目录
- 1 简介
-
- 1.1 架构概览
- 2 功能描述
-
- 2.1 特性
- 2.2 初始化
- 2.3 状态机
-
- 2.3.1 网络模式
-
- 2.3.1.1 重复报文状态
- 2.3.1.2 正常状态
- 2.3.1.3 准备休眠状态
- 2.3.2 预休眠模式
- 2.3.3 总线休眠模式
- 2.4 被动模式(对于被动节点)
- 2.5 NM报文格式
- 2.6 NM报文发送
-
- 2.6.1 重试第一次报文请求
- 2.7 降低总线负载
- 2.8 支持接收不同长度PDU
- 2.9 节点检测
- 2.10 通信控制
- 2.11 网关功能
-
- 2.11.1 远程休眠指示和取消
- 2.11.2 总线同步
- 2.12 协调器同步
- 2.13 主动唤醒
- 2.14 即时NM报文发送
-
- 2.15 汽车唤醒
-
- 2.15.1 接收路径
- 2.15.2 发送路径
- 2.16 局部网络
-
- 2.16.1 局部网络请求信息的可用性
- 2.16.2 在NM用户数据中发送CRI位
- 2.16.3 接收NM报文的过滤算法
- 2.16.4 请求的PN的聚合
- 2.16.5 自发发送NM报文
-
- 2.16.5.1 使用通信发送变化机制
- 2.16.5.2 使用NM请求和立即NM发送
- 2.17 故障处理
- 3 集成
-
- 3.1 静态文件
- 3.2 动态文件
- 4 API描述
- 5 配置
1 简介
本文主要描述了AUTOSAR CanNm模块的功能。
CanNm主要用途是协调CAN网络从正常模式到总线休眠模式的切换。当然它也可以用来实现检测现存的节点或准备休眠的节点。
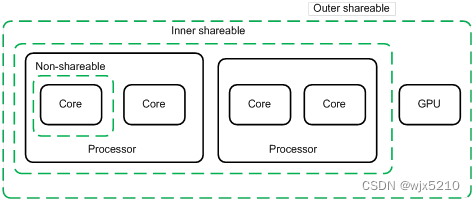
1.1 架构概览
CanNm在AUTOSAR软件架构中的位置如图所示(下图来源于Vector MICROSAR软件架构)。

下图展示了CanNm与相邻模块的接口。
注意:
CanNm不会直接给用户程序提供服务接口。

2 功能描述
网络管理是一个网络的综合协议,为整车网络提供了服务。网络管理协议具有去中心化和直接的特点。通俗的来说就是整车中各个ECU通过一个专门用来管理网络的报文网络管理报文来管理网络,每个ECU的网络管理报文都不同。