The Qualcomm Intelligent Robotics Product SDK (QIRP SDK) 高通智能机器SDK基于ROS2进行开发,此SDK适用于高通linux发行版本,QIRPSDK中提供以下内容:
ROS 包中用于支持机器人应用程序开发的参考代码
- 用于评估机器人平台的端到端场景示例
- 集成交叉编译工具链,包括常见的编译工具,例如 aarch64-oe-linux-gcc、make、cmake 和 ROS 核心
- 集成开发的工具和脚本
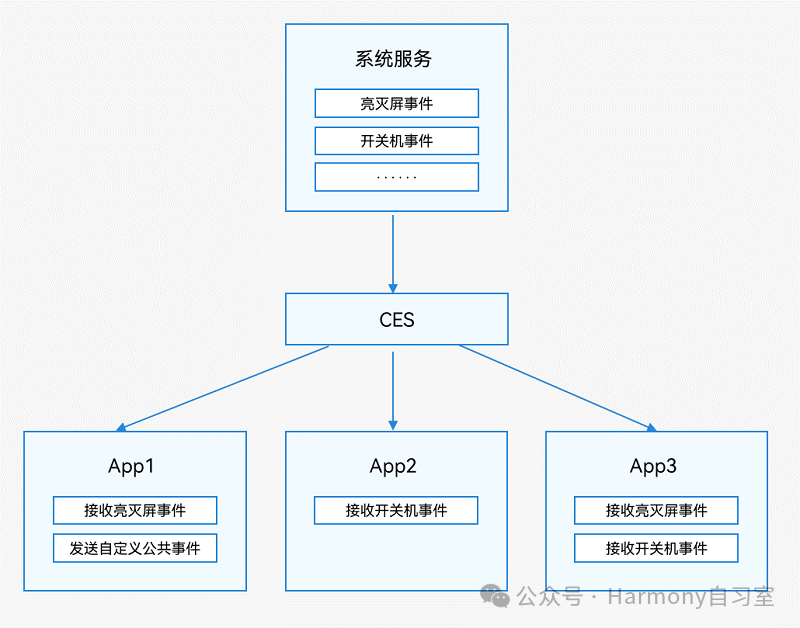
QIRP SDK整体架构如下图所示:

Qualcomm® Intelligent Multimedia SDK (IM SDK) :提供用于优化应用开发的 Qualcomm 硬件加速插件。
Qualcomm® Intelligent Robotics Function SDK: 为 Qualcomm 机器人平台提供机器人功能 ROS 节点。该 SDK 基于 ROS2,这是一个开源的操作系统。
Qualcomm® AI Engine Direct SDK: 为 Qualcomm 芯片组和 AI 加速核心上的 AI/ML 用例提供软件架构。它提供了一个统一的 API,具有模块化和可扩展的单独加速器库,形成了全栈 AI 解决方案的可重用基础。它支持 runtime,如 Qualcomm Neural Processing SDK 和 TensorFlow Lite AI Engine Direct Delegate。
编译和安装QIRPSDK
前提条件:需要Ubunt22.04的主机和至少50GB的磁盘空间
Ubuntu 主机需要进行一些配置操作,确保所需的软件工具已安装和配置,可以使用。
1.安装以下软件包,准备好运行 Yocto 版本所需的主机环境
sudo apt update
sudo apt install gawk wget git diffstat unzip texinfo gcc build-essential \
chrpath socat cpio python3 python3-pip python3-pexpect xz-utils \
debianutils iputils-ping python3-git python3-jinja2 libegl1-mesa \
libsdl1.2-dev pylint xterm python3-subunit mesa-common-dev zstd \
liblz4-tool locales tar python-is-python3 file libxml-opml-simplegen-perl \
vim whiptail
2.设置语言环境:
sudo locale-gen en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LC_ALL=en_US.UTF-8
export LANG=en_US.UTF-8
3更新 git 配置:
# Check if your identity is configured in. gitconfig
git config --get user.email
git config --get user.name
# Run the following commands if you do not have your account identity set in .gitconfig
git config --global user.email <Your email ID>
git config --global user.name <"Your Name">
# Add the following UI color option for output of console (optional)
git config --global color.ui auto
# Add the following git configurations to fetch large size repositories and to avoid unreliable connections
git config --global http.postBuffer 1048576000
git config --global http.maxRequestBuffer 1048576000
git config --global http.lowSpeedLimit 0
git config --global http.lowSpeedTime 999999
编译基础镜像
1.设置repo
mkdir -p ~/bin
cd ~/bin
#Note if you already have a previous directory of repo_tool, you can delete it
rm -rf ~/bin/repo_tool
git clone https://android.googlesource.com/tools/repo.git -b v2.41 repo_tool
cd repo_tool
git checkout -b v2.41
export PATH=~/bin/repo_tool:$PATH
如果您所在的区域阻止了对 android.googlesource 的访问,请尝试以下配置以从 Codelinaro 镜像获取存储库
git config --global url.https://git.codelinaro.org/clo/la/tools/repo.insteadOf https://android.googlesource.com/tools/repo
如果上述方法不起作用,也可以尝试用命令行安装repo
sudo apt install curl
mkdir -p ~/bin
curl https://raw.githubusercontent.com/GerritCodeReview/git-repo/v2.41/repo -o ~/bin/repo && chmod +x ~/bin/repo
export PATH=~/bin:$PATH
注意:最新的repo只支持python3
2.下载 Qualcomm Yocto 和支持层:
mkdir <workspace>
cd <workspace>
repo init -u https://github.com/quic-yocto/qcom-manifest -b qcom-linux-kirkstone -m <robotics-release-manifest>
repo sync -c -j8
有关最新版的<robotics-release-manifest>请参考Qualcomm Documentation
举例:
这里采用‘qcom-6.6.28-QLI.1.1-Ver.1.1_robotics-product-sdk-1.1’版本
repo init -u https://github.com/quic-yocto/qcom-manifest -b qcom-linux-kirkstone -m qcom-6.6.28-QLI.1.1-Ver.1.1_robotics-product-sdk-1.1.xml
repo sync -c -j8
下载完后检查layer文件夹下这些层是否存在
meta-qcom
meta-qcom-hwe
meta-qcom-distro
meta-ros
meta-qcom-robotics
meta-qcom-robotics-distro
meta-qcom-robotics-sdk
meta-qcom-qim-product-sdk
meta-qcom-qim-product-sdk
3.设置编译环境:
cd <workspace>
MACHINE=qcm6490 DISTRO=qcom-robotics-ros2-humble source setup-robotics-environment
4编译机器人镜像和 QIRP SDK 组件
../qirp-build qcom-robotics-full-image
编译过程中可能会出现网络错误导致fetch error,多尝试几次即可。
编译完成后可查看以下文件是否存在
QIRP SDK artifacts: <workspace>/build-qcom-robotics-ros2-humble/tmpglibc/deploy/qirpsdk_artifacts/qirp-sdk_<version>.tar.gz
Robotics image:<workspace>/build-qcom-robotics-ros2-humble/tmpglibc/deploy/images/qcm6490/qcom-robotics-full-image
刷写镜像(需要RB3Gen2设备)
确保在 Linux 主机上配置了 Qualcomm 制造供应商 ID 05c6 的 udev USB 规则
1.导航到 udev USB 规则目录
cd /etc/udev/rules.d
ls
如果 51-qcom-usb.rules 文件不存在,使用 sudo vi 51-qcom-usb.rules 创建该文件并将以下内容添加到文件中:
SUBSYSTEMS=="usb", ATTRS{idVendor}=="05c6", ATTRS{idProduct}=="9008", MODE="0666", GROUP="plugdev"
重新启动udev
sudo systemctl restart udev
2.将设备进入EDL模式
adb shell reboot edl
3.验证设备是否已进入 QDL 模式
lsusb
输出以下内容表示成功进入QDL
Bus 002 Device 014: ID 05c6:9008 Qualcomm, Inc. Gobi Wireless Modem (QDL mode)
4.确保ModemManager 未在运行
有些 Linux 发行版本随附 ModemManager,即一款用于配置移动宽带的工具。当设备以 USB 模式连接时,它会被识别为 Qualcomm Modem,ModemManager 会尝试配置该设备。由于这会干扰 QDL 刷写,因此您必须在连接设备之前禁用 ModemManager。如果使用的 Linux 发行版本带有 systemd,则可使用以下命令停止 ModemManager:
sudo systemctl stop ModemManager
如果您需要 ModemManager,则可在刷写完成后再次启动它。
5. 导航到工作区中的以下位置可找到 QDL 工具并刷写镜像
# cd <workspace_path>/build-qcom-wayland/tmp-glibc/deploy/images/<MACHINE>/<IMAGE>
# build_path: For DISTRO=qcom-wayland, it is build-qcom-wayland.
# For DISTRO=qcom-robotics-ros2-humble, it is build-qcom-robotics-ros2-humble
# qdl <prog.mbn> [<program> <patch> ...]
# Example: build_path is build-qcom-wayland
cd <workspace_path>/build-qcom-wayland/tmp-glibc/deploy/images/qcm6490/qcom-multimedia-image
./qdl prog_firehose_ddr.elf rawprogram*.xml patch*.xml
如果您在终端窗口上看到 partition 1 is now bootable(如以下消息所示),则表示刷写成功
LOG: INFO: Calling handler for setbootablestoragedrive
LOG: INFO: Using scheme of value = 1
partition 1 is now bootable
LOG: INFO: Calling handler for power
LOG: INFO: Will issue reset/power off 100 useconds, if this hangs check if watchdog is enabled
LOG: INFO: bsp_target_reset() 1
刷写操作成功后,运行 lsusb 命令以在终端窗口上查看设备信息:
Bus 002 Device 006: ID 05c6:901d Qualcomm, Inc. QCM6490_fd2913cf
作者:王纪尧 高通工程师






![[大模型]Diffusion扩散式生成模型](https://i-blog.csdnimg.cn/direct/7747c6d712f044b58fc7481a0e6898f0.png)