持True |
| optimizer | ‘auto’ | 优化器,可选项:SGD, Adam等 | 根据模型和数据集特性选择合适的优化器 |
| verbose | False | 是否打印详细输出 | 开发和调试时可设为True |
| seed | 0 | 重现性的随机种子 | 需要重现结果时设置确定值 |
| deterministic | True | 是否启用确定性模式 | 需要确保结果一致性时设置为True |
| single_cls | False | 是否将多类数据作为单类训练 | 特定应用场景下调整 |
| rect | False | 矩形训练,每个批次为最小填充 | 特定应用场景下调整 |
| cos_lr | False | 是否使用余弦学习率调度器 | 根据训练策略调整 |
| close_mosaic | 10 | 关闭马赛克增强的最后周期数 | 根据训练需求调整 |
| resume | False | 从最后检查点恢复训练 | 需要从中断的训练继续时设置为True |
| amp | True | 是否使用自动混合精度训练 | 根据硬件支持选择 |
| fraction | 1.0 | 训练的数据集比例 | 如需使用数据集的子集进行训练,调整此值 |
| profile | False | 训练期间记录ONNX和TensorRT速度 | 性能分析时启用 |
| freeze | None | 冻结训练期间的前n层或特定层 | 特定模型调整时使用 |
| lr0 | 0.01 | 初始学习率 | 根据模型和数据集特性调整 |
| lrf | 0.01 | 最终学习率 | 根据训练策略调整 |
| momentum | 0.937 | SGD动量/Adam beta1 | 根据优化器类型调整 |
| weight_decay | 0.0005 | 优化器权重衰减 | 通常保持默认值 |
| warmup_epochs | 3.0 | 热身周期数 | 根据模型特性调整 |
| warmup_momentum | 0.8 | 热身初始动量 | 根据训练策略调整 |
| warmup_bias_lr | 0.1 | 热身初始偏置学习率 | 根据训练策略调整 |
| box | 7.5 | 盒子损失增益 | 根据模型特性和训练数据调整 |
| cls | 0.5 | 类别损失增益 | 根据分类任务的复杂性调整 |
| dfl | 1.5 | DFL损失增益 | 根据具体应用调整 |
| pose | 12.0 | 姿态损失增益(仅限姿态) | 仅在姿态检测任务中使用 |
| kobj | 2.0 | 关键点目标损失增益(仅限姿态) | 仅在姿态检测任务中使用 |
| label_smoothing | 0.0 | 标签平滑(比例) | 根据训练策略调整 |
| nbs | 64 | 标称批量大小 | 根据硬件资源调整 |
| overlap_mask | True | 掩码在训练期间是否重叠(仅限分割训练) | 仅在分割任务中使用 |
| mask_ratio | 4 | 掩码下采样比例(仅限分割训练) | 仅在分割任务中使用 |
| dropout | 0.0 | 使用dropout正则化(仅限分类训练) | 仅在分类任务中使用 |
| val | True | 训练期间进行验证/测试 | 通常保持默认 |
| plots | False | 训练/验证期间保存图表和图像 | 需要可视化训练过程时设置为True |
3.5 训练结果文件说明
训练日志的图表对于评估和理解模型的性能非常重要,可以帮助我们分析模型的优势和弱点。
- weights 文件夹
- best.pt:损失值最小的模型文件
- last.pt:训练到最后的模型文件
- args.yaml:模型训练的配置参数
- confusion_matrix.png:混淆矩阵,展示了分类模型的性能。
每一行代表模型预测的类别,每一列代表实际的类别。对角线上的数值表示模型正确预测的数量。对角线上较深的颜色表示该类别预测正确的数量较多。 - confusion_matrix_normalized.png:标准化混淆矩阵,显示每个类别的预测正确比例。
- F1_curve.png:F1-置信度曲线,显示了F1得分随着置信度阈值的变化。
F1得分是精确度和召回率的调和平均值,曲线的峰值表示给定置信度阈值下精确度和召回率的最佳平衡点。 - labels.jpg:标签分布图和边界框分布图。
柱状图显示了不同类别的实例分布数量。散点图则展示了目标检测任务中边界框的空间分布情况,反映了常见的尺寸和长宽比。 - labels_correlogram.jpg:标签相关图
相关图提供了不同类别标签之间的关系,以及它们在图像中位置的相关性。这有助于理解模型在识别不同类别时可能出现的关联或混淆。 - P_curve.png:精确度-置信度曲线,展示了模型预测的精确度随着置信度阈值的变化。
精确度是模型预测正确正例与预测为正例总数的比值。 - PR_curve.png:精确度-召回曲线,展示了模型的精确度与召回率之间的关系。
理想情况下,模型应在精确度和召回率之间保持良好的平衡。 - R_curve.png:召回-置信度曲线,显示了模型的召回率随置信度阈值的变化。
召回率是模型正确预测的正例与实际正例总数的比值。 - results.png 和 results.csv:训练结果图表和数据
展示了模型在训练过程中的性能变化,包括损失函数的变化和评估指标(如精确度、召回率和mAP)的变化。
4. 模型验证与模型预测
4.1 模型验证
训练后验证。
- 将训练好的模型 best.pt 保存在项目的根目录,并改名为 “yolov8nAquarium.pt”。
- 模型验证程序如下。
from ultralytics import YOLO
if __name__ == '__main__':
# 读取模型,传入训练好的模型
model = YOLO('yolov8nAquarium.pt')
# 验证模型
metrics = model.val() # 无需参数,使用 best.pt中的配置文件
- 运行模型验证程序,结果保存在 “.\runs\detect\val” 文件夹。
C:\Users\Administrator\.conda\envs\yolo8\python.exe C:\Python\PythonProjects\YOLOv8\YOLOv8_val1.py
Ultralytics YOLOv8.1.0 🚀 Python-3.8.20 torch-2.4.1+cu121 CUDA:0 (NVIDIA GeForce RTX 3060, 12288MiB)
YOLOv8 summary (fused): 168 layers, 3007013 parameters, 0 gradients, 8.1 GFLOPs
val: Scanning C:\Python\PythonProjects\YOLOv8\datasets\Aquarium\labels\val.cache... 127 images, 0 backgrounds, 0 corrupt: 100%|██████████| 127/127 [00:00<?, ?it/s]
Class Images Instances Box(P R mAP50 mAP50-95): 100%|██████████| 8/8 [00:01<00:00, 4.73it/s]
all 127 909 0.804 0.697 0.76 0.449
fish 127 459 0.804 0.721 0.81 0.449
jellyfish 127 155 0.86 0.871 0.926 0.545
penguin 127 104 0.746 0.735 0.75 0.331
puffin 127 74 0.771 0.568 0.626 0.309
shark 127 57 0.773 0.579 0.618 0.386
starfish 127 27 0.907 0.704 0.802 0.585
stingray 127 33 0.768 0.701 0.785 0.54
Speed: 1.1ms preprocess, 5.8ms inference, 0.0ms loss, 2.2ms postprocess per image
Results saved to runs\detect\val2

4.2 模型预测
训练后验证。
- 将训练好的模型 best.pt 保存在项目的根目录,并改名为 “yolov8nAquarium.pt”。
- 模型预测程序如下。
参数 source 可以是一个或多个图片文件,一个视频文件,也可以是一个文件夹,或视频采集设备。
from ultralytics import YOLO
if __name__ == '__main__':
# 读取模型,传入训练好的模型
model = YOLO('yolov8nAquarium.pt')
outputs = model.predict(source="./datasets/Aquarium/images/val", save=True) # treat predict as a Python generator
for output in outputs:
# each output here is a dict.
# for detection
print(output["det"]) # np.ndarray, (N, 6), xyxy, score, cls
- 运行模型预测程序,结果保存在 “.\runs\detect\predict” 文件夹。
【本节完】
版权声明:
欢迎关注『youcans动手学模型』系列
转发请注明原文链接:
【YOLO 项目实战】(11)YOLO8 数据集与模型训练
Copyright 2024 youcans
Crated:2024-12-20









![Vulhub:Redis[漏洞复现]](https://i-blog.csdnimg.cn/direct/e7dc0b7318124979926501e95811eaf2.png)






