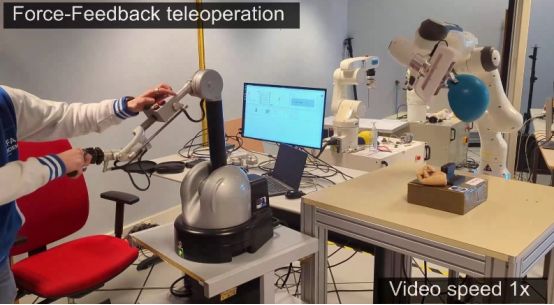
在工业、医疗、科研等多个领域,机器人遥操作正在成为一项关键技术,它允许操作者在远离实际工作环境的情况下,通过远程控制系统对机器人进行精准操作。Haption Virtuose力反馈设备作为遥操作系统中的重要组成部分,其应用优势日益凸显,为机器人遥操作带来了革命性的变革。
提高操作精确性和效率

力反馈设备能够在虚拟环境中提供真实的力觉反馈,使操作者能够实时感知到机器人与环境的交互力。这种实时力反馈机制大大减少了操作误差,提高了操作的精确性和效率。以Haption Virtuose 6D力反馈设备为例,它能够在6个自由度(X、Y、Z轴3个平移和3个旋转)上提供精确的力反馈,工作空间相当于一条人体手臂的活动范围,最大力度和旋转扭矩分别高达35N和3Nm,足以模拟重物操作和对大型虚拟对象的双手处理任务。这种高精度和高灵敏度的力反馈,使得操作者在远程操作时能够像在现场一样准确地控制机器人的运动。
增强操作安全性

在机器人遥操作中,安全性是至关重要的。力反馈设备通过提供真实的力觉反馈,使操作者能够感知到机器人执行操作时的反作用力,从而避免过度用力或误操作导致的安全事故。此外,一些先进的力反馈设备还具备安全特性,如Haption Virtuose 6D手柄上的感测器能够在用户未握持手柄或松开握柄时立即关闭机械马达,避免主动活动带来的安全隐患。这些安全特性进一步保障了操作的安全性。
拓展应用领域
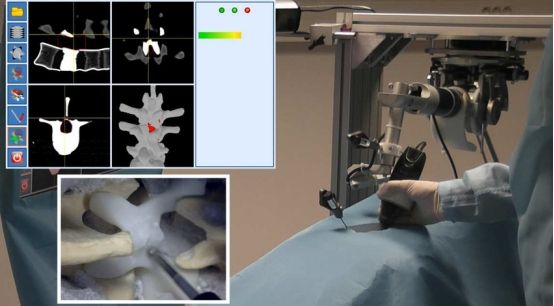
力反馈设备在机器人遥操作中的应用不仅局限于特定的工业或科研领域,而是具有广泛的应用前景。在医疗领域,力反馈设备可以用于手术模拟与培训、康复治疗与训练等方面,帮助医生提高手术技能,促进患者康复。在工业与科研领域,力反馈设备可以实现对复杂环境和危险任务的精准控制,提高工作效率和安全性。此外,力反馈设备还可以用于人机工程学研究与测试、功能测试、装配/拆卸仿真模拟、工作环境仿真、操作人员培训等多个领域。
提升用户体验
力反馈设备通过提供真实的力觉反馈,使得远程操作机器人成为一种更加直观、真实的体验。操作者可以像在现场一样感受到机器人的动作和受到的力,从而更加准确地控制机器人的运动和操作。这种沉浸式的体验不仅提高了操作的精确性和效率,还增强了操作者的参与感和满意度。
力反馈设备在机器人遥操作中的应用优势显著,包括提高操作精确性和效率、增强操作安全性、拓展应用领域以及提升用户体验等方面。随着技术的不断发展和应用领域的不断拓展,力反馈设备将在更多领域发挥重要作用,为机器人遥操作技术的发展提供有力支持。