为什么return 非常重要
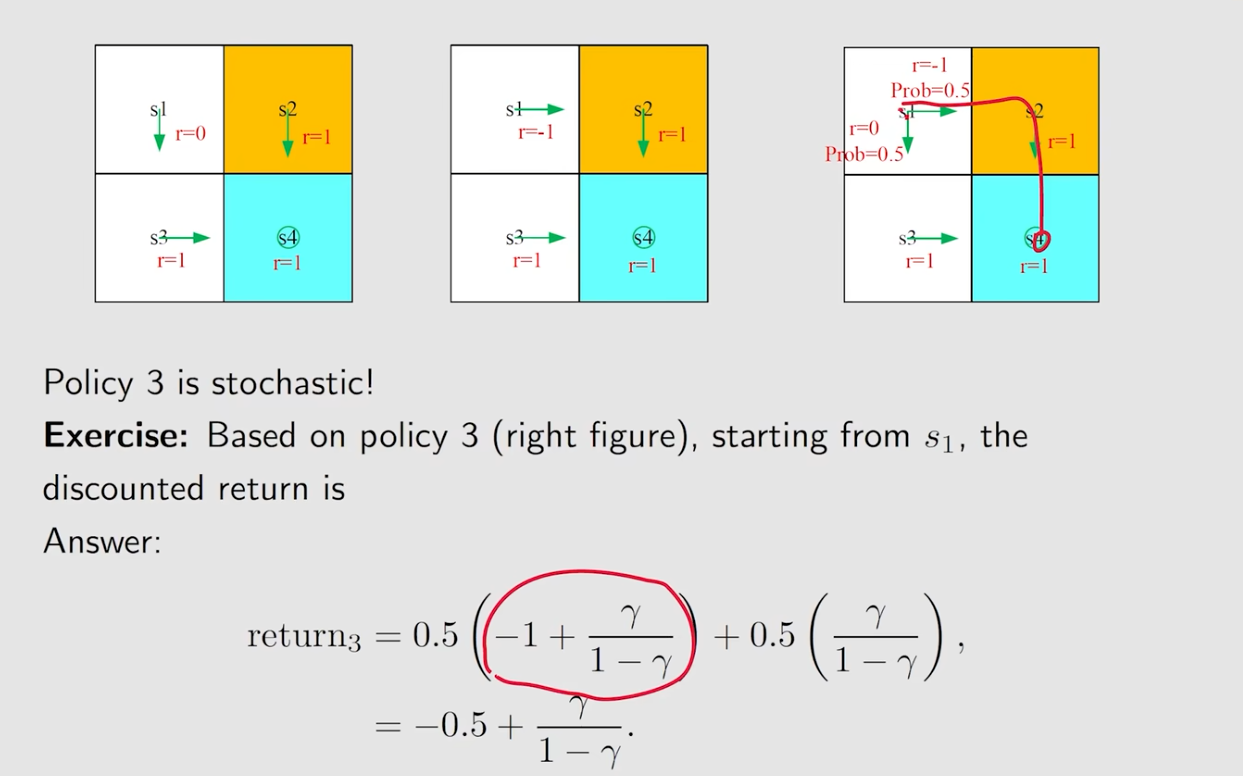
在选择哪个策略更好的时候,此时需要使用到return,比如下面三个策略的返回值。
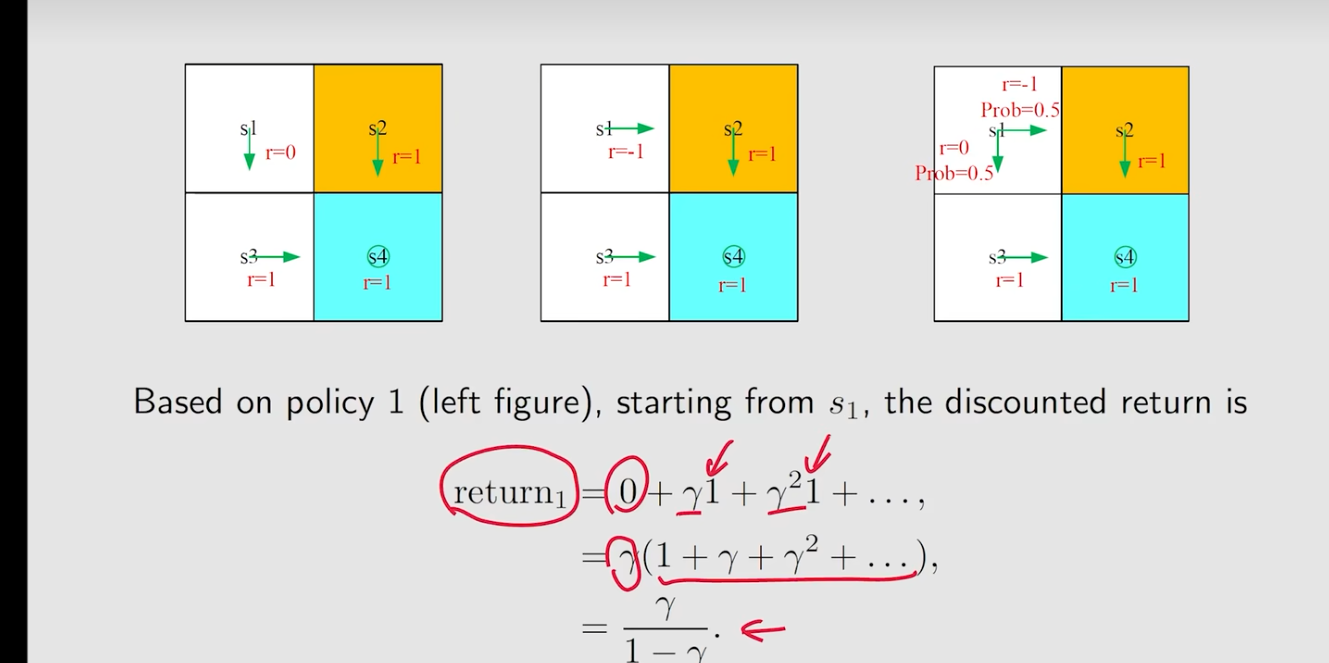
- 策略1:
- 策略2:
- 策略3:涉及到两个policy's path
How to calculate return
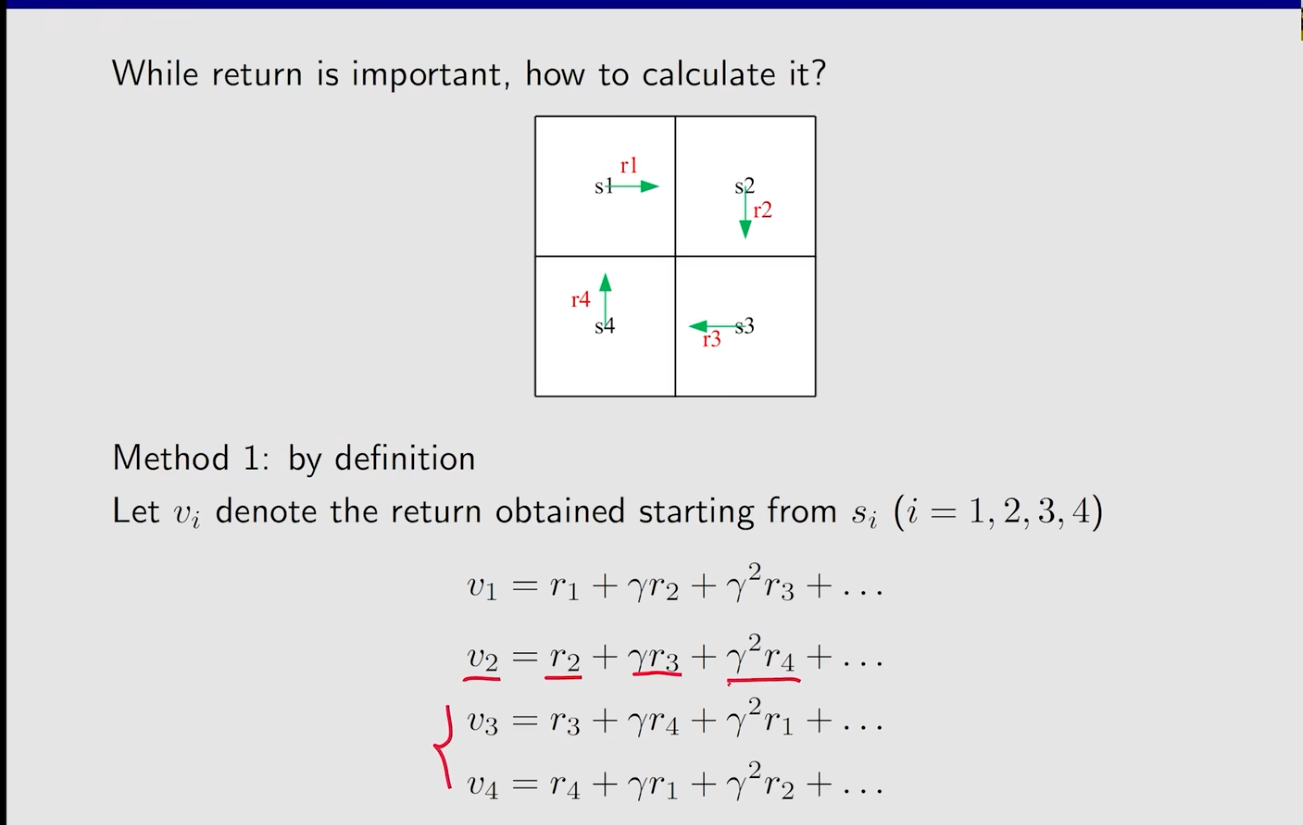
- 定义
上图定义了不同的起点下的return value
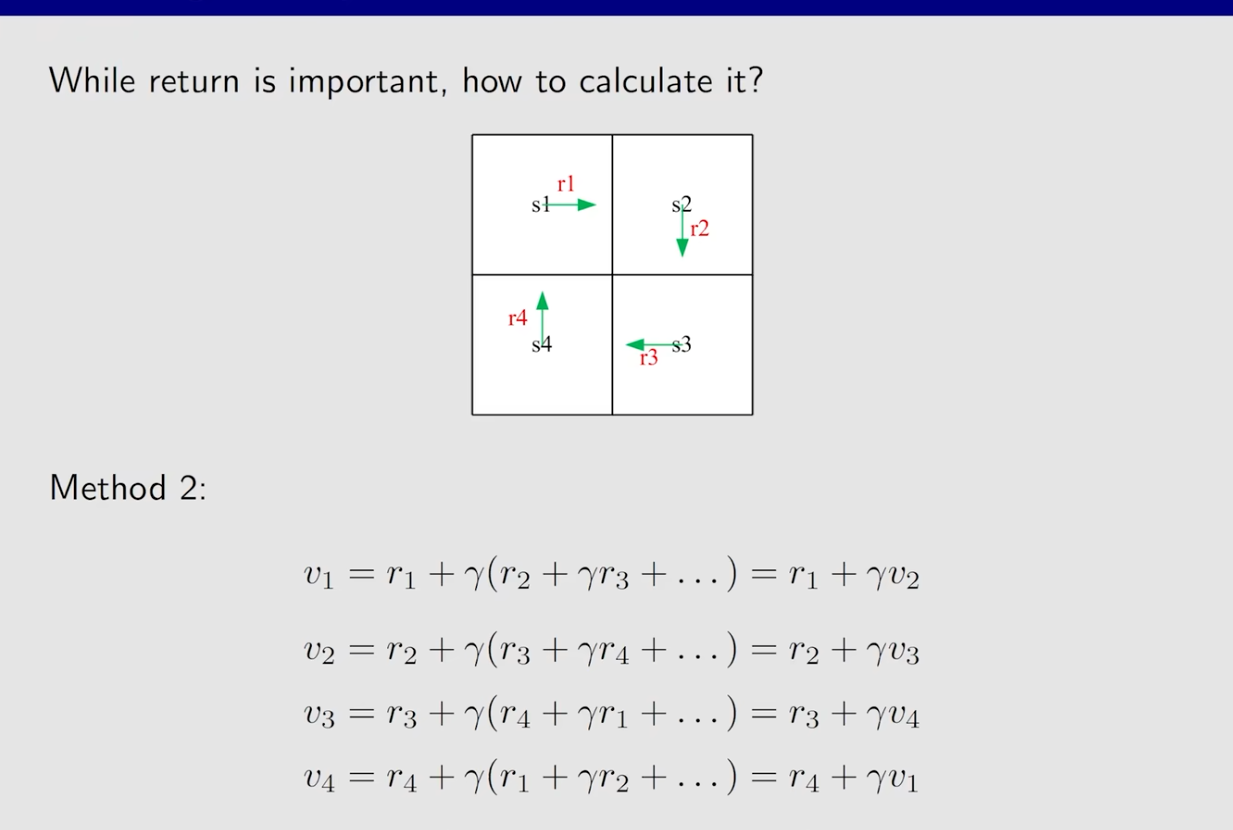
- 递推式
The returns rely on the others' return. - >Bootstrapping.
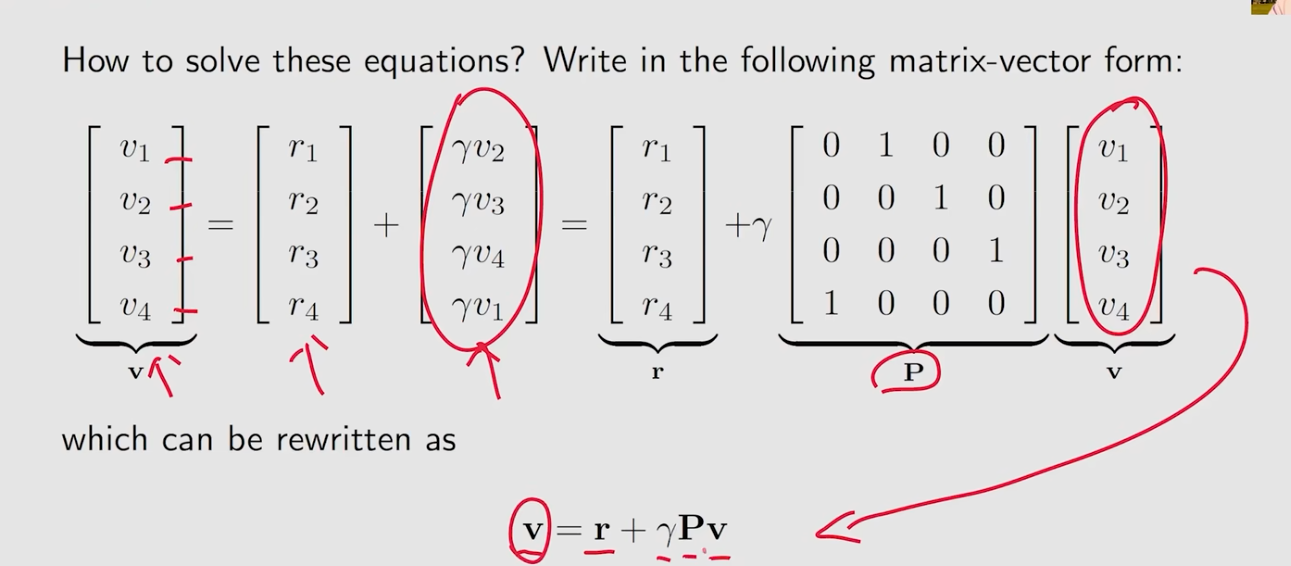
- 矩阵化
可以写成矩阵的形式 -> 贝尔曼公式:
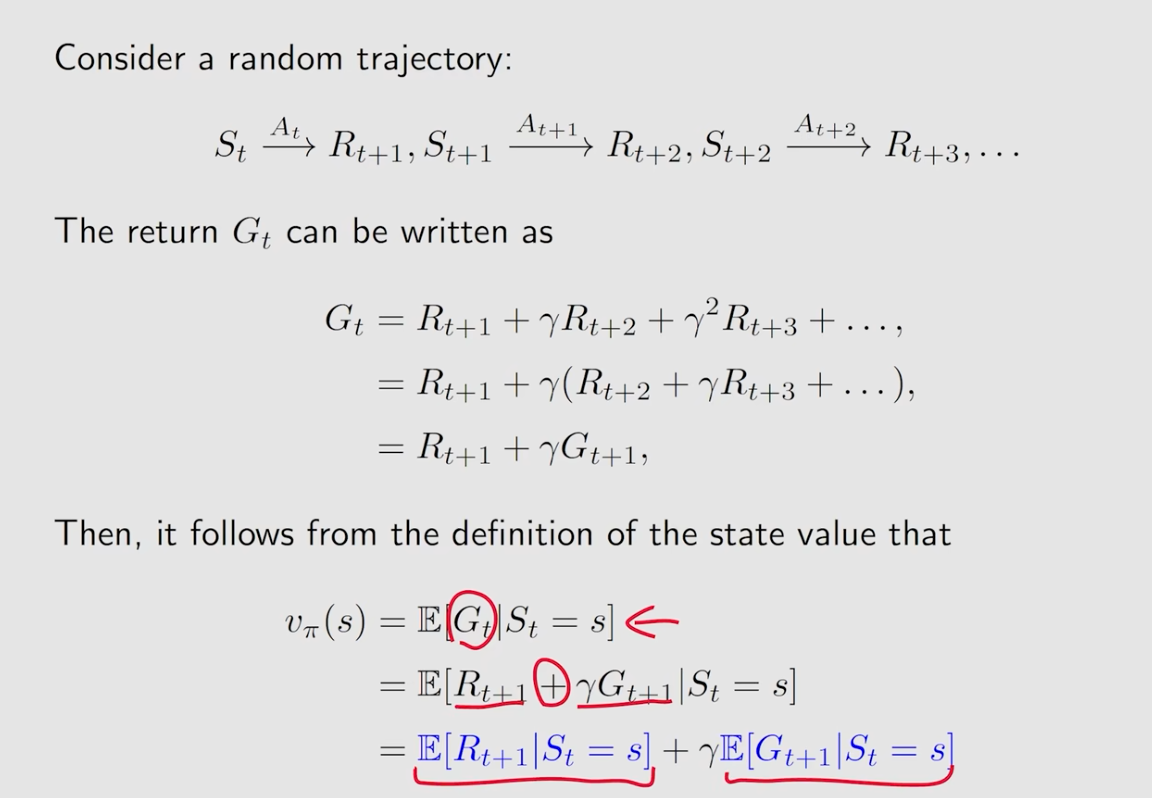
state value
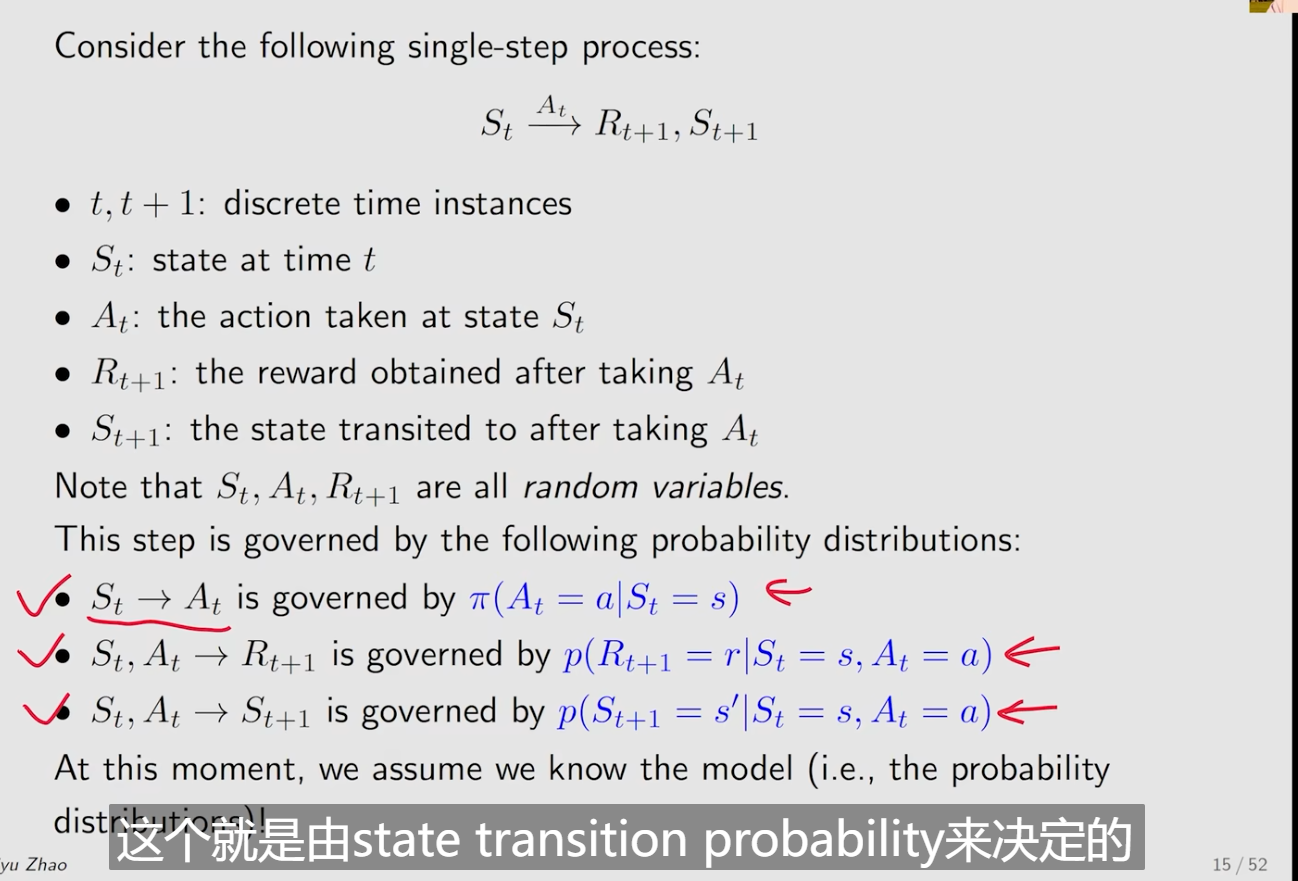
- 单步的过程
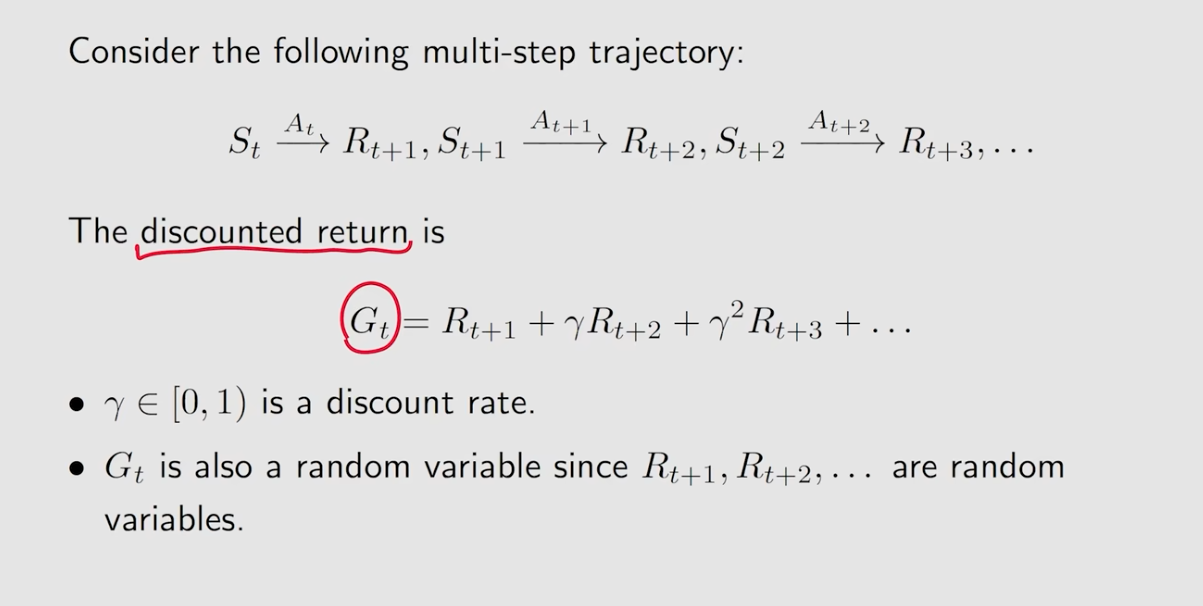
- 多步的过程
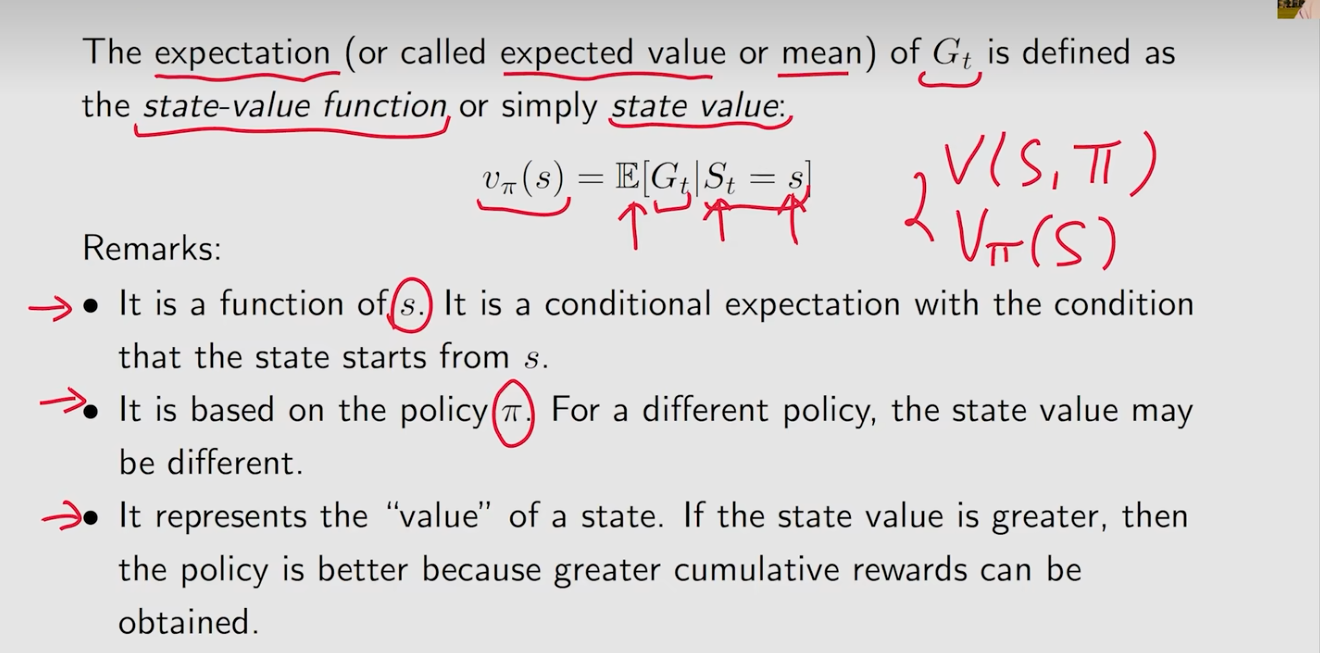
- state value 是关于s(状态)的function,不同的状态会得到不同的state value
- state value是基于policy的,不同的policy得到不同的state value
- 如果state value greater,那么这个策略会更好,因为更多的分数可以得到
贝尔曼公式
-
- calculate
- calculate
-
-
-
其实就是对当前的状态s的情况下求不同的action在策略概率下在下一个时刻得分的平均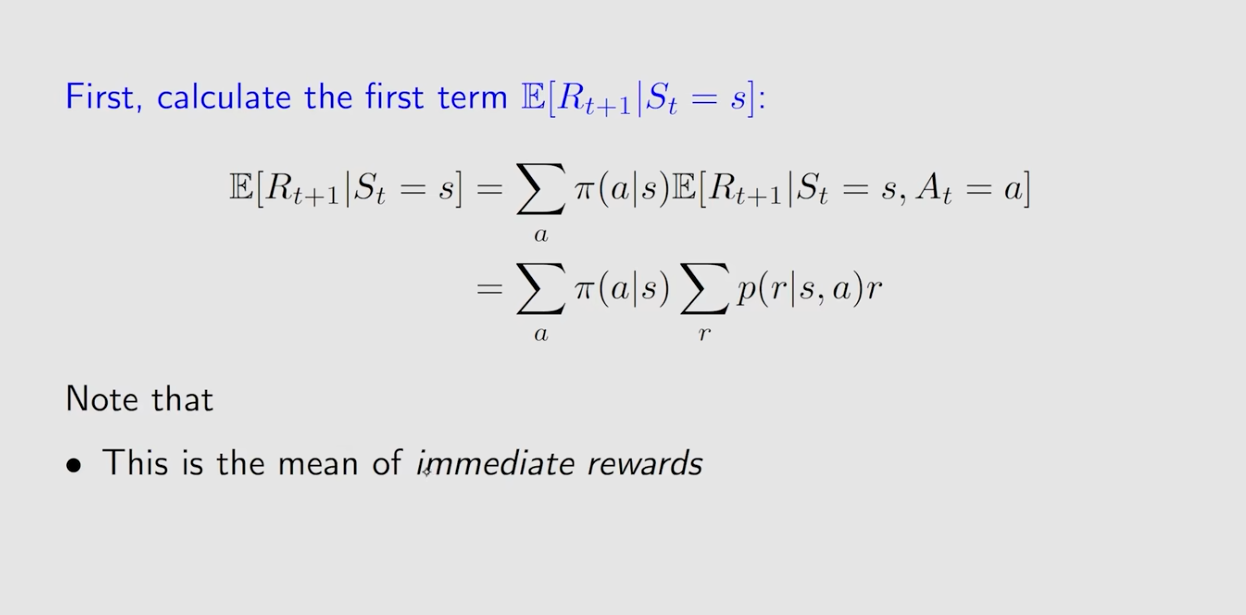
代表我在当前状态s,经过action a得到分数r的概率。
表示当前状态是s,执行action a的概率。
-
-
-
-
-
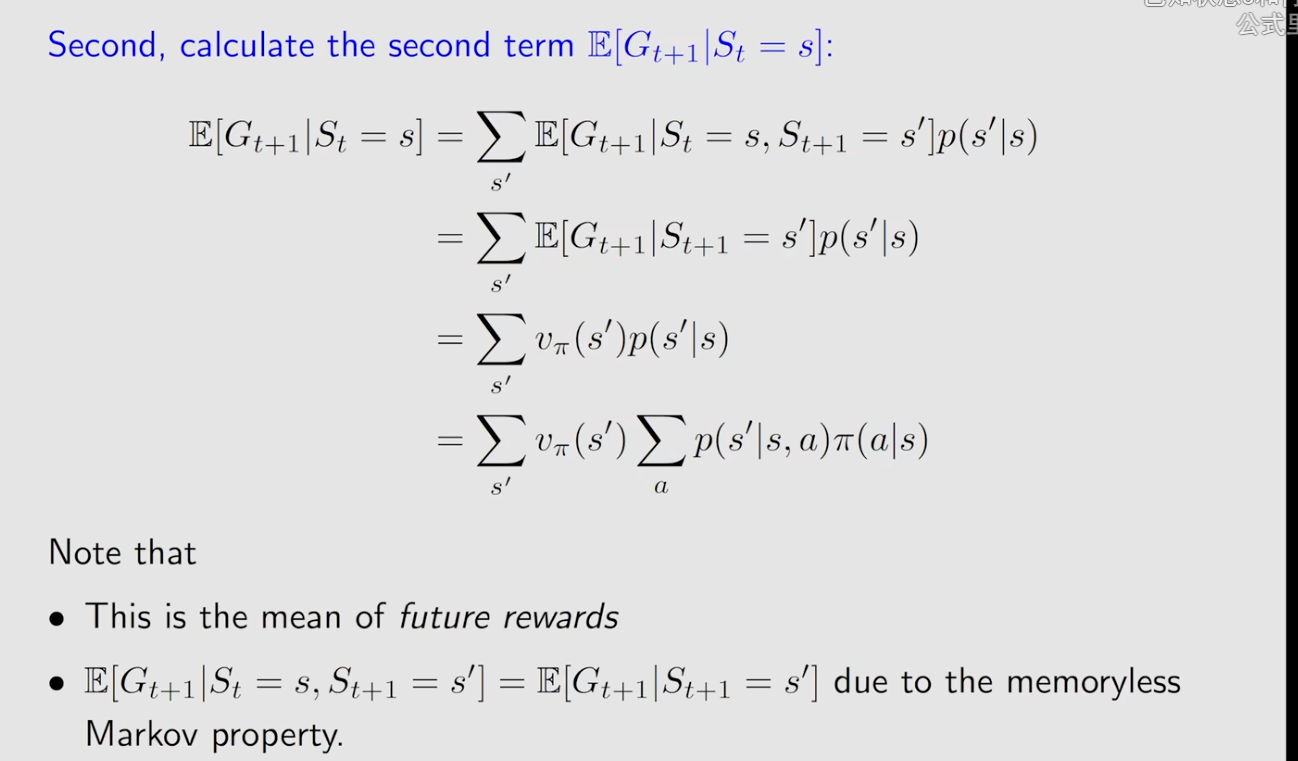
- 这里有几个注意点,首先无记忆性,就是当我已经知道了
那么就不需要知道
表示,当前的状态是s,采取行动a,到达状态s'的期望
- 这里有几个注意点,首先无记忆性,就是当我已经知道了
-
-
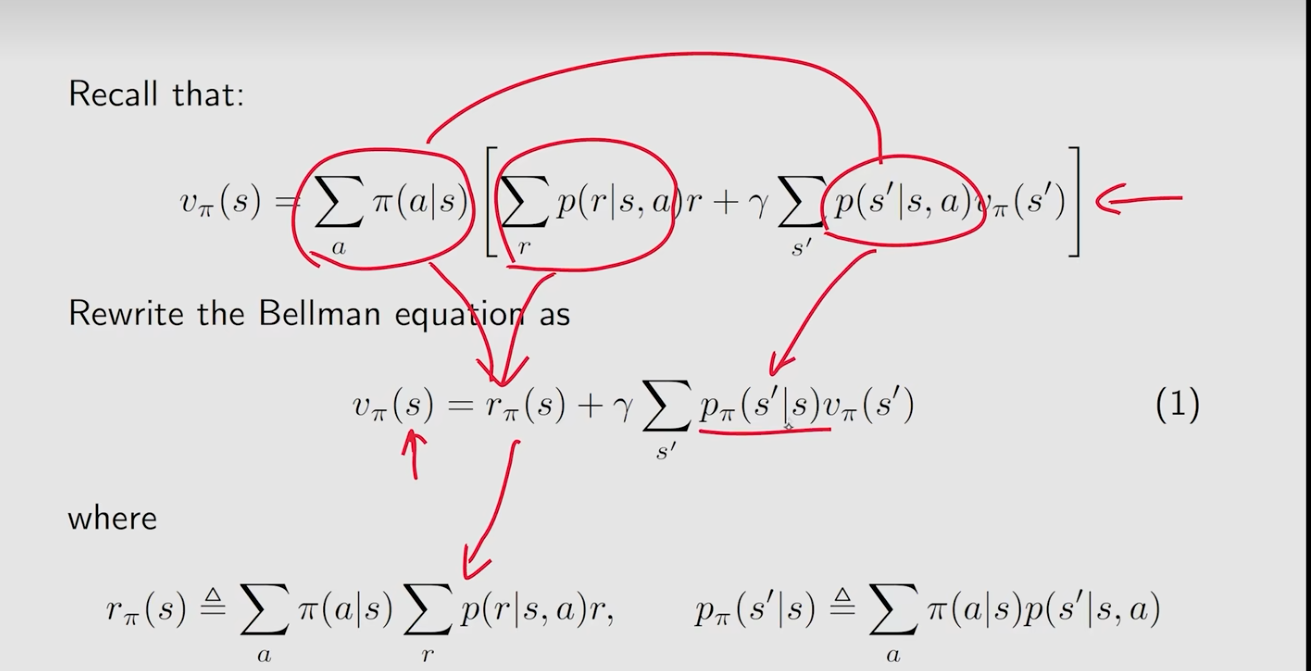
贝尔曼公式
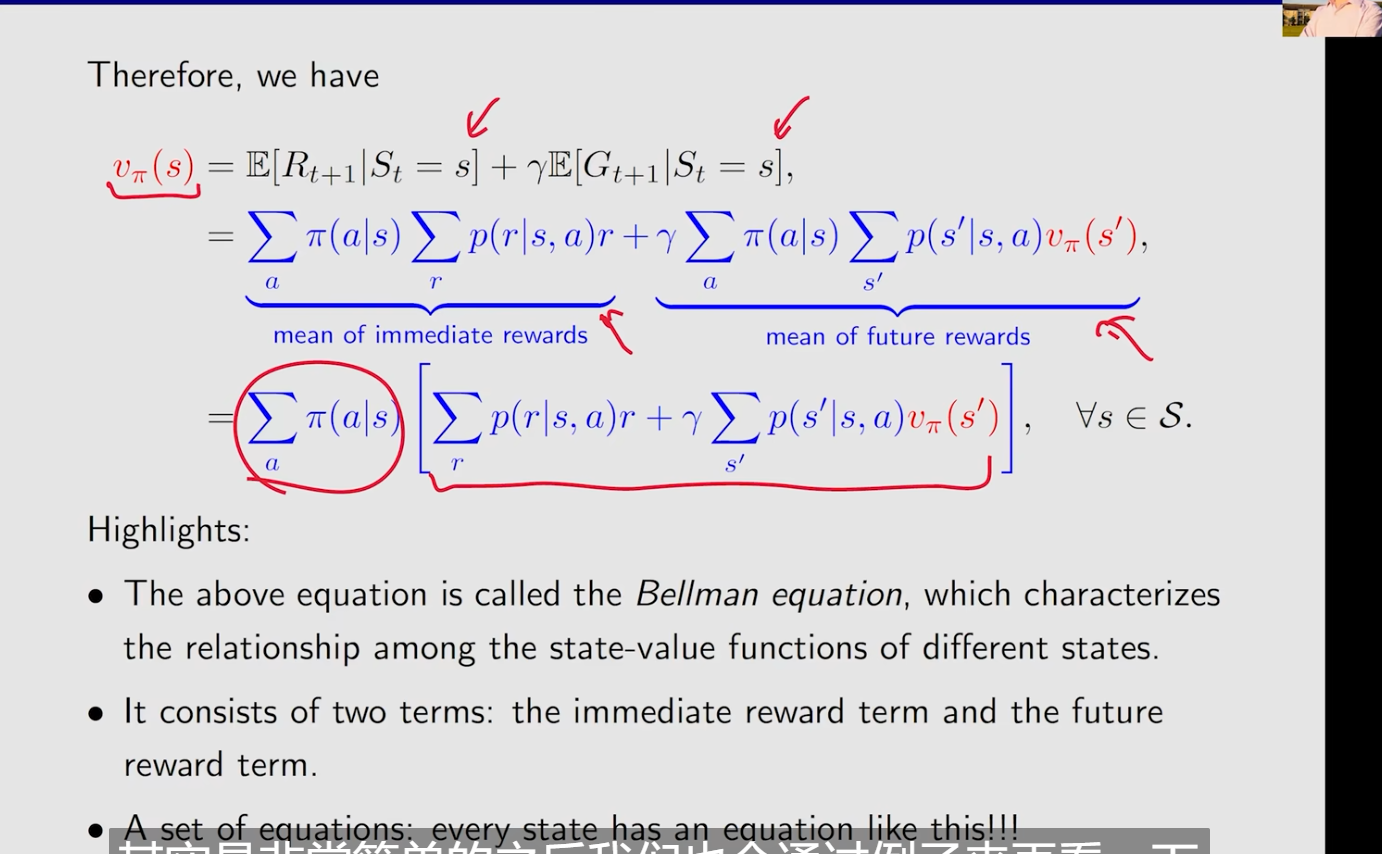
- 描述了state-value 在不同的state的关系
- 两种不同的term 瞬时回报(immediate reward) 和future reward
- 这不是一个式子,是一个状态的集合式子,比如n个状态,n个式子
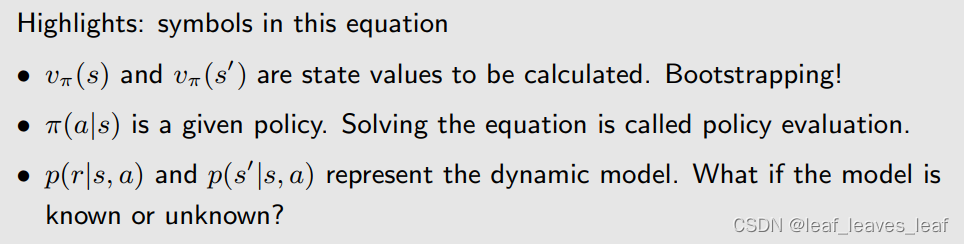
- v_π(s) 和 v_π(s') 是我们要计算的状态值,计算的思想就是 Bootstrapping ! 直观上来讲,等式左边的状态值(state value)v_π(s) 依赖于等式右边的状态值(state value)v_π(s') ,看起来好像没法计算,其实我们有一组这样的式子,把这些式子连立就可以算出来。
- 公式中的 π(a|s) 是给定的策略 policy(是一种概率 probability)。解方程称为策略评估(policy evaluation):贝尔曼公式依赖于策略(policy),如果我们能计算出状态值(state value),其实我们在做的一件事就是评估这个策略(policy evaluation)究竟是好是坏。
- 奖励概率 (Reward probability) p(r|s,a) 和状态转换概率(State transition probability) p(s'|s,a) 代表的是动态模型(dynamic model)或称为环境模型(environment model):分两种情况,一种是我们知道这个模型(model),在本节和下节当中我们都会假设知道这个 model,给出来相应的算法;一种是不知道模型(model),这种情况下我们仍然可以求出 state value,这就是 model free reinforcement learning 的算法。
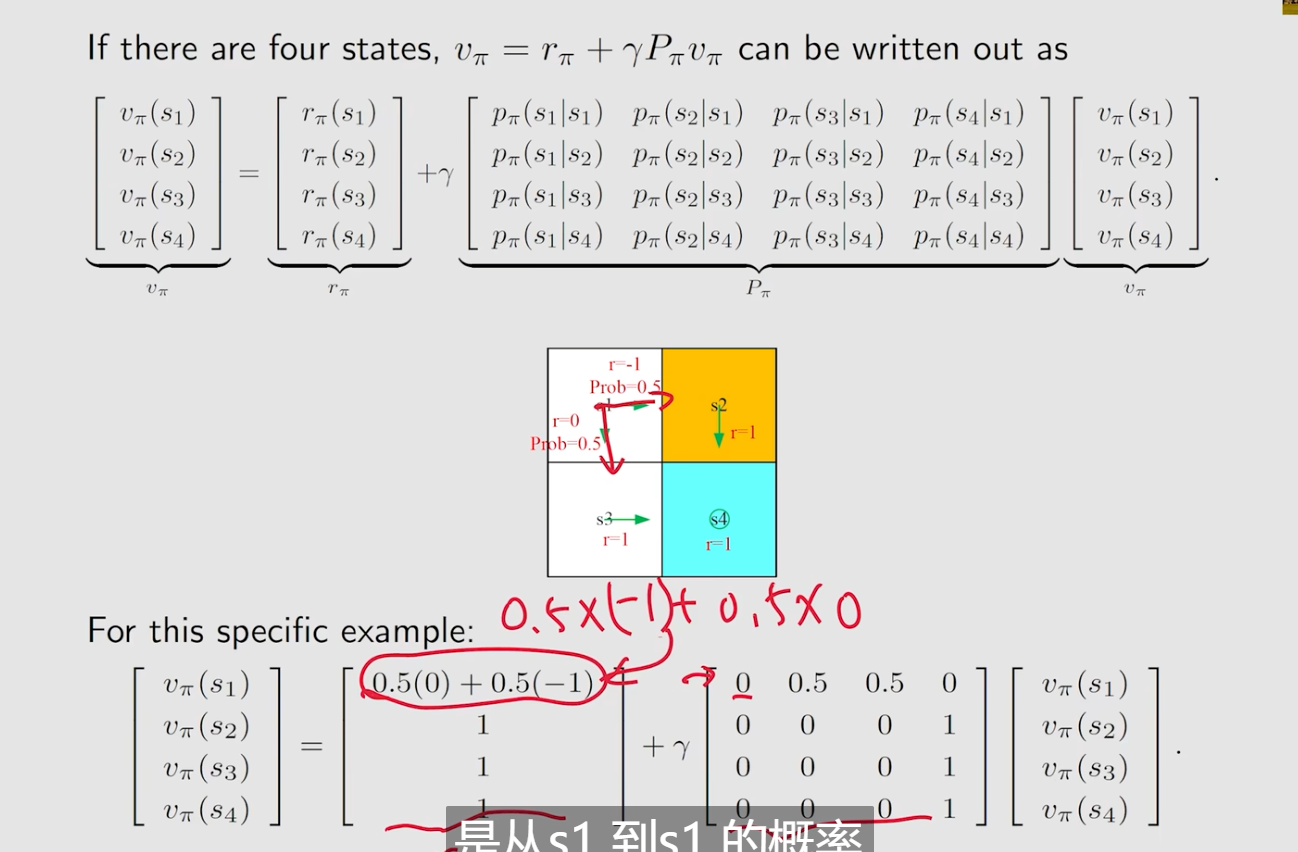
例子
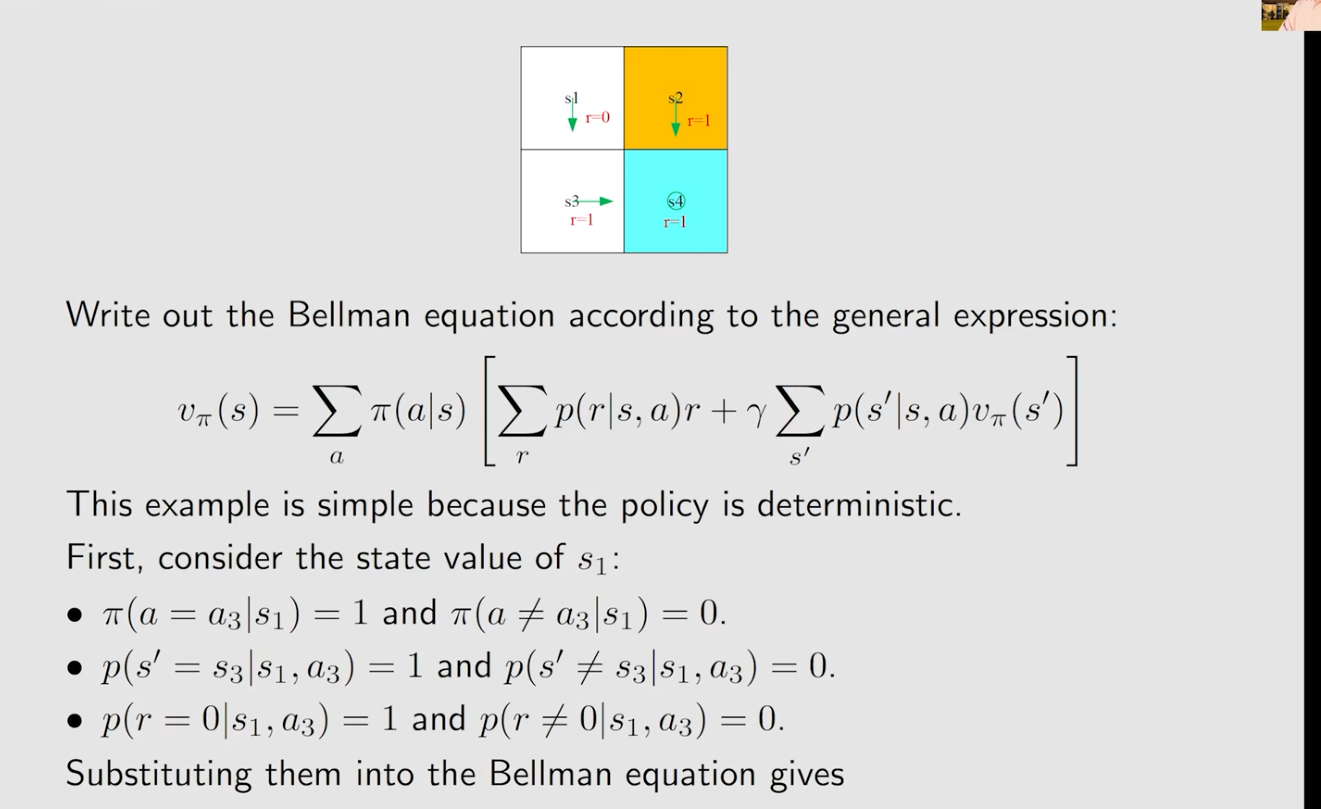
当在S1状态的时候求贝尔曼公式:
- 因为只有一个action的概率,所以
其它为0,可以把求和拿掉
- 乘起来为0,因为其它的r的得分概率为0,那么这一项为0,不需要求和
得出:

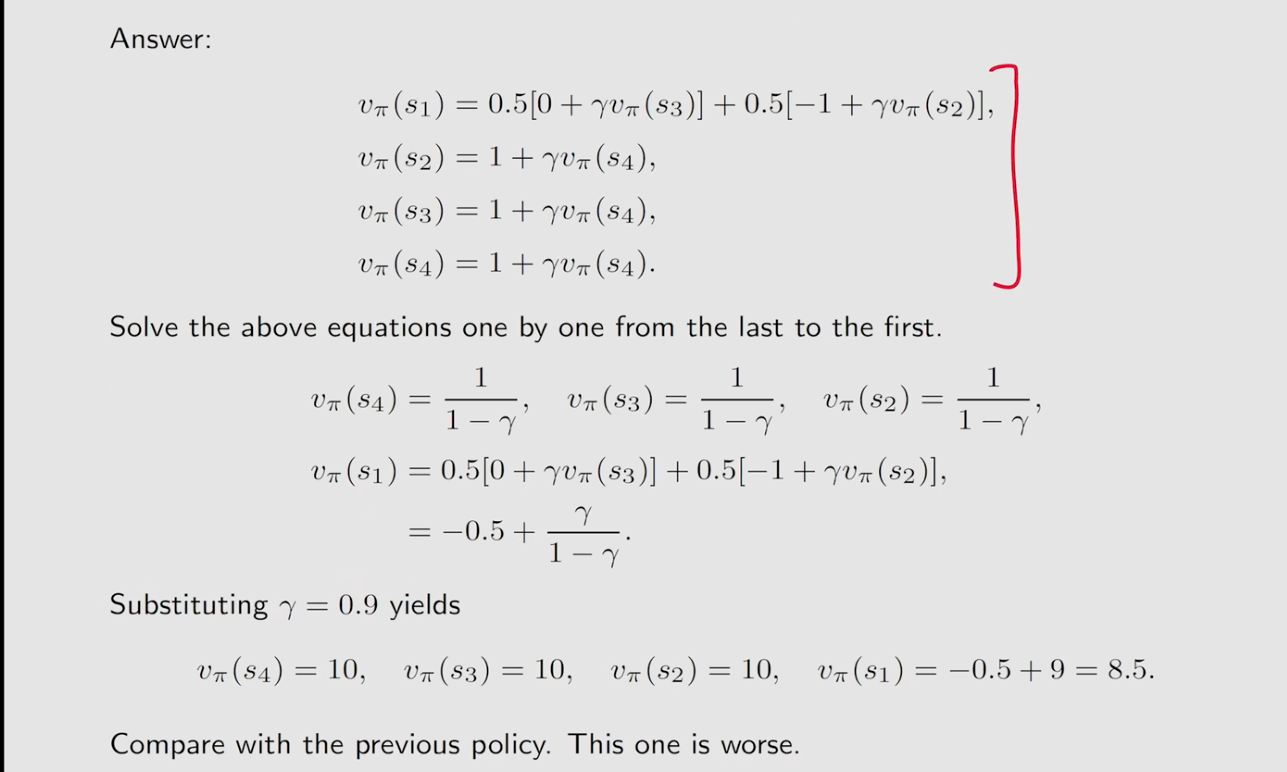
这里得到s1的state value的值为8.5,这个policy是没有上一个policy好的
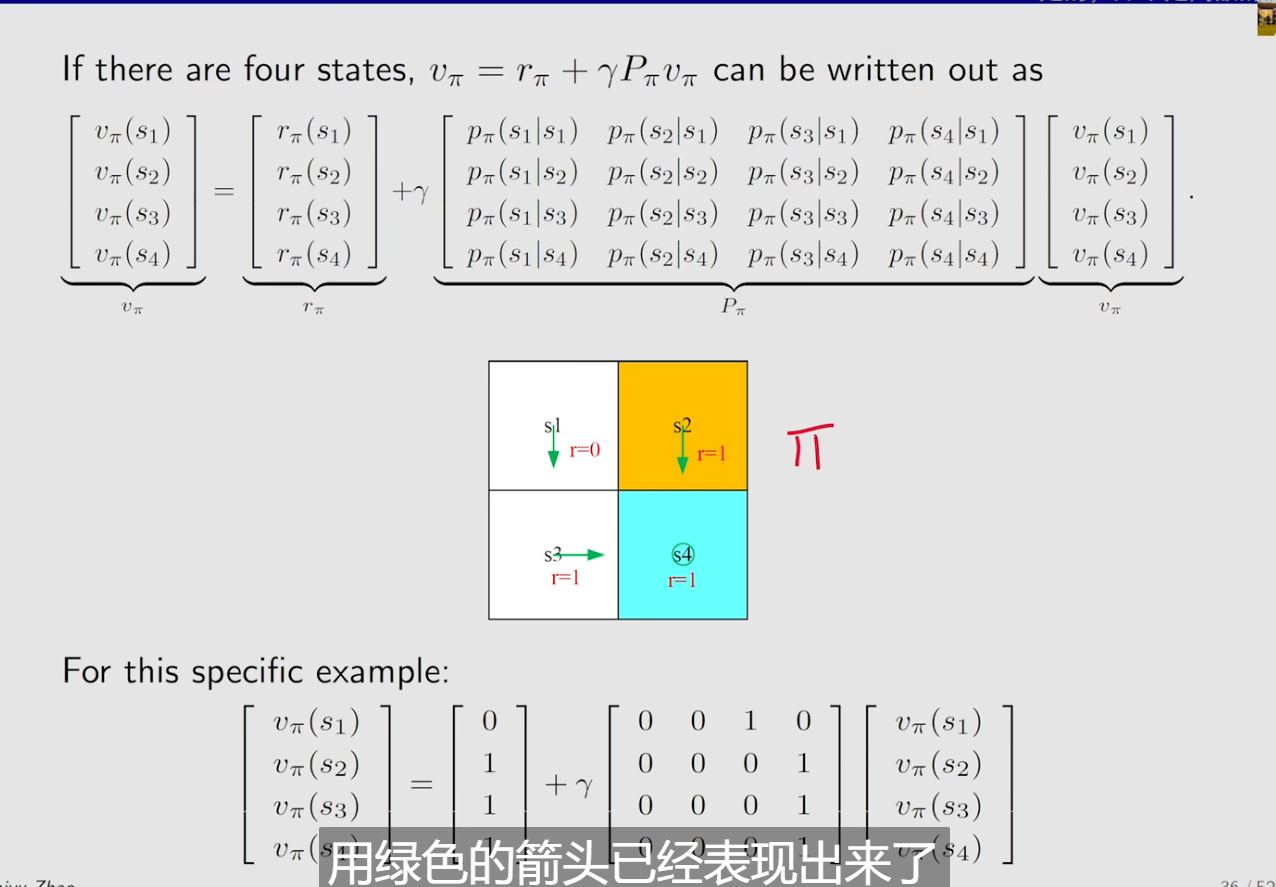
Matrix-vector form
- 将公式简化
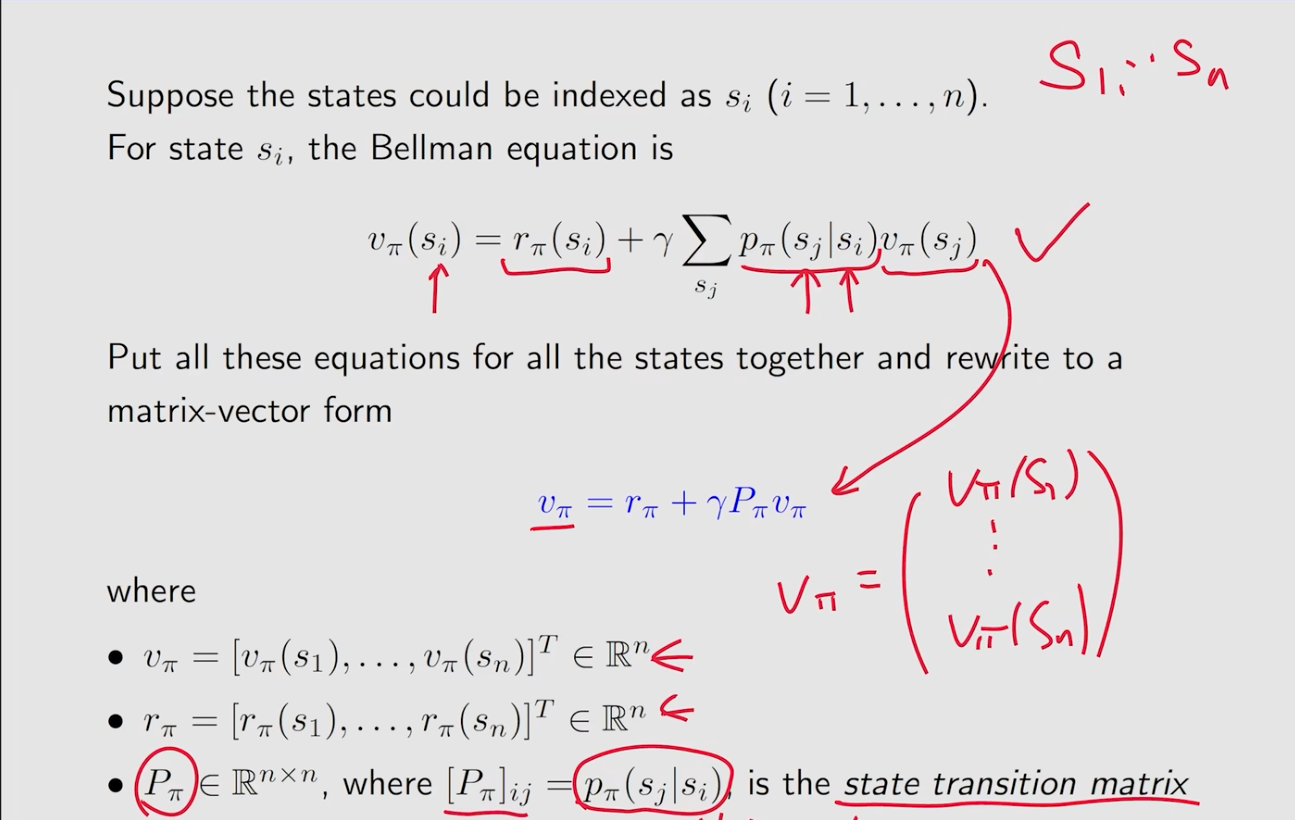
- 向量化
这里的v,r向量化都很明显,这里的P,实际上是利用举证的乘法,对于其中的是一个列向量,那么
就是每一行的值和其列向量相乘得到不同的i对应不同的j的和
得到state value是因为我们需要去评价这个policy

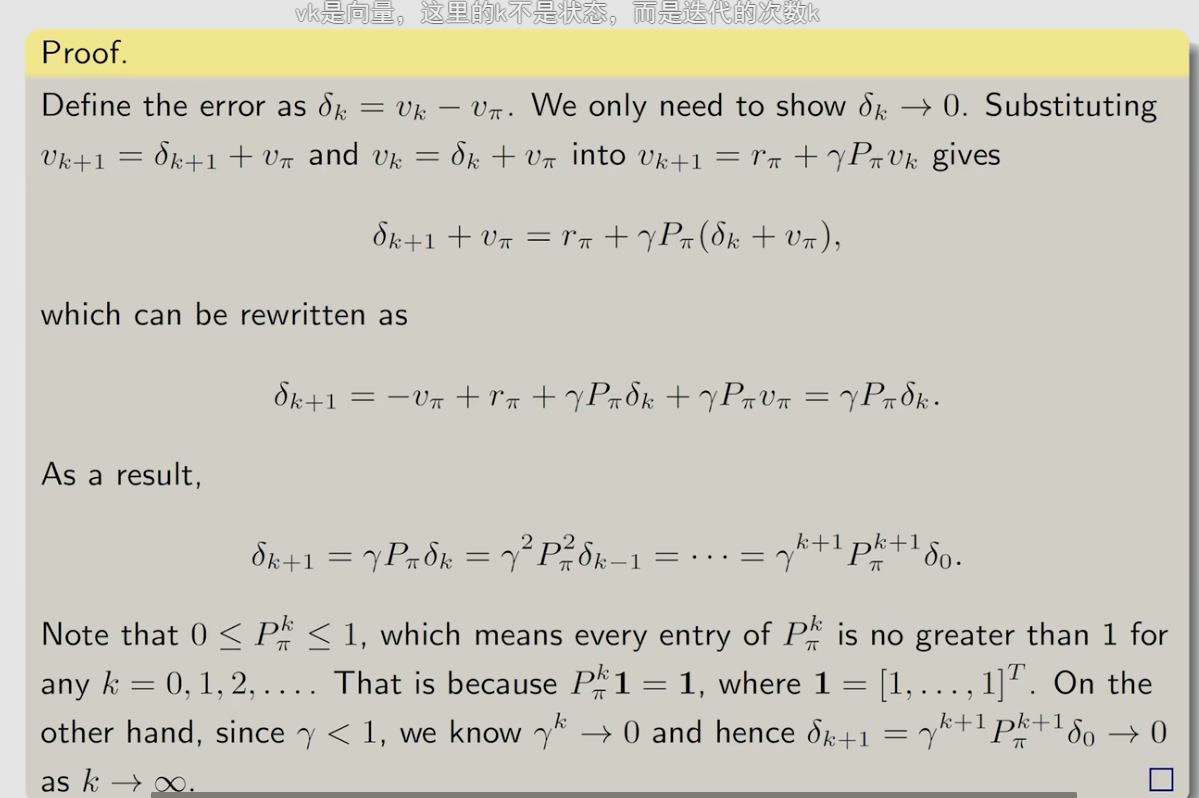
- 近似法
可以证明当趋向无穷的时候,这个
收敛于
。以下是证明:
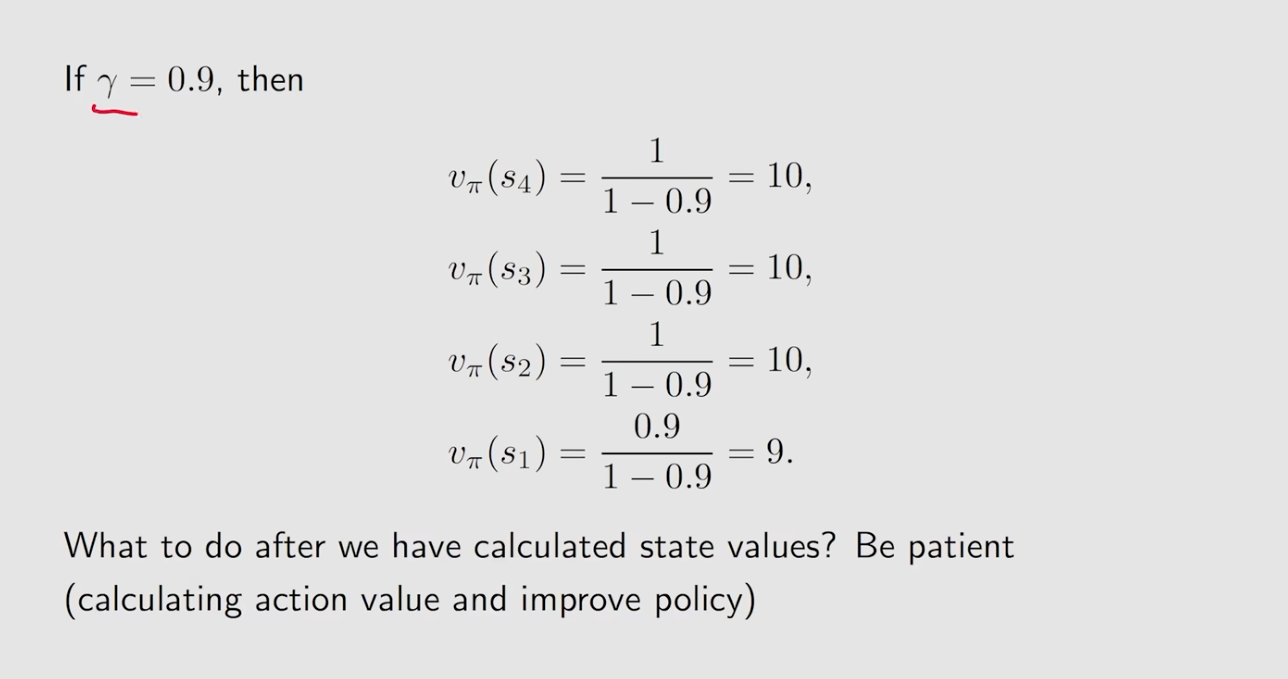
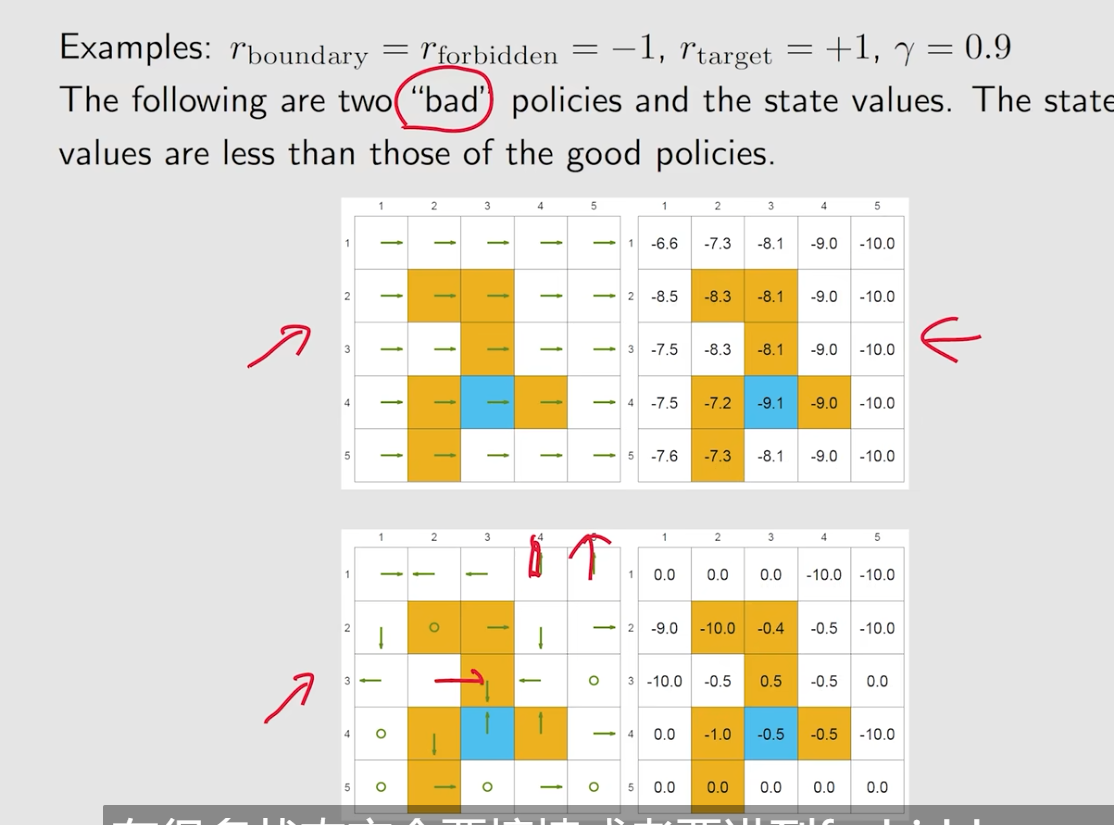
例子
以下考虑比较好的两个策略
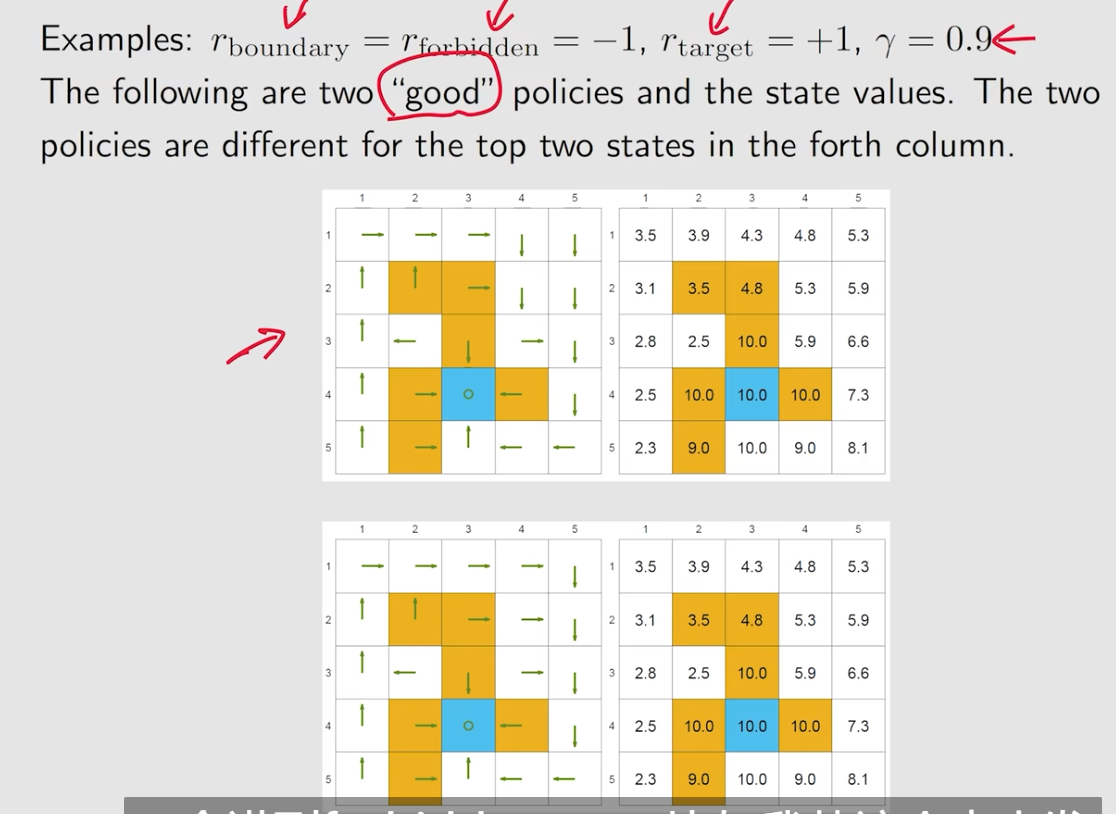
- 靠近target的state value都会比较大,越远越小
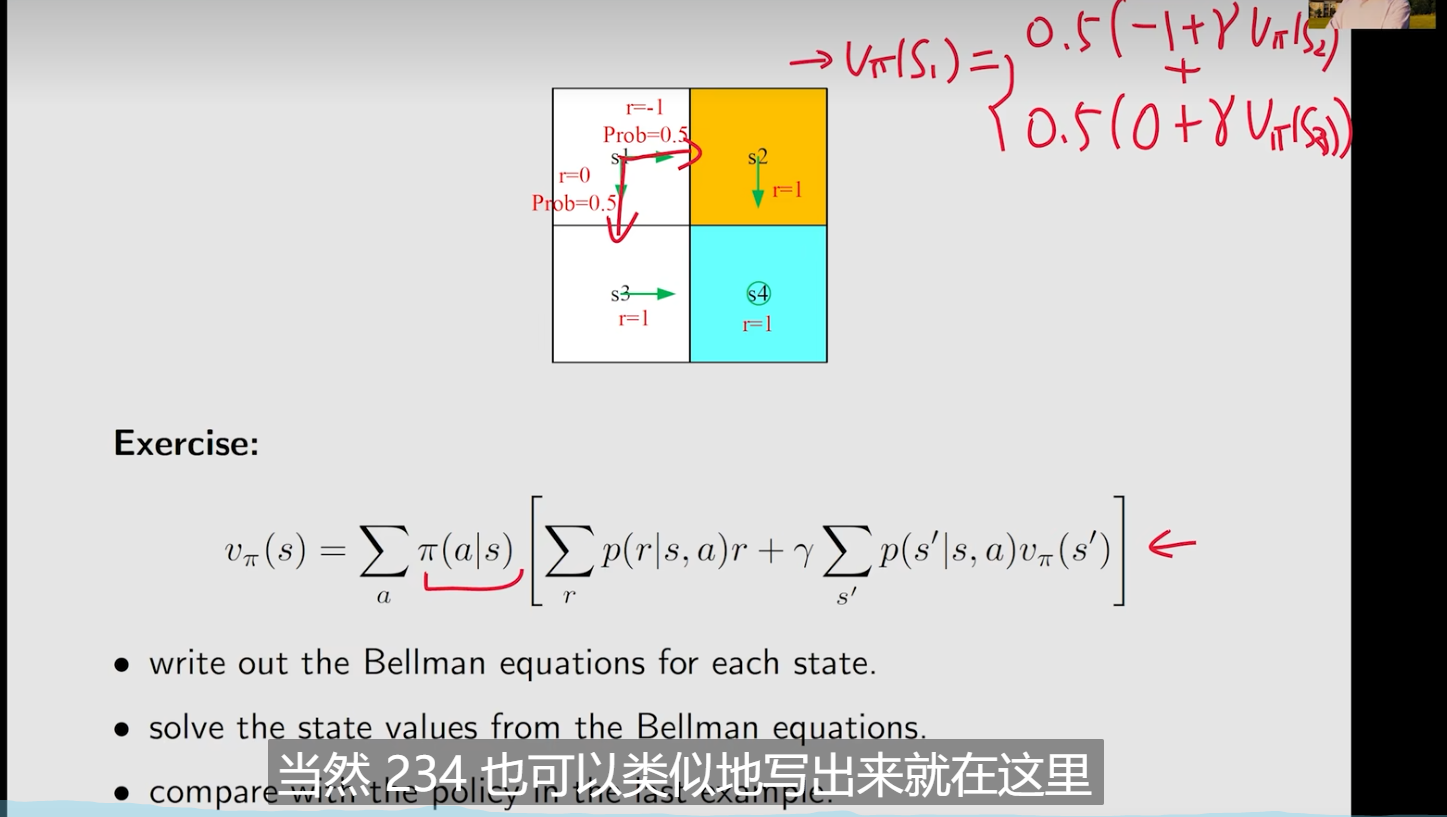
比较差的策略
action value
- action value
从一个状态和action出发得到的average return。当我们需要知道哪个action更加好时,使用action value
action value definition
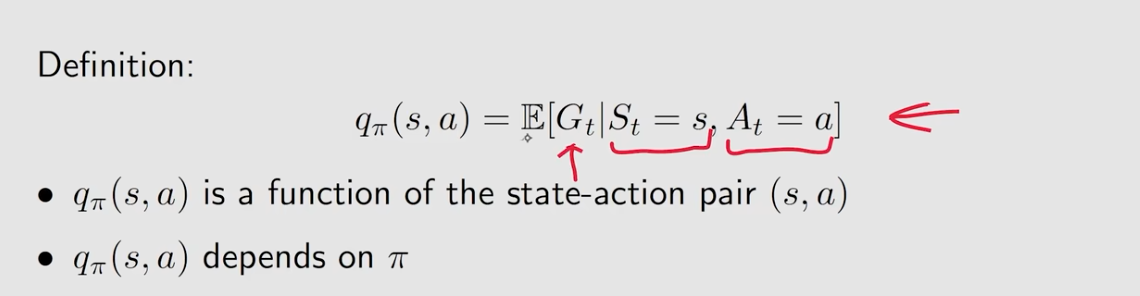
- 它是一个state-action函数
- 它依赖于策略Π
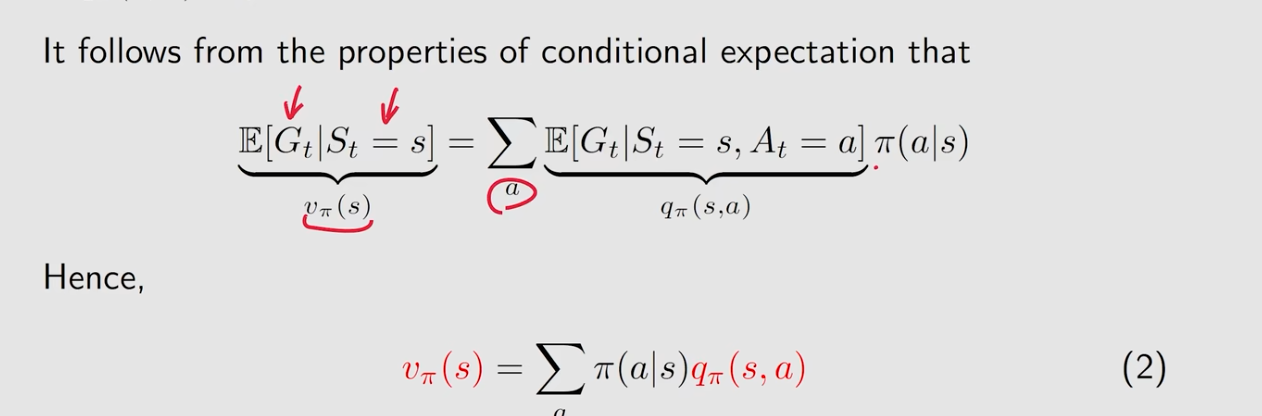
action value和state value的关系
=>
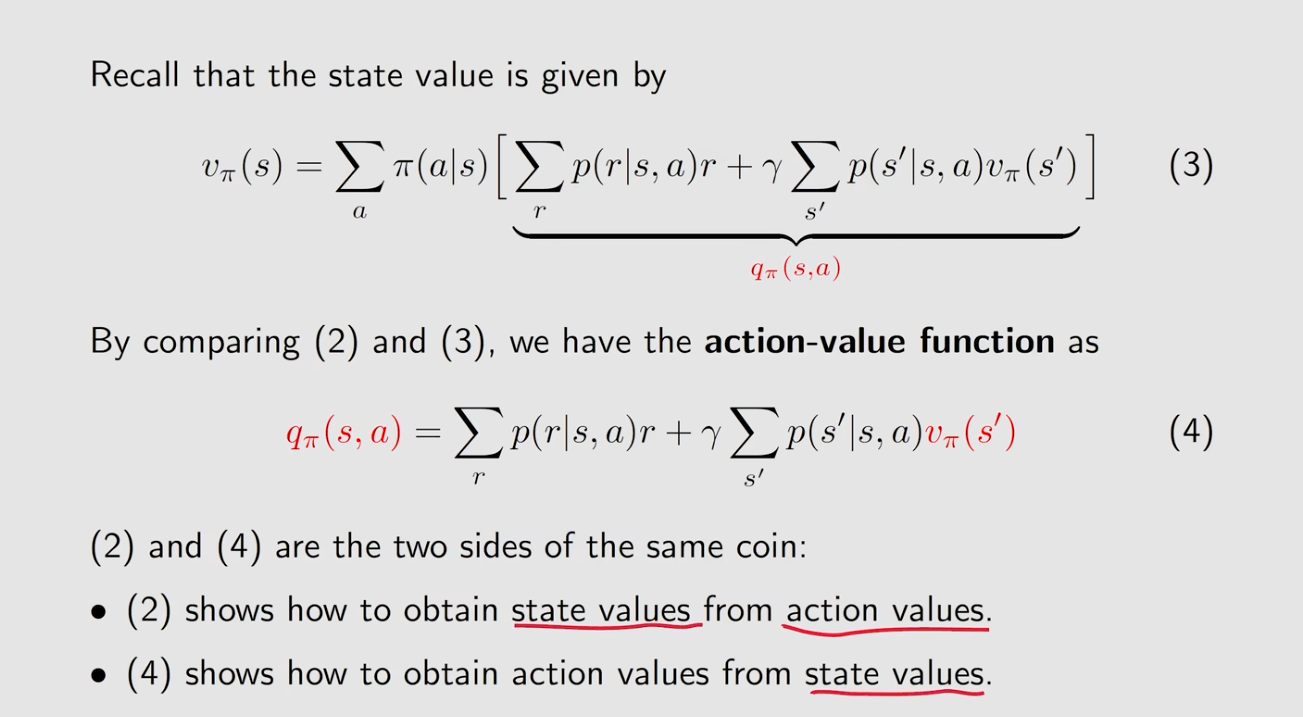
- 知道state value可以求得action value
- 知道action value可以求得state value
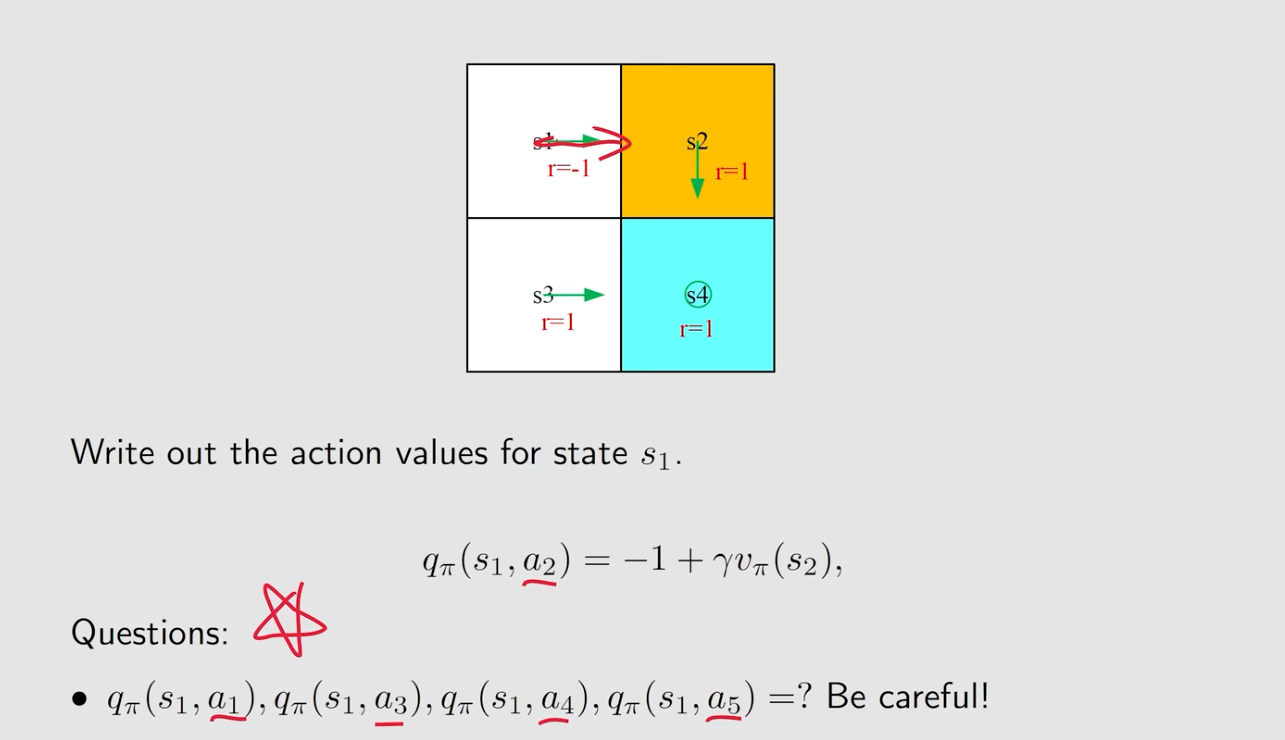
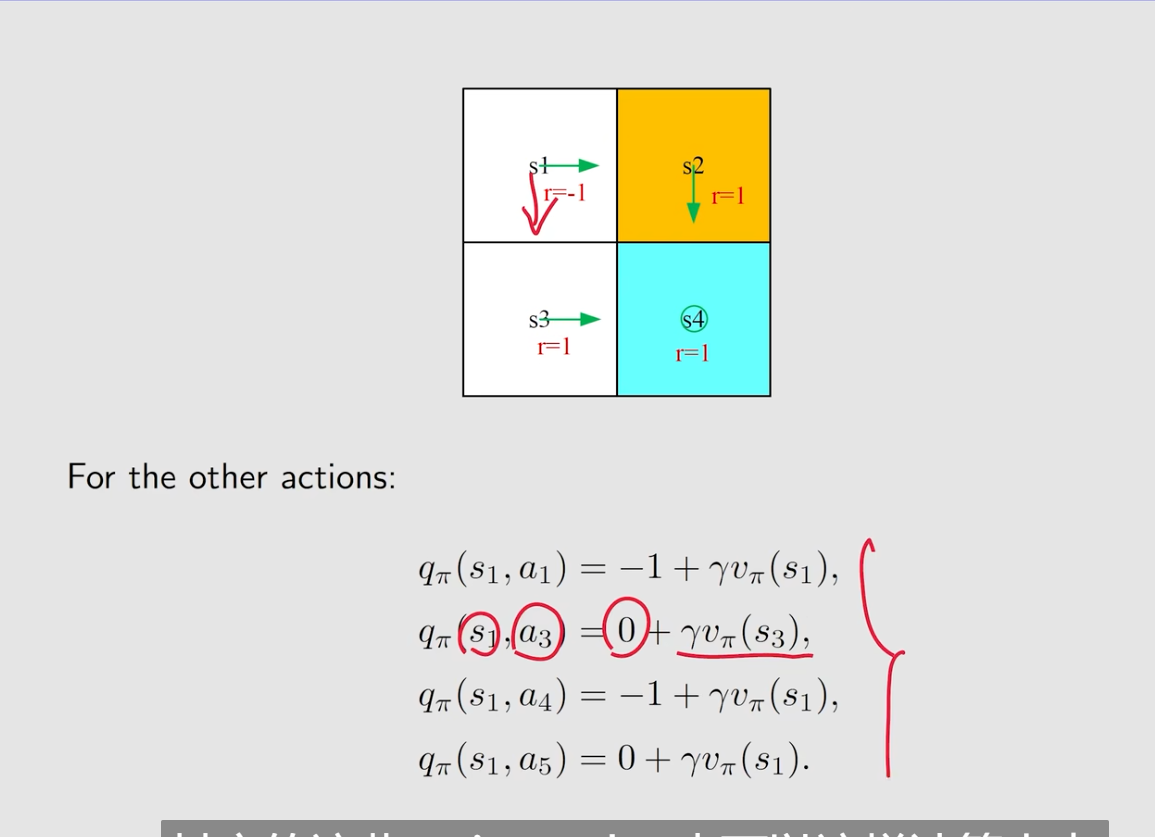
- 虽然这个策略只告诉我们a2,但是实际上每一个action的action value都需要计算
- 比如
,撞墙为-1分,
因为撞墙还是可以回来







![Java 面向对象设计一口气讲完![]~( ̄▽ ̄)~*(上)](https://img-blog.csdnimg.cn/img_convert/4647be320dd95a556df0c8a3793d2e24.png)










