硬件配置与参数
硬件配置
| 名称 | 型号 | 数量 |
| PLC | 1512C-1 PN | 1个 |
| 伺服放大器 | V90 PN | 1个 |
| 伺服电机 | SIMOTICS | 1个 |
V90 PN伺服驱动器:
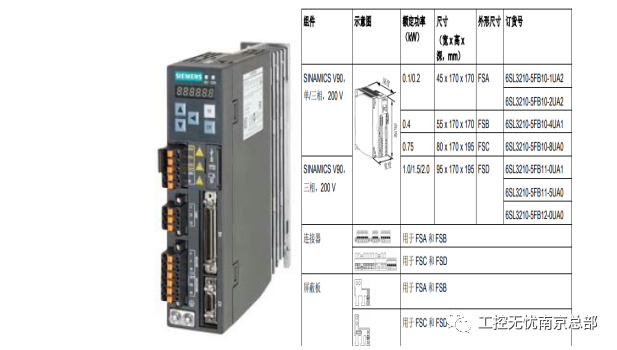

伺服驱动器硬件参数
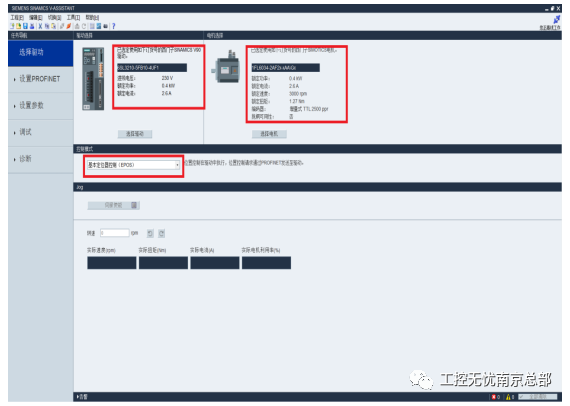
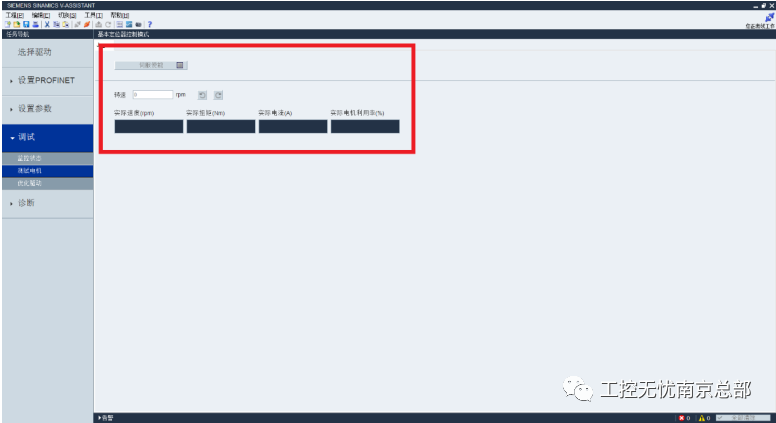
使用软件:V-ASSISTANT

软件连接时可选择USB连接或者Ethernet连接,根据实际情况选择
选择好连接方式后点击确定,等待驱动器响应,响应完成后出现订货号,点击确定即可
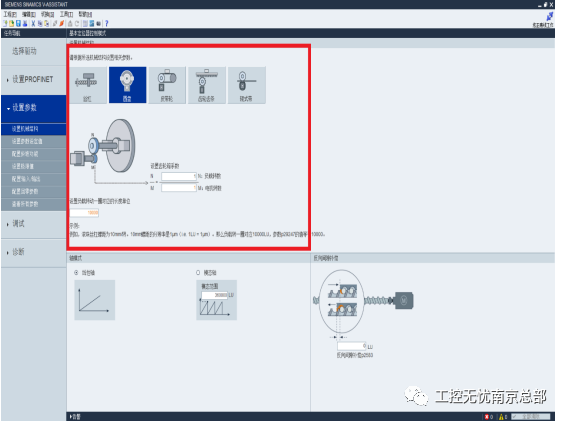
检查驱动与电机型号是否正确,并将控制模式更改为基本定位控制
设置伺服硬件减速比和负载转动一圈的长度单位(本例在程序中控制,设置中使用默认值不更改)
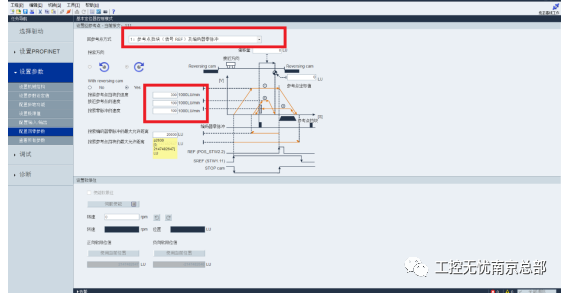
配置回零参数:我们选择参考点挡块及编码器零脉冲
回零方式:参考点挡块及编码器零脉冲
参考点挡块
编码器零脉冲
设置搜索参考点速度、接近参考点速度、搜索编码器零脉冲速度
驱动器通讯参数
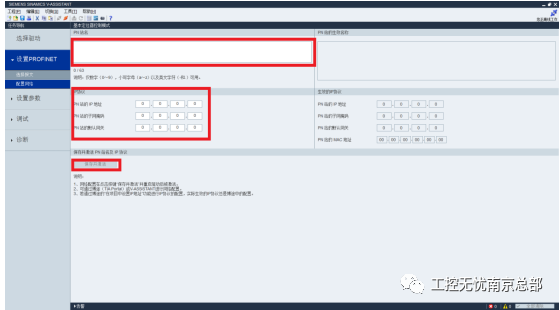
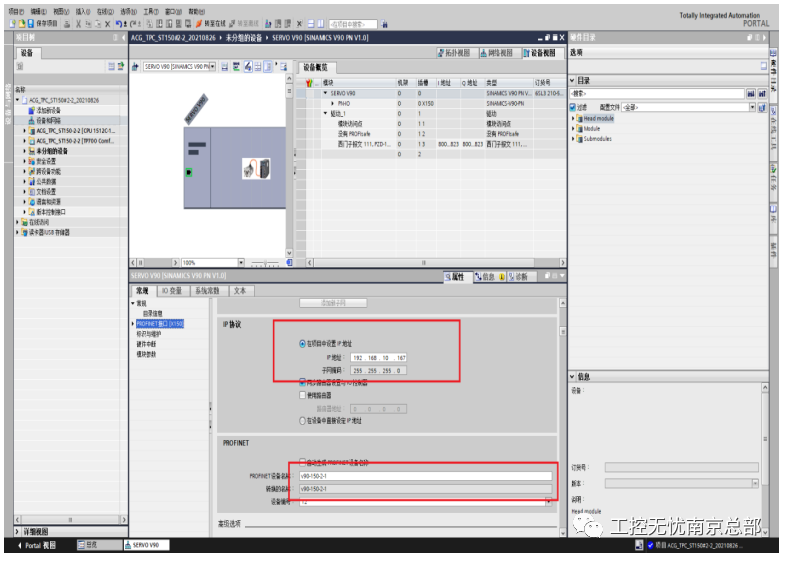
给驱动器设置PORFINET参数
PN站名:驱动名称可自定义设定(通讯时会用到)
IP地址:为驱动分配IP地址,要求和PLC同一网段但不重复
以上设置完成后点击保存并激活,完成后重启驱动器
选择报文:EPOS控制模式推荐使用111报文
下面是控制字和状态字的当前状态
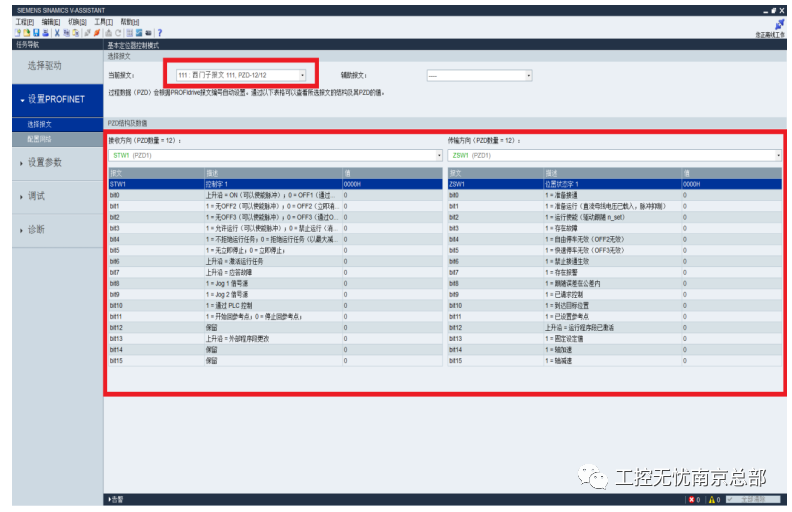
设置完成后可以使用软件自动调试测试电机
PLC通讯参数设置
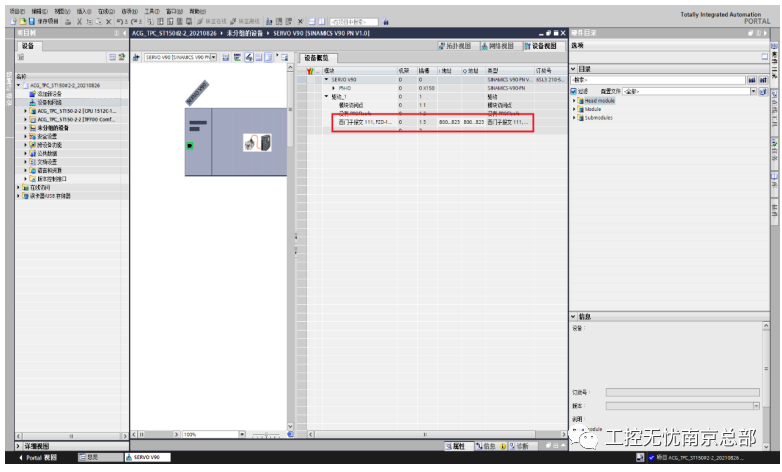
硬件添加
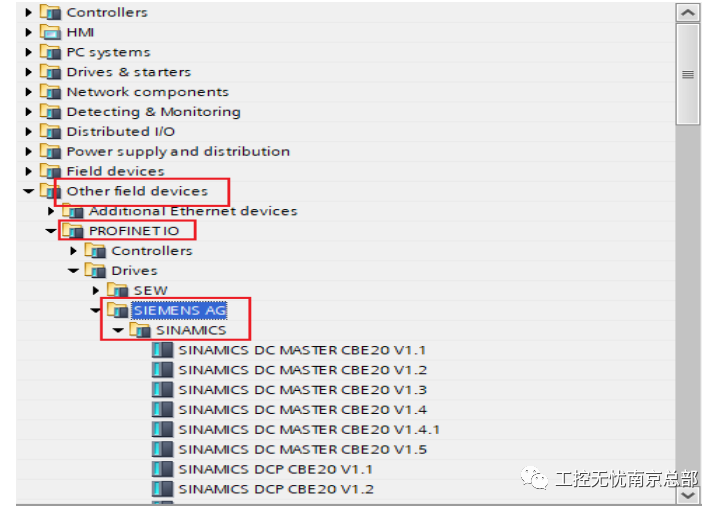
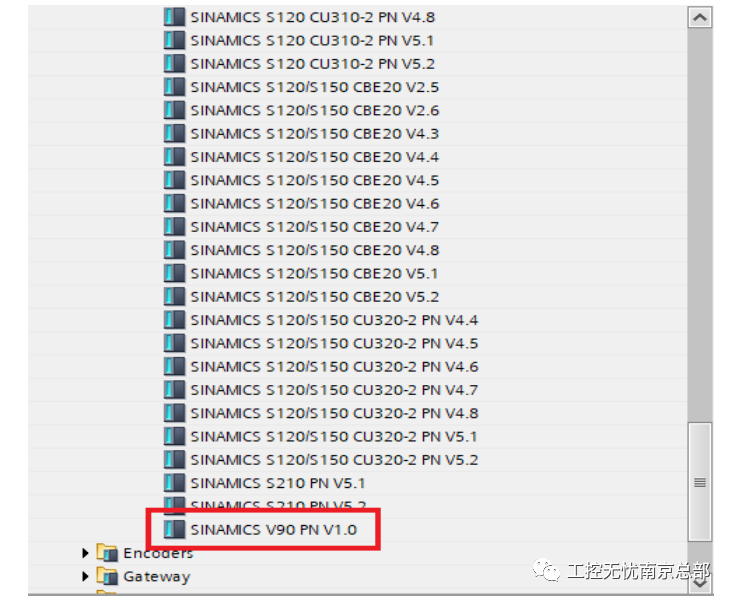
将V90 PN GSD描述文件拖拽到设备视图中,拖拽网口连接到网络
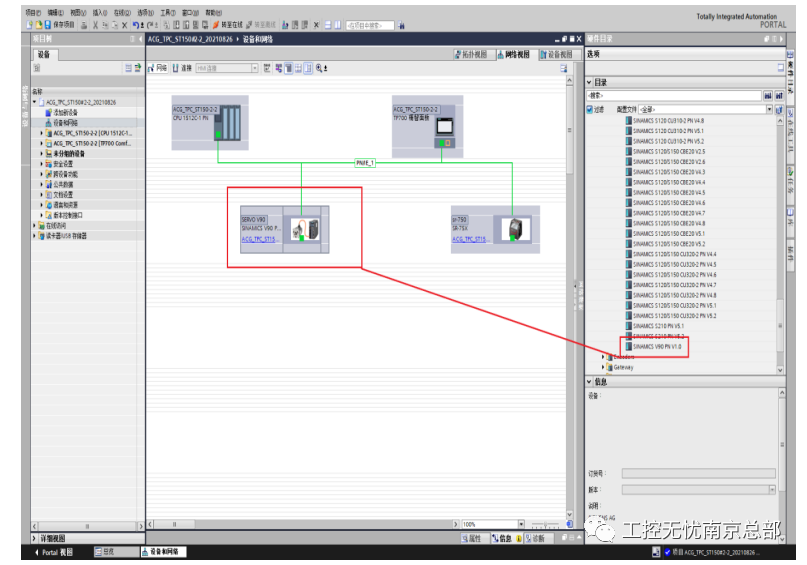
设置V90 PN的IP地址和设备名称(设备名称和V-ASSISTANT中设置的保持一致)
给V90 PN分配IO地址
FB284 EPOS 控制功能块(EPOS功能块可以在西门子官网下载)
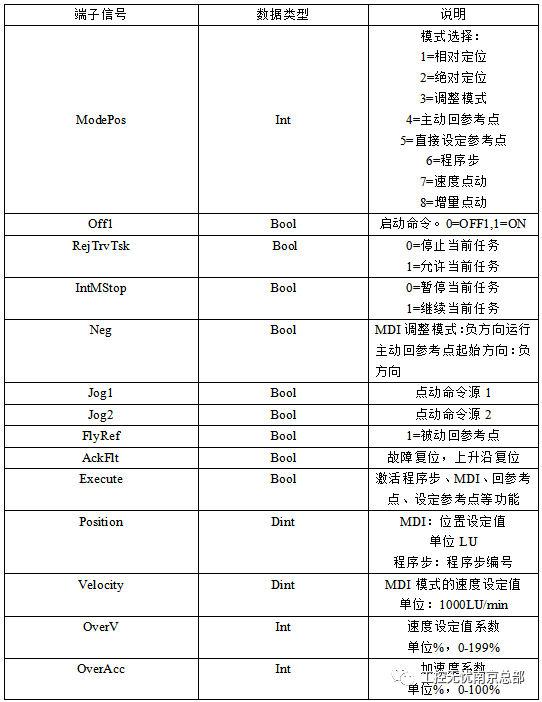
①EPOS 功能块输入
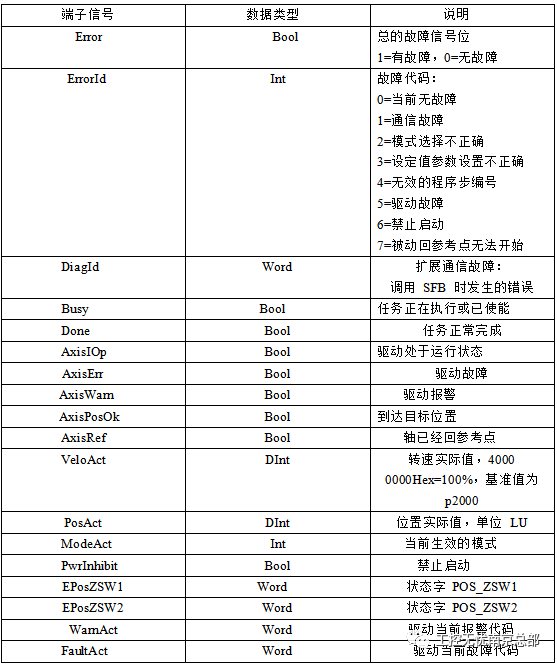
②EPOS 功能块输出
③EPOS控制模式程序编写
首先对功能块进行调用,并给功能块接口进行赋值
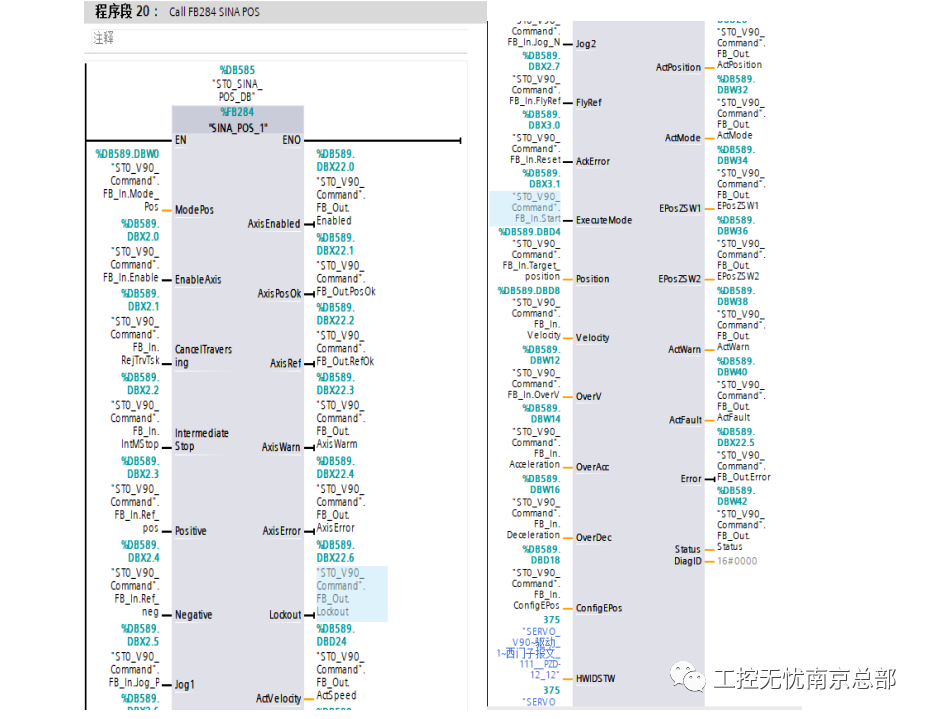
通过控制赋予接口输入的值来实现控制
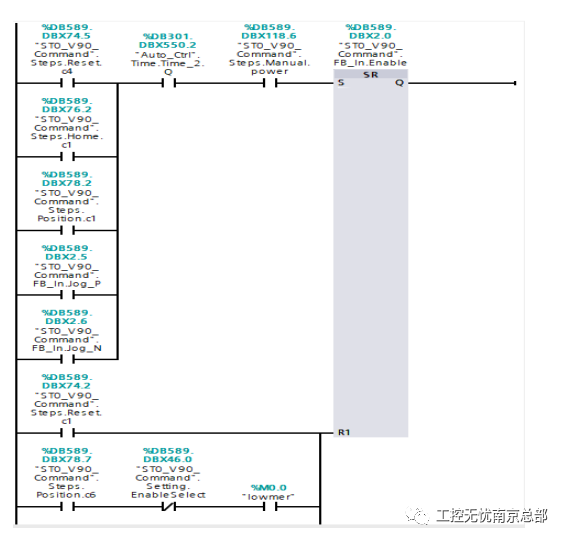
例如:伺服使能,通过置位复位控制块输入接口的使能变量就可以了
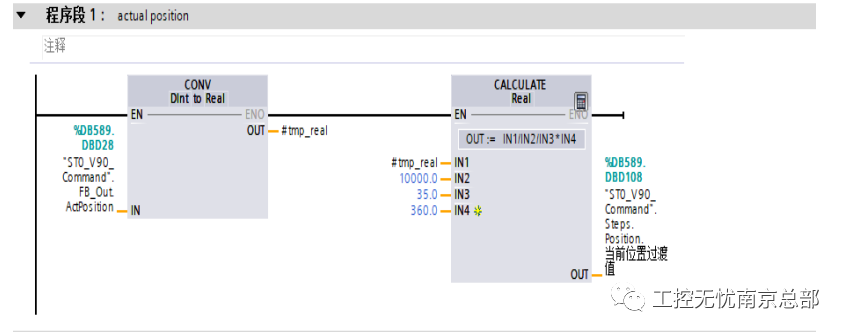
因为我们在伺服参数里减速比和负载一圈长度单位都为默认,所有需要编写程序来计算当前值、位置设定值、速度,如下:
当前值
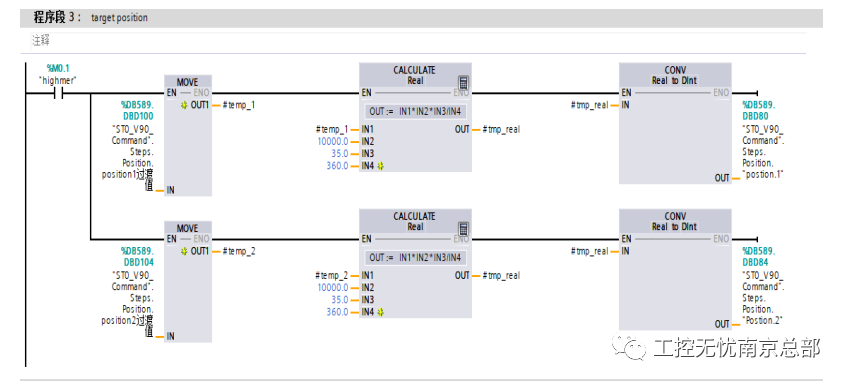
位置设定值
速度设定值

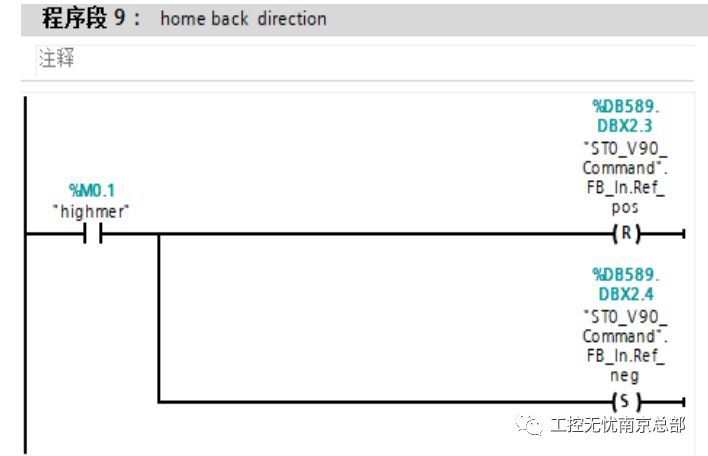
原点回归方向:通过控制块输入接口Refpos和Refneg的高低电平来实现
定位启动:在设定好位置、速度等数据后给块输入接口Start上升沿即可触发定位

复位:在轴有错误报警时使用块输入接口的Reset来复位

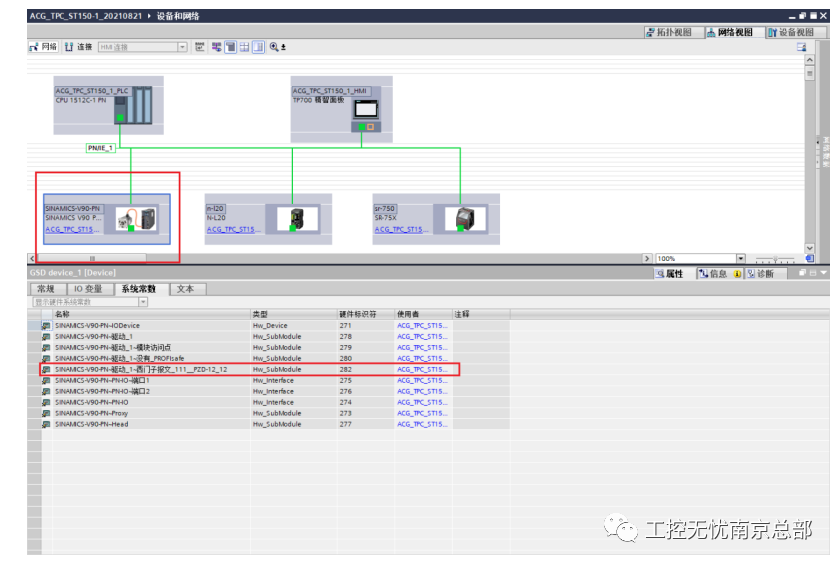
硬件标识符:块输入接口HWIDSTW、HWIDZSW是西门子报文的硬件标识符

在设备视图中选择伺服的属性—系统常数—西门子报文111,本例中硬件标识符为282
所以在HWIDSTW、HWIDZSW接口处填写282或者"SINAMICS-V90-PN~驱动_1~西门子报文_111__PZD-12_12"都可以。
总结:1500 PLC通过EPOS模式控制V90伺服时PLC端和伺服驱动器端的IP地址和设备名称必须要设置统一,硬件标识符必须要找对,块接口含义一定要熟悉(包括触发方式:高电平、低电平、上升沿、下降沿)。






![[Linux]从零开始的Linux的远程方法介绍与配置教程](https://i-blog.csdnimg.cn/direct/38462135f48b4fc68a449a572d07c377.png)