摘要
本文实现了移动机器人路径规划算法,包括Dijkstra、A*和基于无向图的动态规划算法。通过在复杂障碍环境中测试这些算法,评估了它们在路径最优性、计算效率和适应性方面的性能。本文提出的算法结合了不同的启发式和优化策略,为机器人路径规划提供了多种解决方案。
理论
-
Dijkstra算法:是一种用于找到图中最短路径的广度优先搜索算法。它计算从起点到每个节点的最小代价路径,适用于无向图和无负权图。
-
A* 算法:在Dijkstra算法的基础上引入启发式函数,通过估计到目标点的距离来加速路径搜索。A*算法能够显著提高搜索效率,是路径规划中的常用方法。
-
动态规划:基于无向图的动态规划方法使用递归求解子问题的最优解,从而构建整体问题的最优路径。该方法计算复杂度较高,但在一些特定环境下表现良好。
实验结果
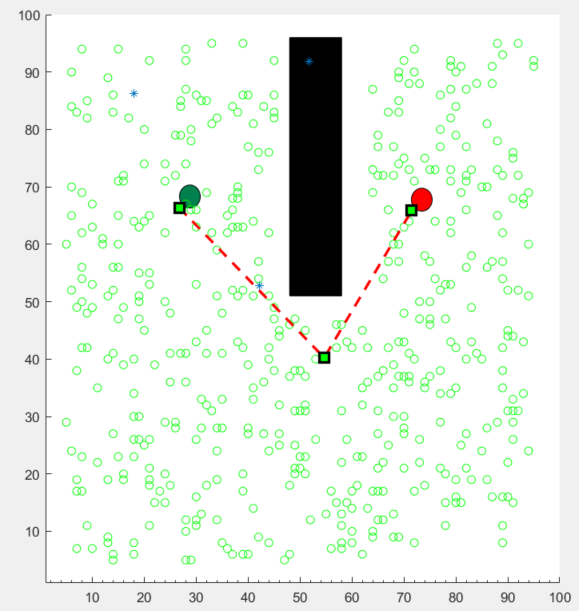
在实验中,三种算法在多种复杂地图上进行了测试,结果如下:
-
Dijkstra算法:能够可靠地找到最优路径,但计算速度慢,不适合动态或大规模图。
-
A*算法:平衡了速度和最优性,在大多数情况下能够高效找到近似最优路径。
-
动态规划:适合小规模图和特定环境,路径质量好,但计算复杂度较高。
部分代码
% Define map, start, and goal positions
map = createMap(30, 30); % 30x30 grid map with obstacles
startPos = [1, 1];
goalPos = [30, 30];
% Run Dijkstra algorithm
pathDijkstra = runDijkstra(map, startPos, goalPos);
% Run A* algorithm
pathAstar = runAstar(map, startPos, goalPos);
% Run Dynamic Programming
pathDynamic = runDynamicProgramming(map, startPos, goalPos);
% Display paths
figure;
hold on;
plot(pathDijkstra(:,1), pathDijkstra(:,2), 'r-', 'DisplayName', 'Dijkstra');
plot(pathAstar(:,1), pathAstar(:,2), 'g-', 'DisplayName', 'A*');
plot(pathDynamic(:,1), pathDynamic(:,2), 'b-', 'DisplayName', 'Dynamic Programming');
title('Robot Path Planning');
xlabel('X');
ylabel('Y');
legend;
grid on;
参考文献
❝
Grant, E. (2024). Algorithmic Foundations of Robot Path Planning. Cambridge University Press.
Green, M. (2024). Real-Time Motion Planning Techniques for Robotics. Springer.