特斯拉FSD硬件进化
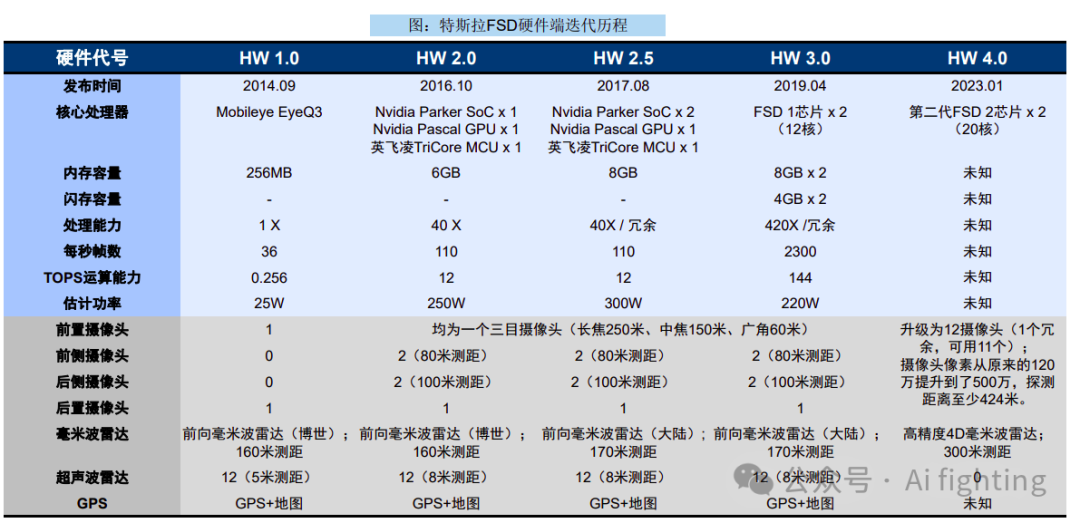
历经十年,特斯拉自动驾驶软硬件系统不断进化。硬件:HW1.0 到 HW4.0,自研比例与配置性能不断提升。
2013 年,马斯克于推特披露特斯拉正在进行辅助驾驶系统 AP(Autopilot System)的研发, 特斯拉自动驾驶之路开启;2014 年 10 月,特斯拉基于与 Mobileye 的深度合作,推出首款自动驾驶软硬件系统 HW1.0 与 AP1.0;2015 年 4 月, 特斯拉组建软件算法小组 Vision,算法开发由第三方供应转向自研;2016 年 7 月,特斯拉宣布结束与 Mobileye 的合作;2016 年 10 月,特斯拉自动驾驶软硬件系统 HW 2.0 与 AP2.0 发布,计算平台基于英伟达 Drive PX 2;2017 年 8 月,特斯拉将 HW 2.0 更新升级为 HW 2.5,底层算力与冗余能力均有提升。2019年3月,特斯拉推出基于自研芯片FSD 的 HW 3.0, 其为特斯拉发布的首个支持完全自动驾驶 FSD(Full Self-Driving)功能的硬件系统;2020 年 10 月,特斯拉向小批量早期测试者推送 FSD Beta V6.0 版本,FSD 功能首上车;2022 年 11 月,FSD 功能全面向北美用户开放。目前特斯拉在研的最新自动驾驶硬件系统已迭代至 HW 4.0,搭载 FSD 二代芯片。
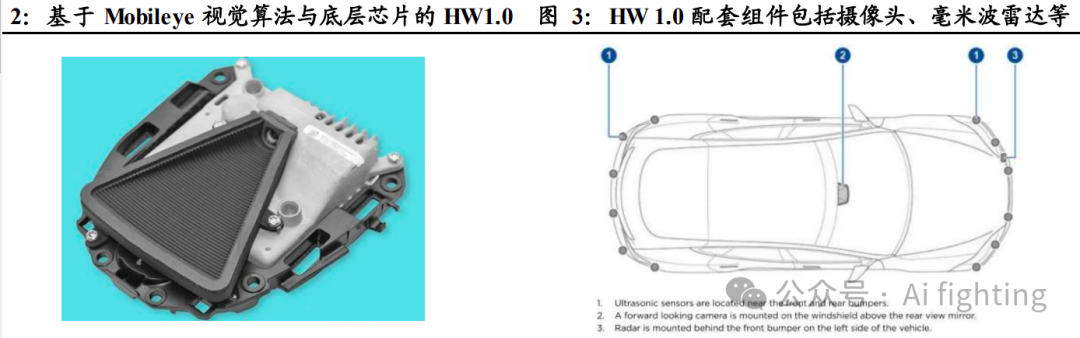
02 HW1.0:依赖于 Mobileye 视觉算法与底层芯片。
特斯拉首代自动驾驶硬件系统 HW1.0 基于 Mobileye 单芯片 EyeQ3 计算平台,算力为 0.256TOPS,系统配套组件包括:1)1 个 Mobileye EQ3 系列前置单目摄像头,布置于后视镜附近;2)1 个博世 77G Hz 毫米波雷达,最远探 测距离 160 米;3)12 个中程超声波传感器,最远探测距离 5 米;4) 高精度电子辅助制动与转向系统。特斯拉 HW1.0 基于与 Mobileye 的深 度合作,其中底层芯片与视觉算法技术均来自于 Mobileye,特斯拉仅负责多传感器融合与应用层软件开发。2014 年-2016 年期间,HW1.0 先后 列装于 Model S 与 Model X 车型。
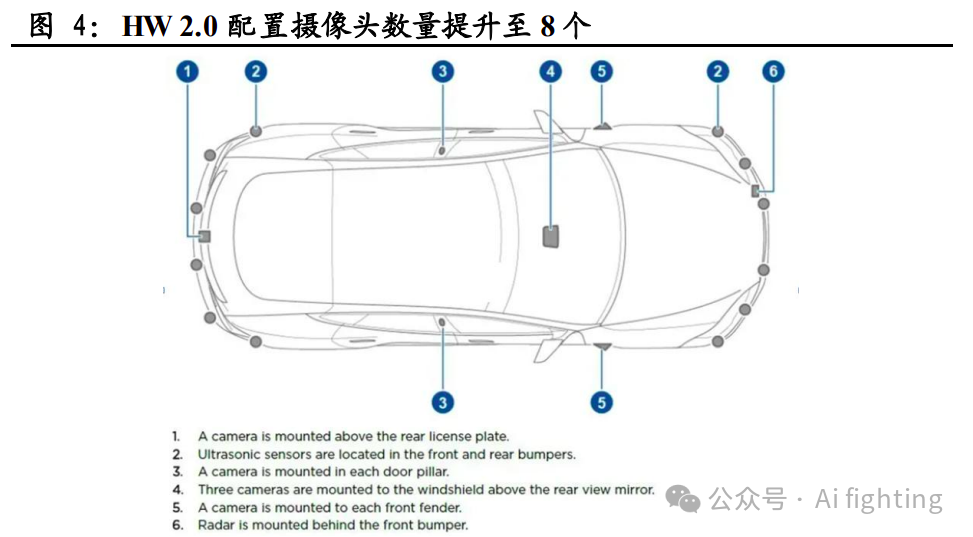
03 HW2.0:基于定制的英伟达计算平台 Drive PX 2
特斯拉第二代自动驾驶硬件系统 HW2.0 基于定制的英伟达 Drive PX 2 计算平台,算力约为 HW1.0 的 40 倍,达到 12TOPS。配套组件方面,HW2.0 搭载 8 个可实现 360 度环视视角的 120 万像素摄像头,包括 1 个前视三目摄像头,2 个后视侧面摄像头,2 个前视侧面摄像头,1 个后视摄像头,供应商为 Aptina。此外,HW2.0 与 HW1.0 一样,同样配置了 1 个博世 77G Hz 毫米波雷达与 12 个超声波传感器(由中程升级为远程)。HW2.0 由特斯拉与英伟达共同开发,其中英伟达提供计算平台与开发工具,特斯拉负责图像识别算法、多传感器融合与应用层软件开发等工作。2016 年 10 月起,特斯拉售出的所有汽车均有配置 HW2.0。
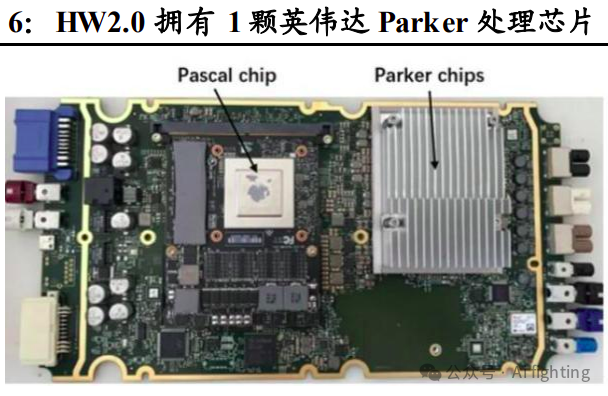
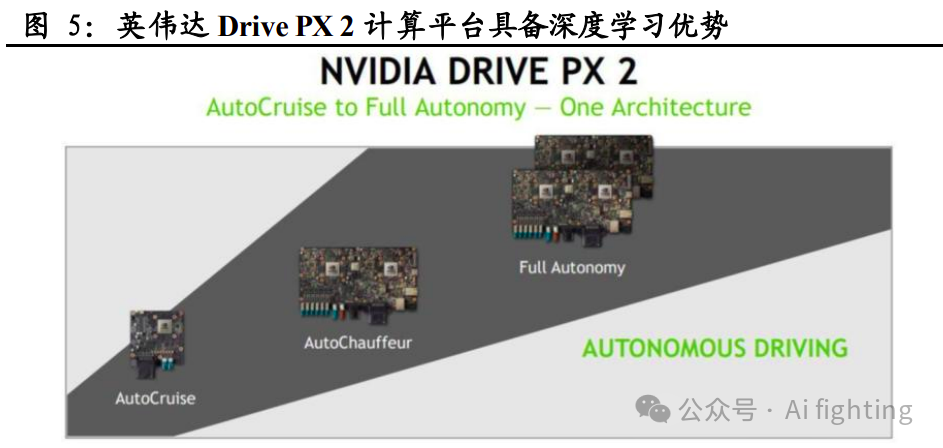
英伟达 Drive PX 2 计算平台
2015 年 1 月英伟达推出(半)自动驾驶汽车的初始开发平台 Drive PX;2016 年 1 月英伟达在 CES 上推出了增强版 Drive PX 2,该平台基于通用的 GPU 架构,可实现卷积神经网络 (CNN)的应用。
为实现自动驾驶性能的进一步提升,特斯拉开始自研 FSD 芯片
尽管英伟达 Drive PX 2 计算平台在当时的自动驾驶领域已处于领先地位,但特斯拉仍认为其基于通用 GPU 架构的设计并不能最大限度满足自动驾 驶功能需求,系统运行速度还可以通过设计优化进行提升。因此,2016 年特斯拉在发布 HW2.0 的同时开始了 FSD 自研芯片的开发,并陆续从 AMD 引入大量芯片人才。
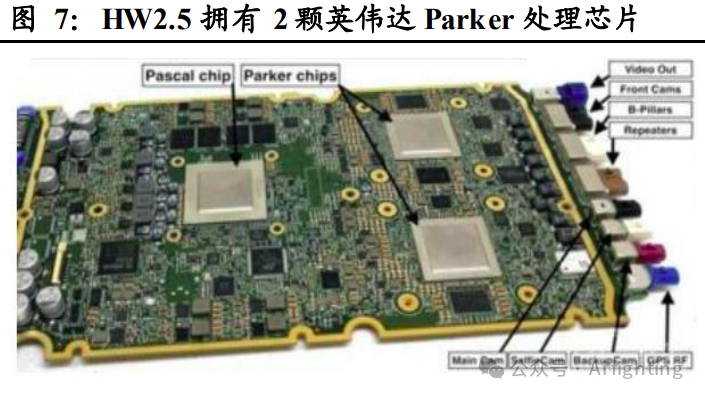
HW2.5:冗余性与可靠性获得提升
2017 年 7 月特斯拉对 HW2.0 进行 更新,业内称更新版本为 HW2.5。该次更新主要对系统的冗余性与可靠性进行了提升,并新增行车记录仪与哨兵模式功能。具体组件变动为:1)前置/侧置摄像头从 RCCC 滤镜换成了 RCCB 滤镜,摄像头的色彩分辨能力提升。2)毫米波雷达由博世 77G Hz 中距离雷达替换为大陆长距离雷达 ARS410。3)计算平台增加了 1 个 Parker 处理芯片。4)采用了双线缆通信使线控系统冗余性增强。
04 HW3.0:首次采用自研芯片,支持 FSD 功能实现
特斯拉 HW3.0 又称 FSD Computer,其抛弃了 HW2.5 的英伟达/英飞凌(SOC+MCU)底层芯片组合,转为装载自研 FSD 芯片。与 HW2.5 相比,HW3.0 在性能和成本上都有较大提升,可支持 FSD 功能。根据特斯拉数据,FSD 算力达到 144TOPS,每秒可处理图片2300 张,而 HW 2.5 每秒处理能力仅为 110 张,性能提升21倍;FSD 的成本相对于 HW 2.5 下降了 20%。配套组件方面,HW3.0 与 HW2.5 完全一致,仍采用 8 个可环视摄像头+1 个大陆毫米波雷达+12 个超声波传感器方案。结构布局方面,HW3.0 将驾驶辅助硬件和娱乐系统硬件集成在同一控制器中,但电路设计未实现高度集成,两项功能分别基于独立的电路板。在 HW3.0 研发过程中,特斯拉负责了全套芯片设计、图像识别算法、多传感器融合与应用层软件开发等多项工作,自研比例再次提升。
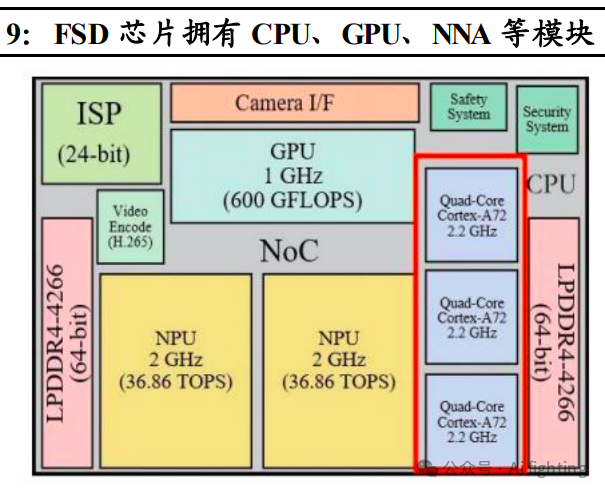
FSD 芯片:
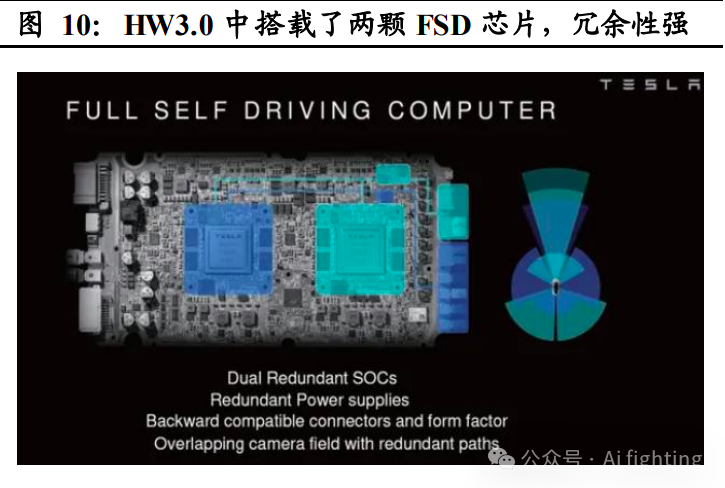
FSD 芯片采用三星 14nm FinFET CMOS 工艺,在 260mm2 的硅片上集成了约 60 亿个晶体管,组成 2.5 亿个逻辑门电路,芯片封装 尺寸 37.5×37.5mm,底座采用 FCBGA 设计,整体设计符合 AEC-Q100 汽车质量标准。FSD 芯片主要由 CPU、GPU 和 NNA(神经网络加速单 元)三个计算模块,以及各种接口,片上网络等组成,其中 CPU 由三组四核 ARM Cortex-A72 架构组成,主频 2.2GHz,主要用于通用的计算和任务,GPU 支持 16/32 位浮点运算,算力为 600GFlops,主要用于轻量级的后处理任务,NNA 包括 2 个 NPU(神经网络处理器),每个 NPU 都封装了 32MB 的 SRAM。HW3.0 中搭载了两颗 FSD 芯片,在行驶过程中,两颗芯片将分别对传感器收集到的数据进行独立处理,并进行结果平衡、仲裁和验证,自动驾驶功能的可靠性得到提升。
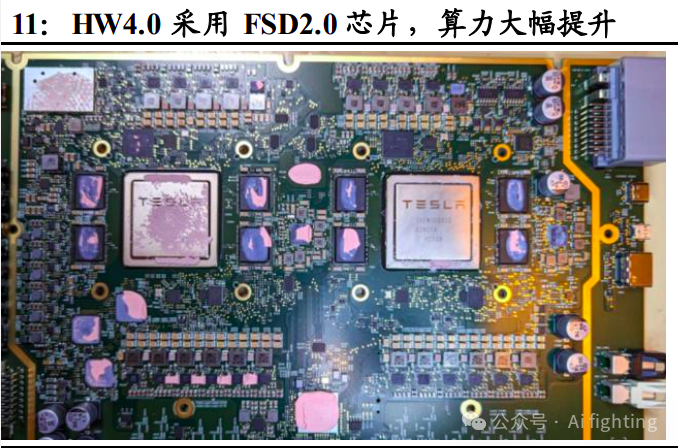
05 HW4.0
配置将有较大升级。根据外媒拆解报告,HW4.0 采用 FSD 二代芯片,预计算力高于 300TOPS,内部 CPU 的内核从 12 个增加到 20 个,最大频率为 2.35GHz,低功耗频率为 1.37GHz;TRIP 内核数量从 2 个增加到 3 个,最大频率 2.2GHz。配套组件方面,HW4.0 的 主板摄像头接口为 12 个,其中 1 个为备用,即车载摄像头或由原先的 8 个提升至 11 个,前置摄像头像素也有望提升至 500 万。此外,HW4.0 主板增加了 4D 毫米波雷达接口(代号 Phoenix),但未配置超声波雷达。

最后别忘了,帮忙点“在看”。
您的点赞,在看,是我创作的动力;
AiFighing是全网第一且唯一分享自动驾驶实战,以代码、项目的形式讲解自动驾驶感知方向的关键技术,从算法训练到模型部署。
关注我的公众号auto_driver_ai(Ai fighting), 第一时间获取更新内容。














![[论文笔记]Improving Retrieval Augmented Language Model with Self-Reasoning](https://img-blog.csdnimg.cn/img_convert/10f50a19d0c5b8ebb7e737cd9462c018.png)
