Open3D 近似点体素滤波(36)
news2026/4/3 11:27:01

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/2073443.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章

学习文件IO,让你从操作系统内核的角度去理解输入和输出(Java实践篇)
本篇会加入个人的所谓鱼式疯言
❤️❤️❤️鱼式疯言:❤️❤️❤️此疯言非彼疯言
而是理解过并总结出来通俗易懂的大白话,
小编会尽可能的在每个概念后插入鱼式疯言,帮助大家理解的.
🤭🤭🤭可能说的不是那么严谨.但小编初心是能让更多人…

【在Linux世界中追寻伟大的One Piece】应用层协议HTTP
目录
1 -> HTTP协议
2 -> 认识URL
2.1 -> urlencode和urldecode
3 -> HTTP协议请求与响应格式
3.1 -> HTTP请求
3.2 -> HTTP响应
4 -> HTTP的方法
4.1 -> HTTP常见方法
5 -> HTTP的状态码
6 -> HTTP常见Header
7 -> 最简单的HTTP服…

Linux系统报错“version ‘GLIBC_2.34‘ not found”解决方法
注意,此文章慎用,glibc不可随意升级,可能导致系统崩溃 一、查看版本
ldd --version 二、添加高版本源
sudo vi /etc/apt/sources.list.d/my.list 进入编辑页面
"i"键进入插入模式
输入源
deb http://th.archive.ubuntu.com/…

【信创】推荐一款超级好用的文件同步备份工具 _ 统信 _ 麒麟 _ 方德
往期好文:【信创】统信UOS打包工具介绍与使用教程 Hello,大家好啊!今天给大家推荐一款在Linux系统上超级好用的文件同步和备份工具——FreeFileSync。无论是在日常工作还是数据管理中,文件同步和备份都是至关重要的任务。FreeFile…

【自动驾驶】控制算法(五)连续方程离散化与离散LQR原理
写在前面: 🌟 欢迎光临 清流君 的博客小天地,这里是我分享技术与心得的温馨角落。📝 个人主页:清流君_CSDN博客,期待与您一同探索 移动机器人 领域的无限可能。 🔍 本文系 清流君 原创之作&…

QT6 setCentralWidget 和 takeCentralWidget
qt6 中,初始化界面完成之后,可以使用setCentralWidget 设置当前的widget为中心页面
如果你存在多个widget想要多个切换
如果存在widget1 和 widget2
在初始化的时候 setCentralWidget(widget1)触发操作切换到 widget2
如果没有先takeCentralWidget 直…
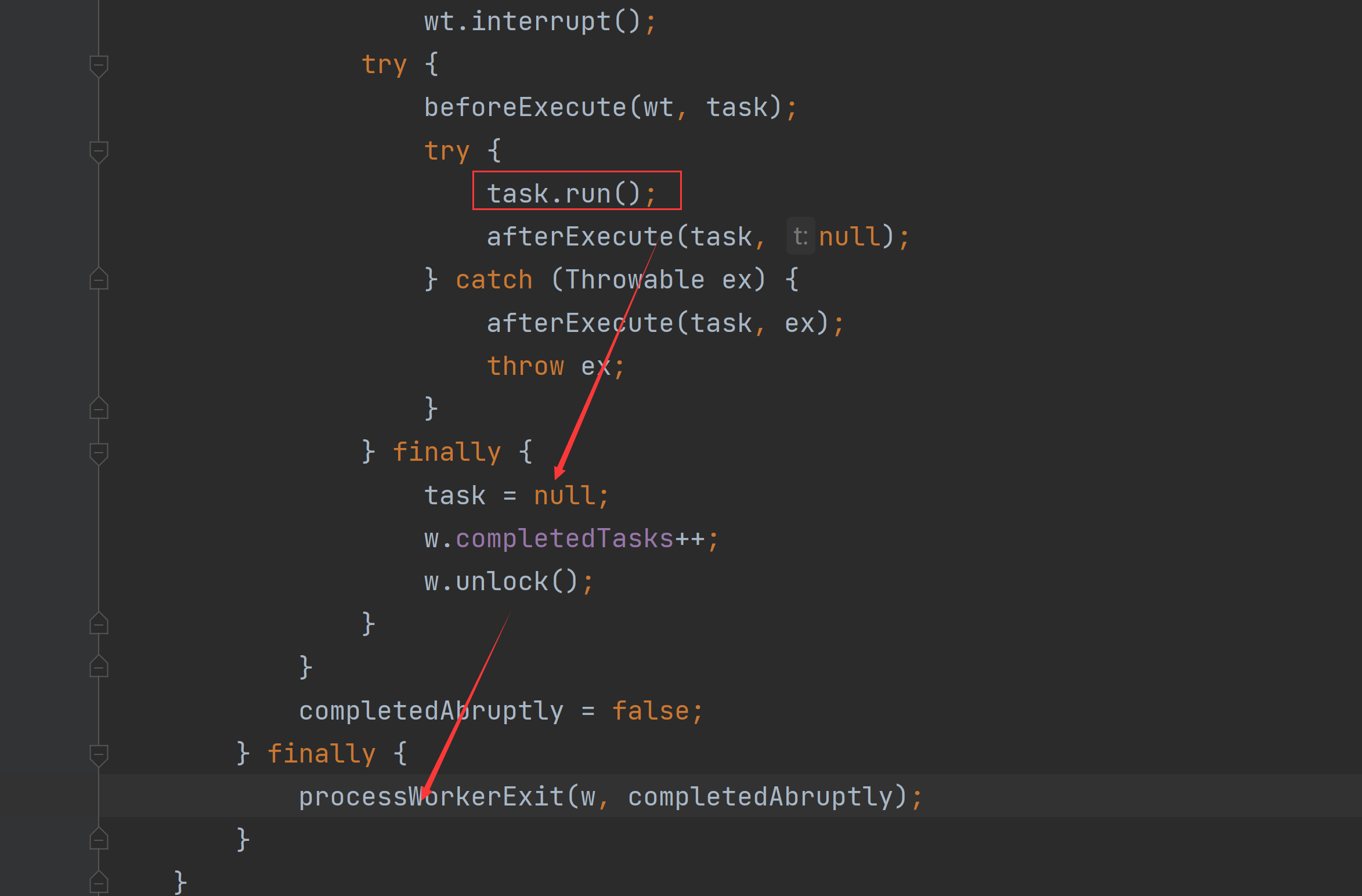
13.深入解析ThreadPoolExecutor线程池
ThreadPoolExecutor线程池 线程池简介线程池的使用创建线程池ThreadPoolExecutor——推荐使用线程池的核心参数 Executors——不推荐使用 提交任务如何执行批量任务如何执行定时、延时任务如何执行周期、重复性任务 关闭线程池线程池的参数设计分析核心线程数(corePoolSize)最大…

EEMD-MPE-KPCA-BiLSTM、EEMD-MPE-BiLSTM、EEMD-PE-BiLSTM故障识别、诊断(Matlab)
EEMD-MPE-KPCA-BiLSTM(集合经验分解-多尺度排列熵-核主元分析-双向长短期网络)故障识别、诊断(Matlab) 目录 EEMD-MPE-KPCA-BiLSTM(集合经验分解-多尺度排列熵-核主元分析-双向长短期网络)故障识别、诊断(Matlab)效果一览基本介绍程序设计参考资料 效果一…

RK3588人工智能开发----【1】初识NPU
NPU 的诞生! 随着人工智能和大数据时代的到来,传统嵌入式处理器中的CPU和GPU逐渐无法满足日益增长的深度学习需求。为了应对这一挑战,在一些高端处理器中,NPU(神经网络处理单元)也被集成到了处理器里。NPU的…

【GNSS射频前端】MA2769初识
MAX2769 芯片概述: MAX2769是一款单芯片多系统GNSS接收器,采用Maxim的低功耗SiGe BiCMOS工艺技术。集成了包括双输入低噪声放大器(LNA)、混频器、图像拒绝滤波器、可编程增益放大器(PGA)、压控振荡器&#…

note38:tdsql数据库迁移
数据迁移过程中遇到的具体问题:
①提供给系统团队的表结构与生产不一致,导致脚本报错。因为历史遗留问题,存在部分直接在生产环境更改字段长度或添加索引的情况,导致测试环境和生产环境的表结构不同步。
今后所有生产的变动&…

Vulkan 学习(5)---- Vulkan 内存分配
目录 Overview枚举内存信息分配内存内存映射 Overview
Vulkan 将内存管理的工作交给了开发者自己负责,如何分配内存,如何指定内存策略都是由开发者自己决定的,当然处理问题也是由开发者自己负责的
Vulkan 将内存划分为两大类:主…

Android自定义简单仿QQ运动步数进展圆环
实现效果主要效果分为三个部分: 1.固定蓝色的大圆弧 color borderWidth 2.可以变化的小圆弧(红色) color borderWidth 3.中间的步数文字 color textSize
drawArc方法 startAngle 确定角度的起始位置 sweepAngle 确定扫过的角度 useCenter 是否使用中心:…

MyBatis XML配置文件(下)
MyBatis的开发有两种方式:1、注解 2、XML。使用MyBatis的注解方式,主要是来完成一些简单的增删改查功能。如果需要实现复杂的SQL功能,建议使用XML来配置映射语句,也就是将SQL语句写在XML配置文件中。 MyBatis XML开发的方式需要以…

UE5学习笔记17-让人物的视线和鼠标移动时的方向一致,并且不让人物模型旋转,只改变视线方向
一、创建标准动画帧 1.我想让人物在装备武器后根据鼠标的移动方向改变人物的视线方向,并且人物模型不会改变朝向 2.我的动画中存在一个四个方向瞄准的动画,将左下,坐上,左转,右上,右下,右转&…

C++ 设计模式——组合模式
C 设计模式——组合模式 C 设计模式——组合模式1. 主要组成成分2. 逐步构建透明组合模式1. 定义抽象组件(Component)2. 实现叶子组件(Leaf)3. 实现组合组件(Composite)4. 主函数(Mainÿ…

Linux磁盘操作之du命令
使用du命令,您可以查看指定目录或文件的磁盘使用量总计。这对于了解特定目录或文件占用的磁盘空间大小非常有用,可以帮助您进行磁盘空间管理和清理。
参数说明
du是一个用于显示目录或文件的磁盘使用情况的命令,du是disk usage的缩写&#…

从图像到视频:Web Codecs API编码技术解析
初探Web Codecs API 三
前言
在之前的文章中,咱们简单的介绍了解码相关的东西,这一节咱们来简单聊聊编码相关的东西。
编码的目的就是为了压缩,去除空间、时间维度的冗余。
这里又不得不提起前面所说的I 帧、P 帧、B 帧和 IDR 帧。
众所周知,视频是连续的图像序列,由…

【添加核心机械臂动力学】Model and Control a Manipulator Arm with Robotics and Simscape
机械臂动力学
为了设计控制器,机械臂动力学必须表示给定力矩输入的关节位置。这在机械臂动力学子系统中通过一个前向动力学块实现,该块将关节力矩转换为给定当前状态的关节加速度,然后通过两次积分得到完整的关节配置。积分器初始化为q0和dq…