Apollo9.0 PNC源码学习之Planning模块—— Lattice规划(五):横向运动轨迹规划
news2026/2/12 11:05:40

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/2071765.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章
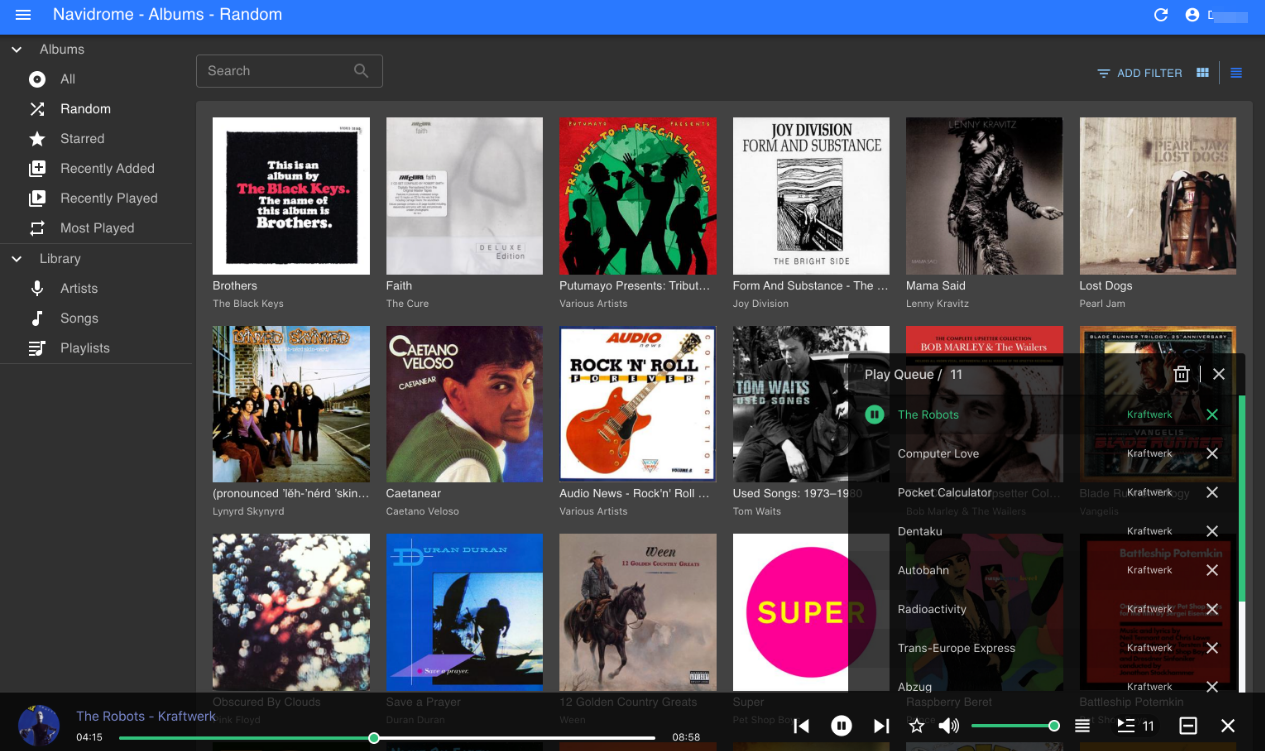
Linux环境使用docker搭建Navidrome本地个人音乐库并实现远程访问
文章目录 前言1. 安装Docker2. Docker镜像源添加方法3. 创建并启动Navidrome容器 前言
本文和大家分享一款目前在G站有11KStar的开源跨平台音乐服务器Navidrome,如何在Linux环境本地使用Docker部署,并结合cpolar内网穿透工具配置公网地址,实…
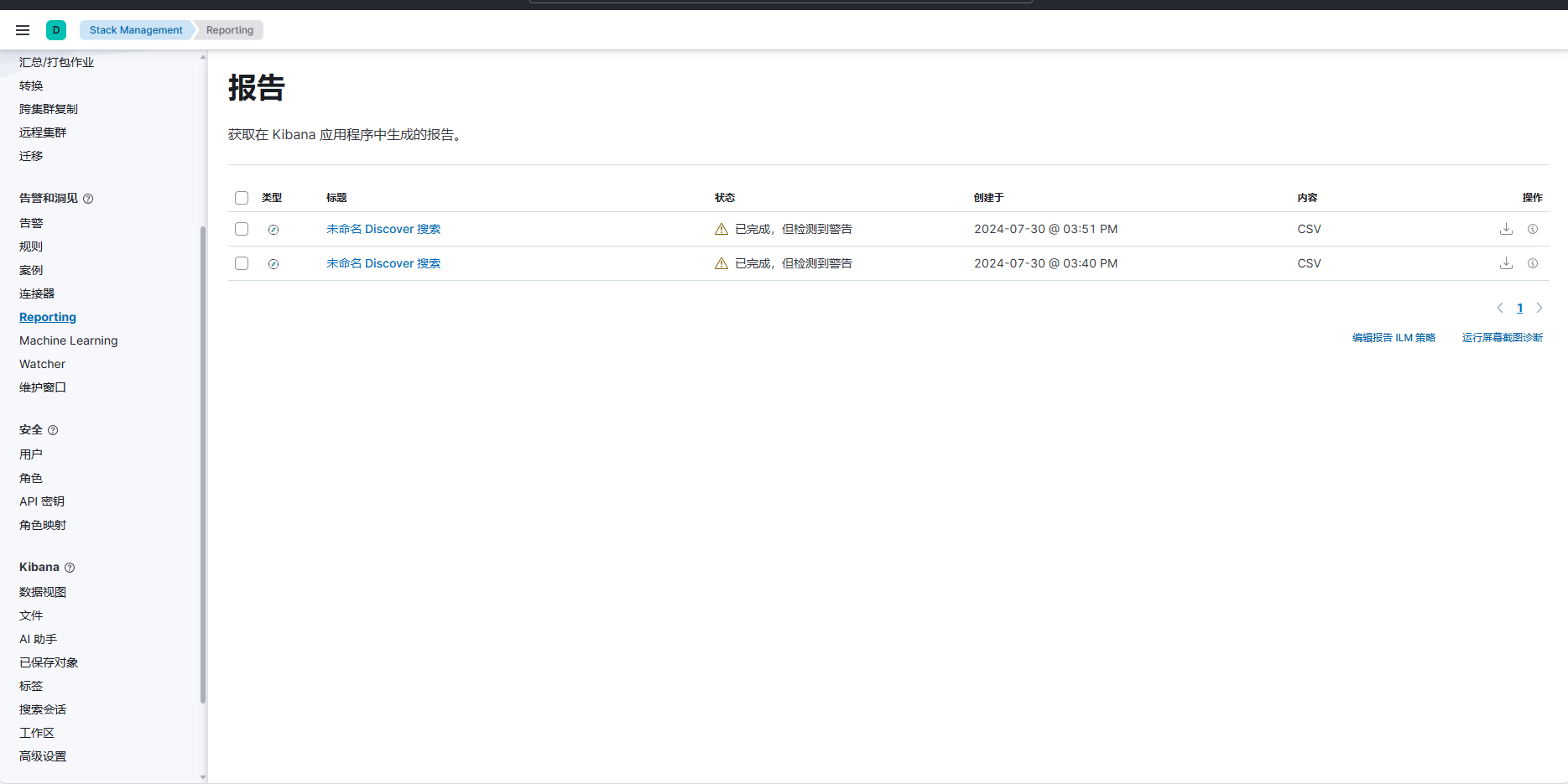
Docker安装Logstash,并结合logback实现ELK日志收集
拉取镜像
docker pull docker.elastic.co/logstash/logstash:8.14.3创建文件夹
mkdir /mnt/data/logstash创建默认文件
先不做目录挂载,run出一个容器
docker run -d --rm -it docker.elastic.co/logstash/logstash:8.14.3将config和pipeline从容器cp到宿主机
…

BEV学习---LSS-1:论文原理及代码串讲
目前在自动驾驶领域,比较火的一类研究方向是基于采集到的环视图像信息,去构建BEV视角下的特征完成自动驾驶感知的相关任务。所以如何准确的完成从相机视角向BEV视角下的转变就变得由为重要。目前感觉比较主流的方法可以大体分为两种:
1、显式…

Linux驱动.之字符设备驱动框架,及手动,自动注册创建/dev下设备节点详解(一)
一、Linux 字符设备驱动框架 Linux一切皆文件,通过VFS虚拟文件系统,把所有外设的细节都隐藏起来,最后都以文件的形态呈现于应用层, 操作设备,就像对文件的打开、关闭、读写、控制。这种方式完美的统一了对用户的接口&a…

WIN/MAC 图像处理软件Adobe Photoshop PS2024软件下载安装
目录
一、软件概述
1.1 基本信息
1.2 主要功能
二、系统要求
2.1 Windows 系统要求
2.2 macOS 系统要求
三、下载
四、使用教程
4.1 基本界面介绍
4.2 常用工具使用
4.3 进阶操作 一、软件概述
1.1 基本信息
Adobe Photoshop(简称PS)是一款…
快手怎么免费的去掉视频水印?分享这三个工具给你
我们经常会遇到想要保存的视频带有水印,这不仅影响美观,也不利于分享。为了解决这个问题,我将分享三个免费去除视频水印的工具,帮助你轻松去除水印,享受无干扰的视频体验。
工具一:奈斯水印助手(小程序…

挑战Infiniband, 爆改Ethernet(3)
Infiniband的特点
Infiniband在HPC集群和AI集群中获得广泛应用是和Infiniband技术的特点密切相关的,今天我们看看Infiniband的技术特点:
1)网络分层模型 这个分层模型并不是Infiniband技术独有的,各种现代网络技术都普遍采用分层模型来设计…

在.NET开发中使用 Excel 的最佳方式之一:MiniExcel
前言
在桌面开发应用中,处理 Excel 文件是一个非常常见的需求。无论是生成报表、导入数据,还是与客户或其他系统进行数据交换,Excel 文件都扮演着重要角色。在 .NET 生态系统中,有许多处理 Excel 文件的工具和库,其中…

Flutter ListView 实现不同样式 item
我们在实际开发中会创建显示不同类型内容的列表。以下是使用 Flutter 创建此类结构的方法: 1. 创建包含不同类型项目的数据源。 2. 将数据源转换为小部件列表。 创建包含不同类型项目的数据源
项目类型
要表示列表中不同类型的项目,请为每种类型的项目…

链表(静态/动态创建,遍历,计数,查找,在节点的前/后方插入新节点,头插法,尾插法)
目录
一、前言
二、链表的静态创建和遍历
三、链表统计节点,查找节点是否存在
四、从指定节点的后方插入新节点
五、从指定节点的前方插入新节点
六、动态创建链表&尾插法
七、头插法
八、删除节点 一、前言
链表本质是一个结构体,结构体里…

19448 算法设计与分析(第五版)习题2-7 集合划分问题
### 思路 1. **递归公式**:根据提示信息,递归公式为: - \( f(n, x) f(n-1, x-1) f(n-1, x) \times x \) - 其中,\( f(n, x) \) 表示将 \( n \) 个元素分成 \( x \) 个非空子集的方案数。 2. **边界条件**: …

【STM32】串口(异步通信部分)
经典的串口接口硬件说实话在现在的电脑上已经很难见到了,而是被USB这种通用的串行接口替代了,哪怕外部设备要以串口连接到电脑,都需要进行各种硬件转换。但不得不说,在工业领域,串口还是一个非常常用的数据传输方式。 …
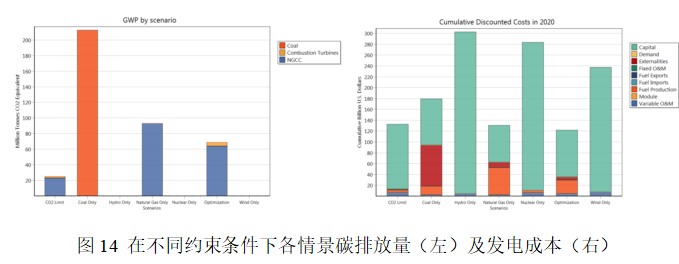
LEAP模型在能源环境发展、碳排放建模预测及分析中实践应用
采用部门分析法建立的LEAP(Long Range Energy Alternatives Planning System/ Low emission analysis platform,长期能源可替代规划模型)是一种自下而上的能源-环境核算工具,由斯德哥尔摩环境研究所和美国波士顿大学联合研发。该模…

后端Web之登录校验(上篇)
目录
1.概述
2.会话技术
3.JWT令牌 1.概述
基础的登录功能实际上就是查询数据库中有没有输入的用户和密码,有就放行,没有就返回错误信息,根据三层架构进行开发: controller层: service层: mapper层&…

Visual C++ 的免费绘图库 EasyX下载安装
EasyX Graphics Library 是针对 Visual C++ 的免费绘图库,支持 VC6.0 ~ VC2022,简单易用,学习成本极低,应用领域广泛。目前已有许多大学将 EasyX 应用在教学当中。
下载地址:EasyX Graphics Library for C++
1、应用 2、文中有很多的C++应用案例 3、编程需要的数学知识 …

19530 2的幂次方表示
### 思路 1. **分解为2的幂次方**:将输入的正整数n分解为若干个2的幂次方之和。 2. **递归表示**:使用递归的方法将每个幂次方表示为2的幂次方形式。 3. **组合结果**:将所有的幂次方表示组合成最终的结果。
### 需要注意的点 - 需要处理幂次…


计算机网络面试真题总结(二)
文章收录在网站:http://hardyfish.top/
文章收录在网站:http://hardyfish.top/
文章收录在网站:http://hardyfish.top/
文章收录在网站:http://hardyfish.top/ 在浏览器中输入 URL 地址到显示主页的过程? URL解析&a…

【记录】基于Windows系统安装rust环境的过程
到官网下载安装包【入门 - Rust 程序设计语言 (rust-lang.org)】
![[Pasted image 20240703142911.png]] 选择1,快速安装 选择编译配置,1为标准 安装完成
验证是否安装完毕
rustc --versioncargo --version验证成功!

【数据结构篇】~二叉树(堆)
【数据结构篇】~二叉树(堆) 二叉树1.树2.树的组成3.二叉树4.堆1.向上调整算法2.向下调整算法3.堆排序 4.topk问题源码 二叉树
1.树
树的概念与结构 树是一种非线性的数据结构,它是由 n(n>0) 个有限结点组成一个…