一、单个无人机路径规划模型介绍
无人机三维路径规划是指在三维空间中为无人机规划一条合理的飞行路径,使其能够安全、高效地完成任务。路径规划是无人机自主飞行的关键技术之一,它可以通过算法和模型来确定无人机的航迹,以避开障碍物、优化飞行时间和节省能量消耗。

二、无人机集群模型介绍
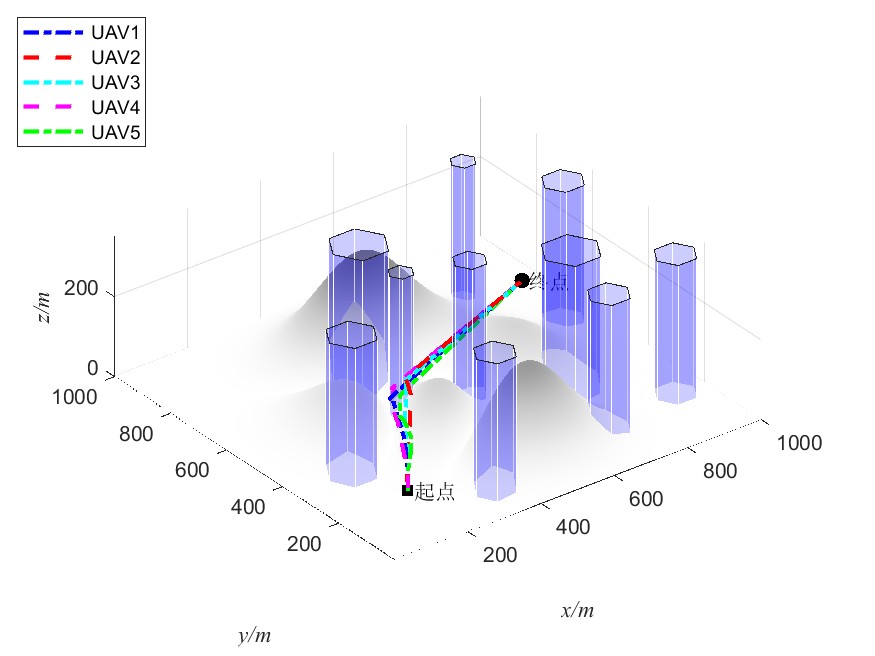
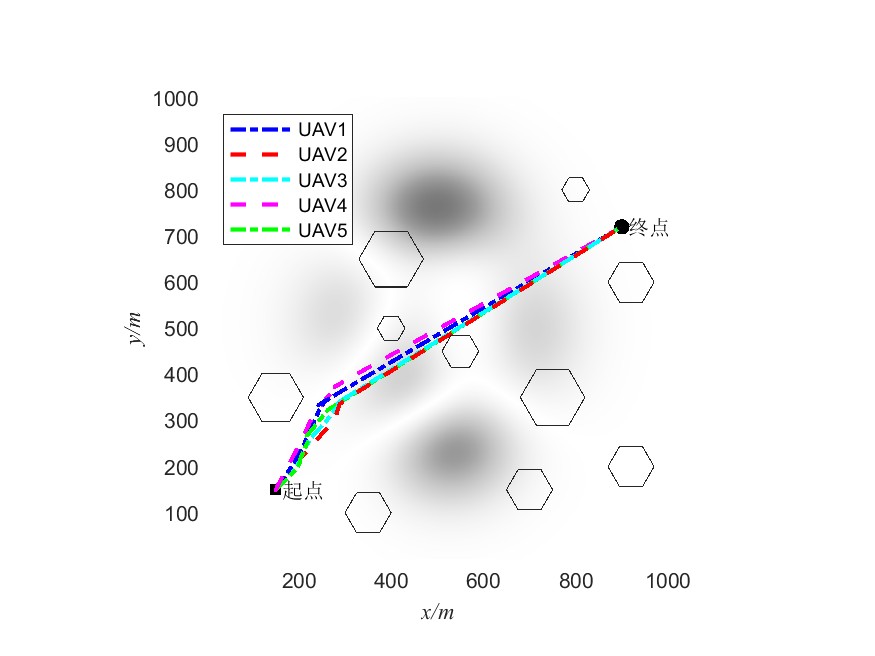
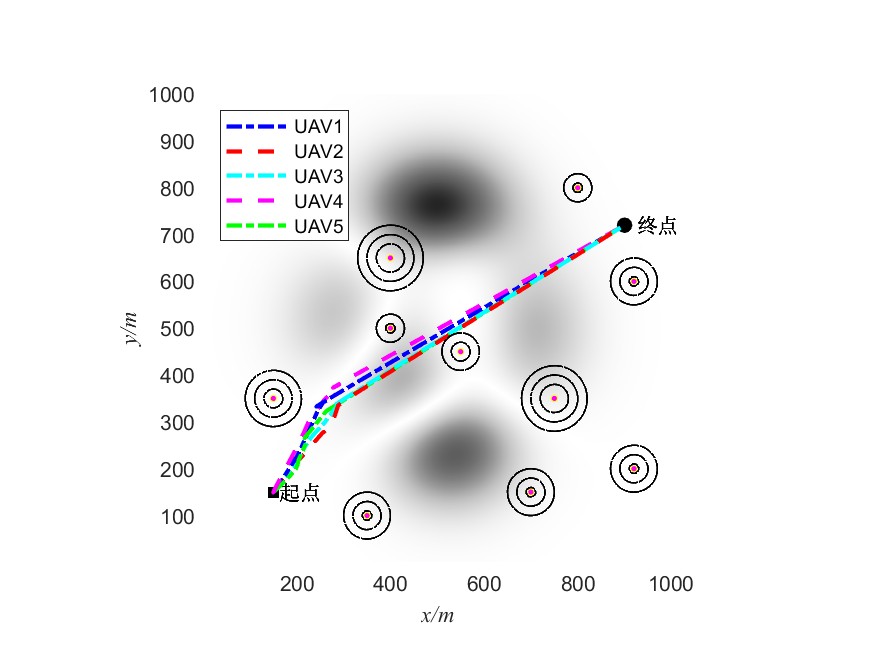
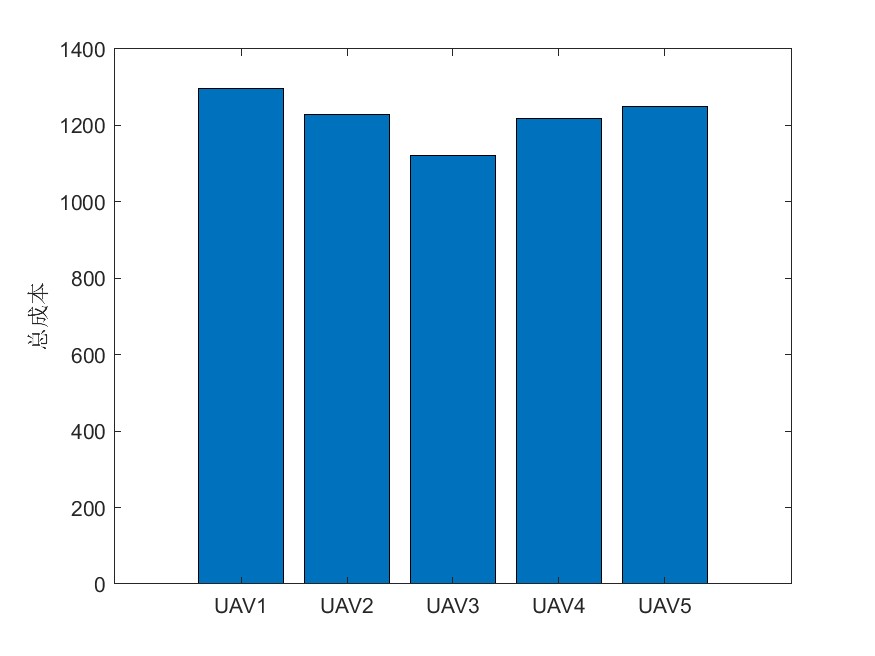
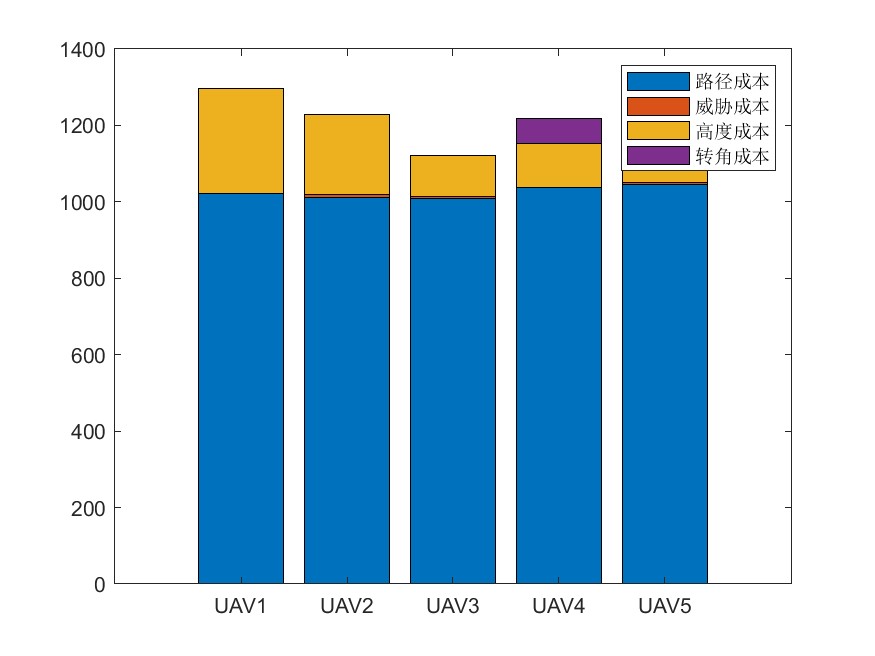
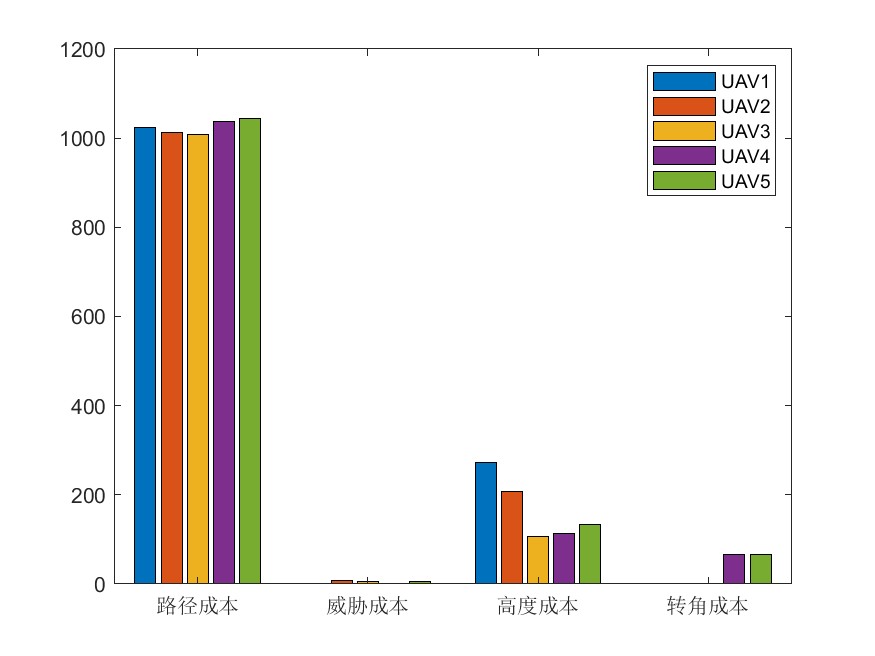
本文中以5个无人机构成无人机集群,采用优化算法同时规划五个无人机的路径,每个无人机的成本由路径成本、威胁成本、高度成本和转角成本四个部分构成。无人机集群的总成本为5个无人机成本之和。
三、 麻雀搜索算法求解无人机集群路径规划
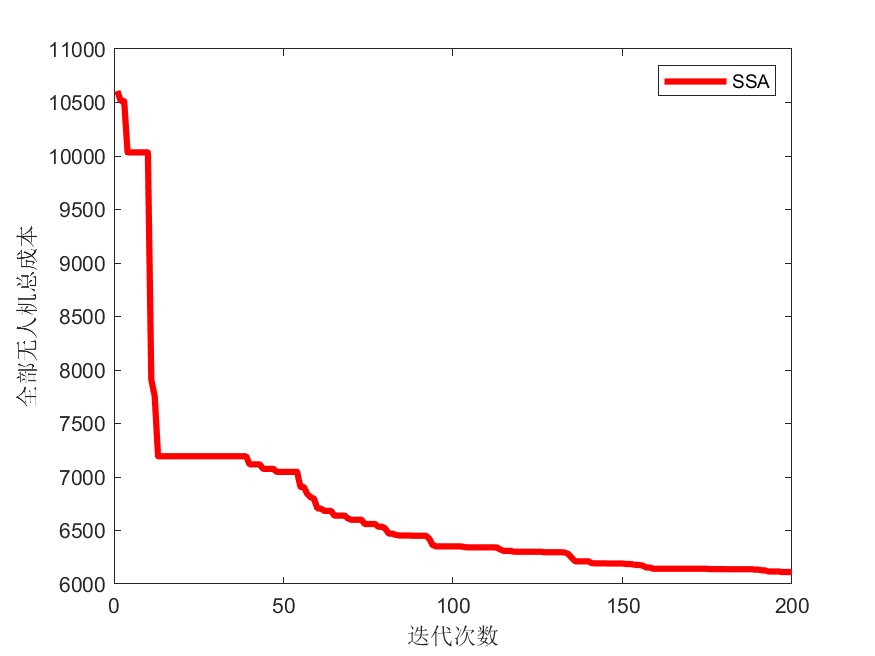
麻雀搜索算法(Sparrow Search Algorithm, SSA)是于2020年提出的。SSA 主要是受麻雀的觅食行为和反捕食行为的启发而提出的。该算法比较新颖,具有寻优能力强,收敛速度快的优点
[1]薛建凯. 一种新型的群智能优化技术的研究与应用[D].东华大学,2020.
3.1部分代码
close all
clear
clc
dbstop if all error
global model
model = CreateModel(); % 创建模型
F='F1';
[Xmin,Xmax,dim,fobj] = fun_info(F);%获取函数信息
pop=50;%种群大小(可以自己修改)
maxgen=200;%最大迭代次数(可以自己修改)
[fMin,bestX,ConvergenceCurve] = (pop, maxgen,Xmin,Xmax,dim,fobj);
%% 计算无人机的相关信息
N=length(bestX)/(3*model.n);%无人机的数量
St=1;
for i=1:N %计算每个无人机的适应度值
Et=St+3*model.n-1;
Xbest=bestX(St:Et);
BestPosition(i,:) = SphericalToCart(Xbest);%% 计算航迹坐标
BestFit(i)=MyCost(Xbest,1);%% 计算每个无人机的适应度值
UAVfit(i,:)=MyCost(Xbest,2);
St=Et+1;
end
%% 保存结果
save BestPosition BestPosition %每个无人机的航迹坐标
save BestFit BestFit %每个无人机的总成本
save UAVfit UAVfit % 每个无人机的四个成本
save ConvergenceCurve ConvergenceCurve % 无人机集群的成本随迭代次数的变化3.2部分结果