ESP32CAM人工智能教学19
Udp socket服务器

本课的工作模式,正好是第十四课工作模式的相反:第十四课中,ESP32Cam是客户端,运行在PC中的Python程序是服务器,就收到了摄像头数据后,调用openCV组件显示图像。而本课的ESP32Cam是服务器,Python是客户端,正好掉了个个,目的就是想把ESP32Cam作为服务器推向公网,这样就可以异地访问了。
Socket是一种点到点直连的传输模式,支持全双工的工作模式。如果我们把ESP32Cam设计成Udp Socket的服务器模式,这样就可以推送到网络中,我们的手机APP或电脑,就可以作为客户端,连接ESP32Cam,一边获取图片,一边发送控制的数据,多种操作同时进行。
Socket传输与TCP传输的最大区别是,TCP是半双工工作模式,主动权完全掌控在客户端(浏览器)中,而Web服务器仅仅是工作在被动的模式:用户通过浏览器发送数据请求,服务器作出响应,返回数据给浏览器。这就是半双工的模式,服务器是无法主动地向客户端发送数据的。
- Socket CS模式测试
Socket虽然是点到点之间的直连传输,但是还是需要有一个设备作为服务器server端,需要另一个设备作为客户端client,这种模式就是通常说是的CS工作模式。
在这里,我们把ESP32Cam作为服务器端,当ESP32Cam通电启动后,连接WiFi,获得192.168.1.180的地址,并开启了8080端口的服务。
我们在电脑PC中打开Python程序,粘贴代码并运行。程序作为客户端,会主动连接192.168.1.180:8080服务器。

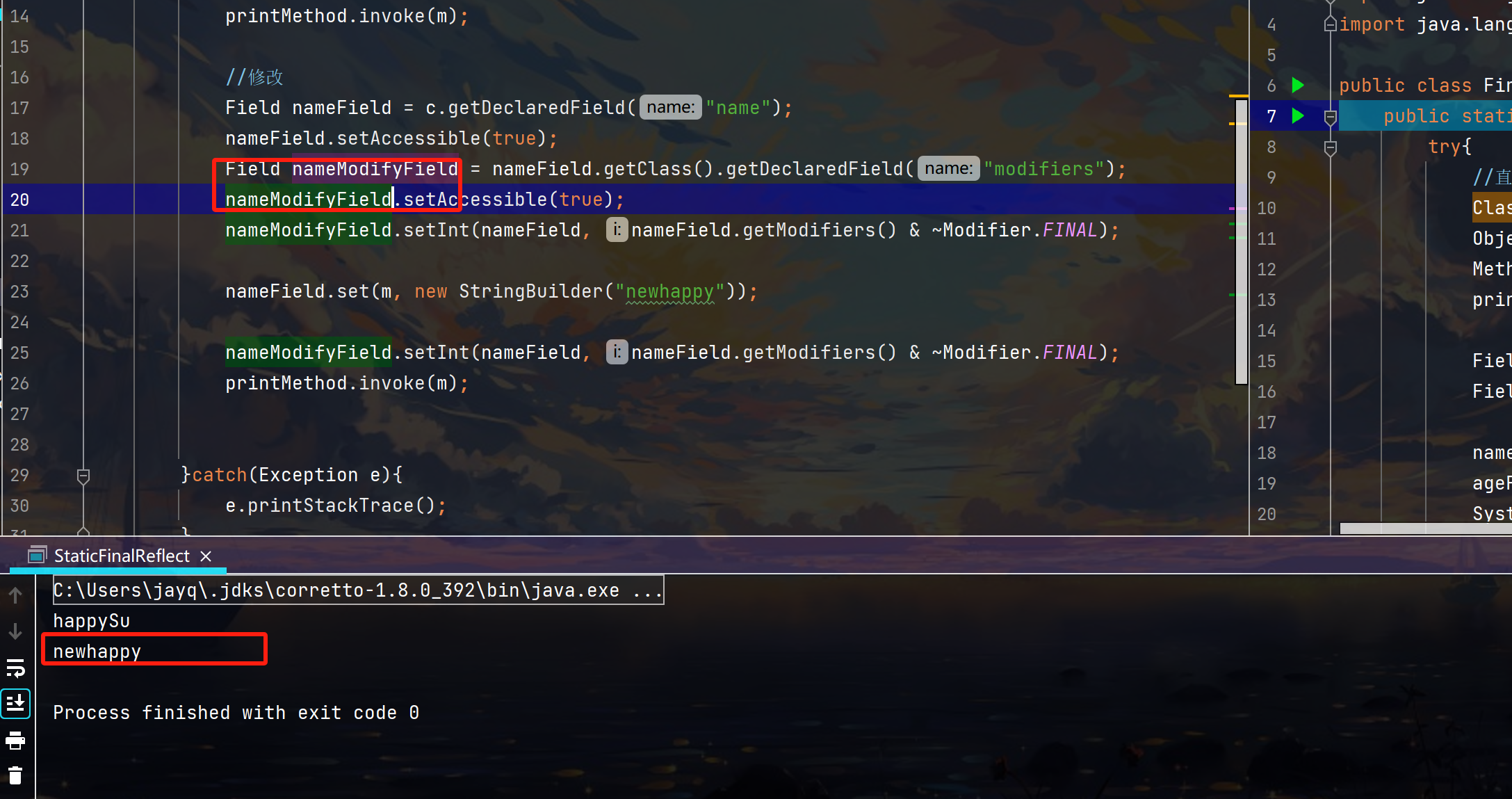
我们先启动ESP32Cam,串口显示服务器开启,然后运行Python程序。当服务器端的ESP32Cam检测到客户端的Python连接成功的时候,会主动地向客户端发送信息(每隔3秒发送一条信息);客户端Python在接收到信息后,会把这条信息原路返回给服务器。两个程序一先一后打印出消息,效果如上图所示。
Arduino IDE程序,写入ESP32Cam
ESP32Cam通电后连接WiFi,开启192.168.1.180:8080服务器
每隔3秒发送一条消息给客户端
#include <WiFi.h>
#include <WiFiClient.h>
#include <WiFiServer.h>
const char* ssid = "ChinaNet-xxVP";
const char* password = "123456789";
#define CLIENTS_MAX_NUMS 1
WiFiServer server(8080);
WiFiClient serverClients[CLIENTS_MAX_NUMS];
String sendstr = "";
int val = 0;
void setup() {
Serial.begin(115200);//开启串口
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED) {delay(1000);}
//while (!WiFi.softAP(u8&#