智能驾驶功能分类
安全类功能
纵向
FCW/AEB
FCTA/FCTB/RCTA/RCTB
RVW/RVB
横向
ESA
LSS
LKA/LDW/ELK
盲区安全辅助
BSD
LCA
DOW
CVW
舒适功能类
纵向
ACC
CSA
TSR
ISA
横向
LCC
ILC
ALC
横纵向
TJA/HWA
NOP
泊车功能
RAP 蓝牙通信,环视+超车波
HPA 记忆泊车
APA 半自动
AVP 全自动
感知系统
单R
单V
1R1V
2R1V
3R1V
5R1V
5R:4个角雷达 1个前雷达
5R6V12U
12U:车辆前方6个,后方6个
5R11V12U
11V:4环视 4周视 前视 后视 舱内
5R13V12U
13V:4环视 4周视 3前视 后视 舱内
3 Lidar 前视
特斯拉:1R6V12U,在变化中。
执行器
VCU驱动
ESC制动
EPB
EPS 转向
角度
扭矩
BCM
HMI
控制器
MCU
Domain controller for ADAS and autonomous driving - Infineon Technologies
nxp.com.cn/applications/automotive/adas-and-highly-automated-driving/automotive-vision-systems:VISION-PROCESSING-SYSTEMS
SOC
nvidia.com/en-us/autonomous-machines/embedded-systems/jetson-orin/




传统电子电气架构
30-150个控制器
一对一通信设计
底盘 ESC EPS
动力 VCU TCU BMS MCU
网关 OBD
车身 BCM
ADAS Radar /Camera /ADAS ECU

特别多的控制器

独立的操作
复杂性和高成本
域控式电子电气架构
行驶域
座舱域
中央域控
智能驾驶域



特定应用的ECU
在域控制器中进行功能整合
1对1,”多对一“通信
中央集成式电子电气架构
EE架构从分布式向中央计算演进。当前智能汽车控制器正在从智驾域、座舱域、车身域、动力域和底盘域等五域于一体的网关时代向可能仅剩下前区、后区控制器的中央计算时代演进。
一个或两个中央计算单元
软件驱动架构
中央处理
总对多通信


华为智能驾驶系统现状
从华为发布“乾崑”来看,智驾软硬件系统在快速创新变革之中。乾崑涵盖乾崑ADS 3.0、乾崑车控、乾崑车云等解决方案,与“鸿蒙座舱”一同,作为华为智能汽车解决方案两大核心品牌。
乾崑ADS 3.0在融合感知BEV(Bird Eye View鸟瞰图)网络的基础上,全新升级GOD(General Obstacle Detection通用障碍物检测)网络。更强大的识别和处理能力,让异形障碍物识别率达到99.9%,不仅能够精准识别人、车等白名单障碍物,还能识别成排锥桶、静止水马、土堆杂物、大石碎石等异形障碍物。
同时也升级了PDP(预测决策规控)网络:乾崑ADS3.0的全新架构采用PDP网络,实现了预决策和规划一张网。这使得决策和规划更加类人化,行驶轨迹更接近人类驾驶,通行效率更高。复杂路口通过率超过96%。
另外乾崑ADS3.0主动安全进一步提升:在这里多说一嘴,就最基本的AEB功能,华为目前全新升级的全向防碰撞系统CAS3.0,支持前向 + 侧向 + 后向主动安全,支持对静止车最高 120km/h 刹停速度,持续增强前向主动安全能力,并实现了ESA(紧急转向辅助)再增强。在AEB(自动紧急制动)刹车距离不足的场景下,系统自动紧急转向避障,无需人先打方向盘触发。侧向主动安全也支持更多的场景,例如斜穿、横穿的车辆、自行车和电动车,以及更灵活的避让空间。
前向主动安全:
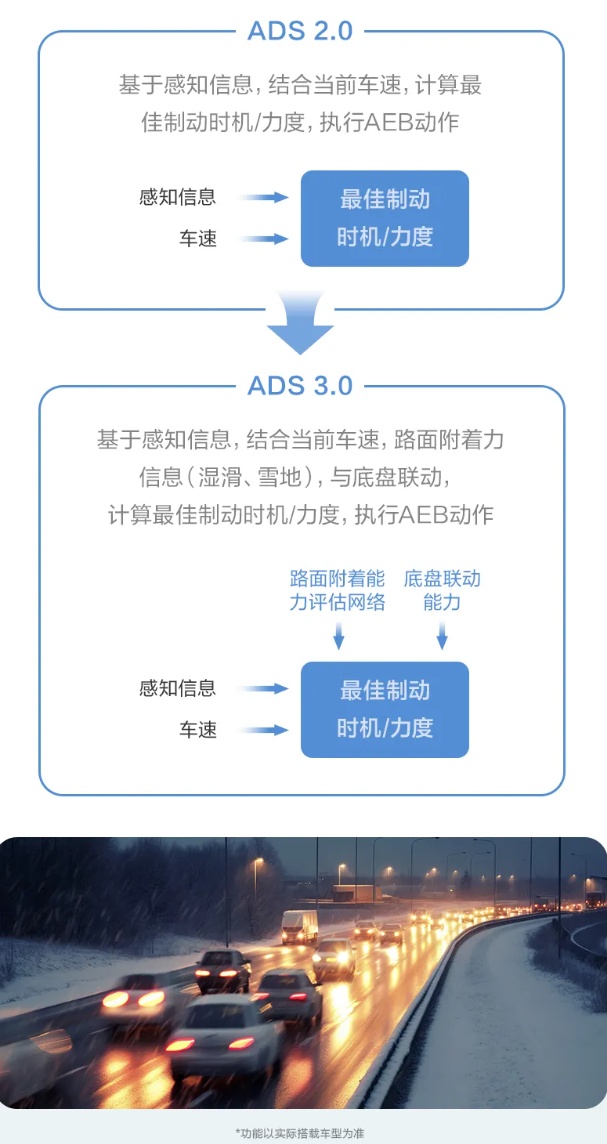
路面自适应 AEB,结合路面信息,感知和底盘能力深度融合参与 AEB 决策及执行。
基于感知信息,结合当前车速,路面附着力信息 (湿滑、雪地),与底盘联动,计算最佳制动时机 / 力度,执行 AEB 动作。
侧向主动安全:
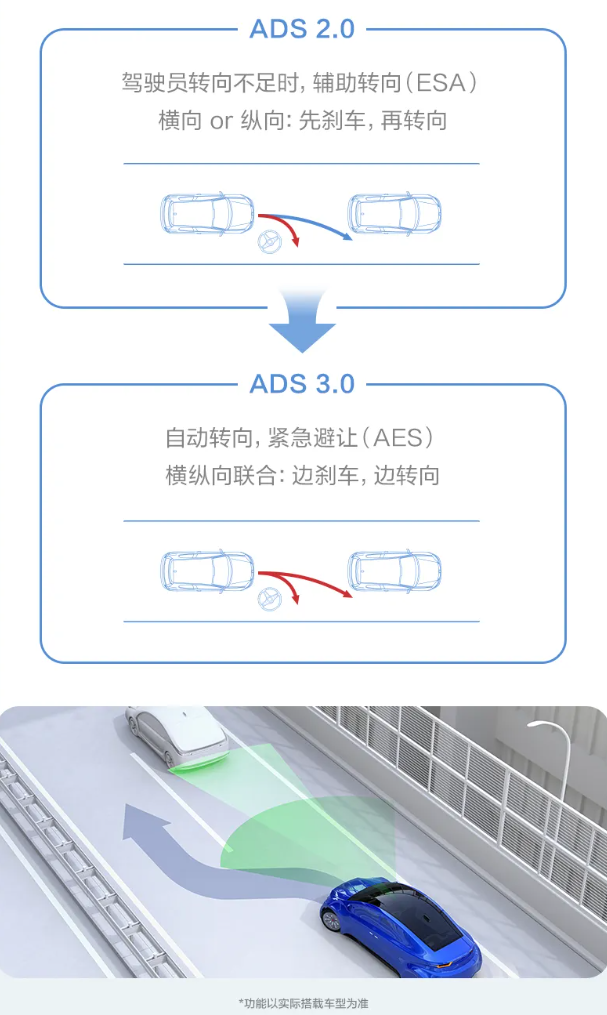
再进阶 ESA 紧急转向辅助,AEB 刹车距离不足的场景下,驾驶员横向避撞转向不足时,ESA 辅助横向避障。
ADS 2.0:驾驶员转向不足时,辅助转向(ESA)。横向 / 纵向:先刹车,再转向
ADS 3.0:自动转向,紧急避让(AES)。横纵向联合:边刹车,边转向
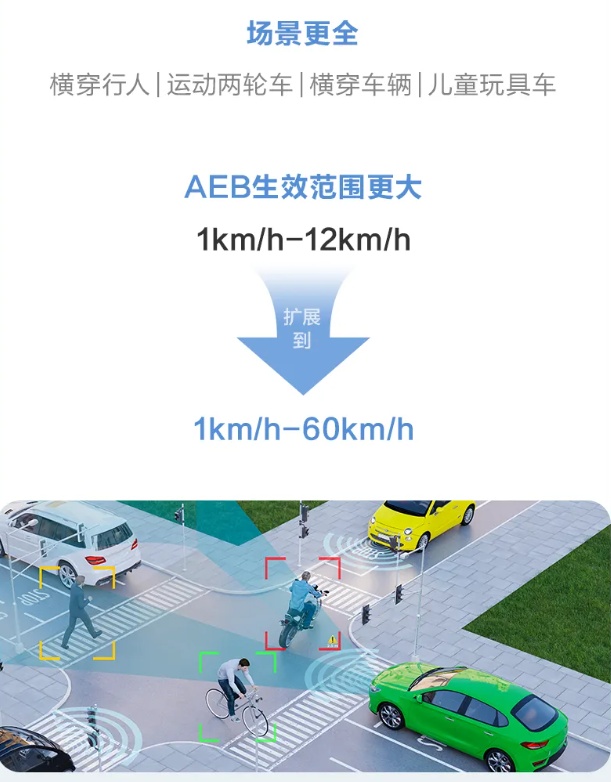
后向主动安全:
场景:横穿行人、运动两轮车、横穿车辆、儿童玩具车
AEB 生效范围: 1km/h-12km/h 扩展到 1km/h-60km/h
华为智能驾驶计算平台MDC,详情请参见以下内容:
https://zhuanlan.zhihu.com/p/662970287






![[[nodiscard]] 使用说明](https://i-blog.csdnimg.cn/direct/542cd6c40ac24ee3849f3248d322f77a.png)