本文摘要
本文详细介绍了基于线性二次型调节器(LQR)算法的机器人轨迹跟踪控制方法。首先,文章通过建立基于运动学模型的离散状态方程,来描述机器人的当前状态与目标状态之间的关系,并利用此模型进行状态误差的计算。接着,通过设定状态量和控制量的权重矩阵(Q和R),使用LQR算法求解控制输入u,旨在最小化状态偏差和控制成本,以实现精确的轨迹跟踪。此外,文章还分析了LQR算法在ros_motion_planning运动规划库中的实现,通过源代码详解了误差量化、状态方程动态矩阵的建立、反馈控制增益的计算以及最终控制向量的生成等关键技术步骤。
一、根据运动学模型建立离散的状态方程
本部分内容已经在之前的文章中详细介绍过了,链接如下:
车辆/单车运动学建模、线性化、离散化过程详细推导【点击可跳转】
设机器人当前的位姿为 ( x c , y c , φ c ) (x_c, y_c, φ_c) (xc,yc,φc), 其中 ( x c , y c , ) (x_c, y_c,) (xc,yc,) 为其当前位置坐标, φ c φ_c φc为其当前姿态角,当前前轮的转向角为 δ c δ_c δc,当前的后轮车速为 v c v_c vc,前轮车速为 v f v_f vf,前后轮距为 l l l,默认采用后轮驱动模式,即可控的是后轮车速 v c v_c vc,如下图所示:
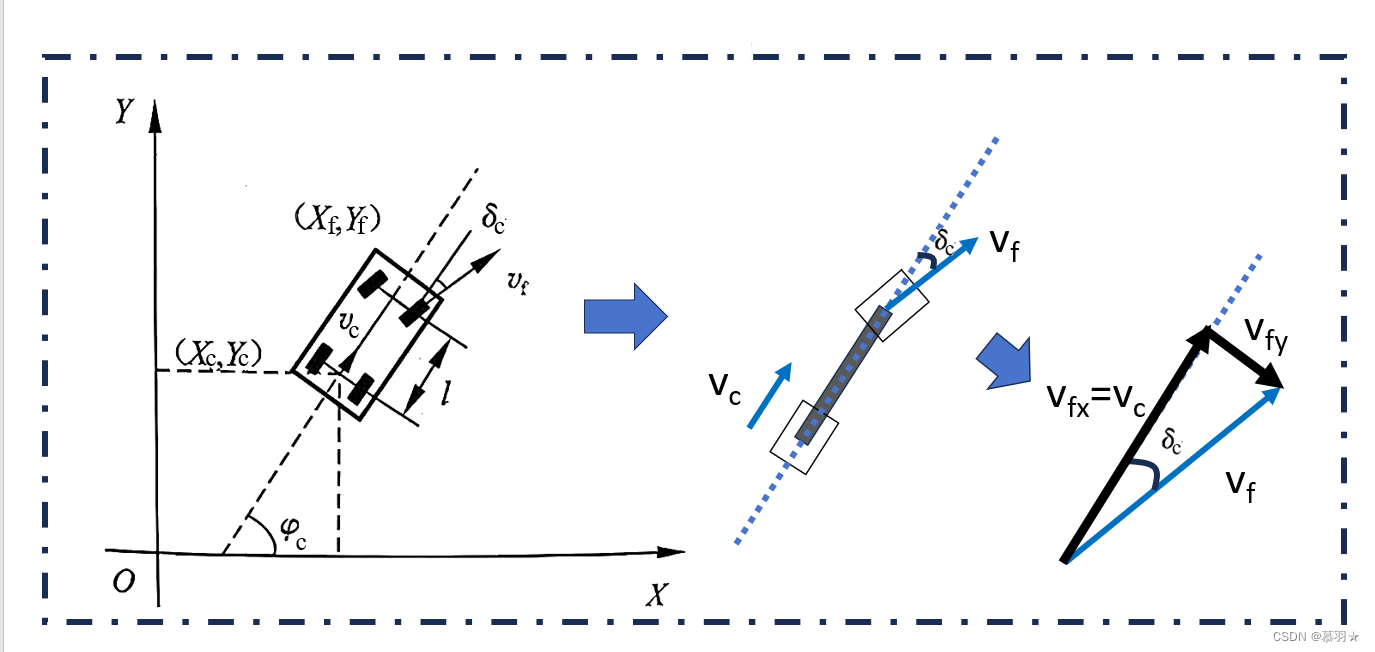
这里我们直接放一下上文的结论(想了解过程中,可以去看一下上面链接中的文章),将状态量和输入量取为当前量与期望值的差值,即
X = [ x c − x r y c − y r φ c − φ r ] , u = [ v c − v r δ c − δ r ] {{X}}=\begin{bmatrix}{x_{c}}-x_{r}\\ {y_c}-{y}_{r}\\ {\varphi_c}-{\varphi}_{r}\end{bmatrix},\mathbf{{u}}=\begin{bmatrix}v_{c}-v_{r}\\ \delta_{c}-\delta_{r}\end{bmatrix} X= xc−xryc−yrφc−φr ,u=[vc−vrδc−δr]
此时:
X ( k + 1 ) = [ 1 0 − T v r sin ψ r 0 1 T v r cos ψ r 0 0 1 ] X ( k ) + [ T cos ψ r 0 T sin ψ r 0 T tan δ r l T v r l cos 2 δ r ] u ( k ) = A X ( k ) + B u ( k ) \begin{aligned}\mathbf{X}(\mathrm{k}+1) & \left.=\left[\begin{array}{ccc}1 & 0 & -\mathrm{Tv}_{\mathrm{r}}\sin\psi_{\mathrm{r}}\\ 0 & 1 & \mathrm{Tv}_{\mathrm{r}}\cos\psi_{\mathrm{r}}\\ 0 & 0 & 1\end{array}\right.\right]\mathbf{X}(\mathrm{k})+\left[\begin{array}{ccc}\mathrm{T}\cos\psi_{\mathrm{r}} & 0\\ \mathrm{T}\sin\psi_{\mathrm{r}} & 0\\ \frac{\mathrm{T}\tan\delta_{\mathrm{r}}}{l} & \frac{T\mathrm{v}_{\mathrm{r}}}{l\cos^2\delta_{\mathrm{r}}}\end{array}\right]\mathbf{u}(\mathrm{k})\\ & \mathrm{=AX(k)+Bu(k)}\end{aligned} X(k+1)= 100010−TvrsinψrTvrcosψr1 X(k)+ TcosψrTsinψrlTtanδr00lcos2δrTvr u(k)=AX(k)+Bu(k)
有了上面的离散化线性运动学模型的状态空间方程,就可以基于此来使用LQR、MPC等控制算法进行轨迹跟踪控制或完成其他控制任务了
二、使用LQR求解控制输入u
有了第一部分得到的离散的状态空间方程,轨迹跟踪问题就是如何选取合适的输入量u来使得状态量X趋于0,即使得当前状态与期望状态趋于相等(即差值为0),在LQR中目标函数被设定为下式
J = ∑ k = 1 n ( X T Q X + u T R u ) J = \sum_{k=1}^n (X^T QX + u^T Ru) J=k=1∑n(XTQX+uTRu)
其中,Q为半正定的状态加权矩阵, R为正定的控制加权矩阵,且两者通常取为对角阵;这两个权重矩阵也就是LQR算法需要调节的参数,如果增大Q矩阵中某个元素值,意味着我们期望状态量X中对应的状态能够快速趋近于零,加强跟踪效果,如果增大R矩阵中某个元素值,意味着我们期望输入量u中对应的输入能够快速趋近于零,减少能量损耗。
【补充说明:正定矩阵】给定一个大小为n × n 的实对称矩阵A ,若对于任意长度为n 的非零向量x ,有 x T A x > 0 x^TA x > 0 xTAx>0,则为矩阵A为正定矩阵,有 x T A x > = 0 x^TA x >= 0 xTAx>=0,则为矩阵A为半正定矩阵。
因为,上述LQR目标函数的表达式本质上是一个典型的多目标优化最优控制问题,某一项的权重越大,那么在优化时,减少该项的值,对目标函数值的减少就越明显,自然会优先减少该项的值,从而达到使得该项更快的趋于0。在轨迹跟踪中,前一项优化目标表示跟踪过程路径偏差的累积大小,第二项优化目标表示跟踪过程控制能量的损耗,这样就将轨迹跟踪控制问题转化为一个最优控制问题,两个权重矩阵Q和R就用来平衡这两项的权重。
对于上述目标函数的优化求解,使用线性二次型调节器 ( Linear-Quadratic Regulator)进行求解,解出的最优控制规律u是关于状态变量X的线性函数,如下所示:
u = − ( R + B T P B ) − 1 B T P A x = K x u = - (R + B^T P B)^{-1} B^T P A x = Kx u=−(R+BTPB)−1BTPAx=Kx
其中,
P = A T P A − A T P B ( R + B T P B ) − 1 B T P A + Q P = A^T P A - A^T P B (R + B^T P B)^{-1} B^T P A + Q P=ATPA−ATPB(R+BTPB)−1BTPA+Q
可以发现解出的u的表达式中仅有P是未知的,P可通过上式进行求解,然而可以发现,上式直接求不好求,所以,我们可以选择求其近似解,
【补充说明:黎卡提方程】
形如 y ′ = P ( x ) y 2 + Q ( x ) y + R ( x ) \mathrm{y^{\prime}=P(x)y^2+Q(x)y+R(x)} y′=P(x)y2+Q(x)y+R(x)的非线性微分方程称为黎卡提方程。
针对黎卡提方程,可以采用循环迭代的思想求解P,具体方法如下:
①将等式右边的P初始化为P_old=Q;
② 然后用P_old取代等式右边的P来计算等式右边的值,计算结果为P_new
③ 比较P_old和P_new,若两者的差值小于预设值, 则认为等式两边相等,我们已经得到了P的近似解,结束循环;否则再令P_old=P_new,继续循环②~③步,直至得到P的近似解或者达到最大迭代次数。
所以在求解控制输入u时,先通过上面的循环迭代,求出近似的P,然后代入u的表达式,即可得到当前的控制输入u,这里需要注意的是,我们定义的输入u,实际上是当前值与期望值的差值,需要再加上期望值 u r u_r ur才是当前的控制输出指令给机器人执行,进行轨迹跟踪控制。


三、ros_motion_planning运动规划库中实现LQR算法的函数源码解析
1、源码如下:
/**
* @brief Execute LQR control process
* @param s current state
* @param s_d desired state
* @param u_r refered control
* @return u control vector
*/
Eigen::Vector2d LQRPlanner::_lqrControl(Eigen::Vector3d s, Eigen::Vector3d s_d, Eigen::Vector2d u_r)
{
Eigen::Vector2d u;
Eigen::Vector3d e(s - s_d);
e[2] = regularizeAngle(e[2]);
// state equation on error
Eigen::Matrix3d A = Eigen::Matrix3d::Identity();
A(0, 2) = -u_r[0] * sin(s_d[2]) * d_t_;
A(1, 2) = u_r[0] * cos(s_d[2]) * d_t_;
Eigen::MatrixXd B = Eigen::MatrixXd::Zero(3, 2);
B(0, 0) = cos(s_d[2]) * d_t_;
B(1, 0) = sin(s_d[2]) * d_t_;
B(2, 1) = d_t_;
// discrete iteration Ricatti equation
Eigen::Matrix3d P, P_;
P = Q_;
for (int i = 0; i < max_iter_; ++i)
{
Eigen::Matrix2d temp = R_ + B.transpose() * P * B;
P_ = Q_ + A.transpose() * P * A - A.transpose() * P * B * temp.inverse() * B.transpose() * P * A;
if ((P - P_).array().abs().maxCoeff() < eps_iter_)
break;
P = P_;
}
// feedback
Eigen::MatrixXd K = -(R_ + B.transpose() * P_ * B).inverse() * B.transpose() * P_ * A;
u = u_r + K * e;
return u;
}
2、主要作用:
函数_lqrControl执行LQR(线性二次调节器)控制过程,其主要作用是根据当前状态、期望状态和参考控制输入来计算控制向量。这个控制向量旨在最小化路径追踪误差和控制输入的成本,是实现精确路径跟踪的关键。下面将逐段详细介绍这个函数的代码和其功能。
3、结合第二部分的流程进行详细介绍
Eigen::Vector2d u;
Eigen::Vector3d e(s - s_d);
e[2] = regularizeAngle(e[2]);
这段代码首先定义控制向量u,然后计算当前状态s和期望状态s_d之间的误差向量e。为了确保角度误差在合理的范围内(-π 到 π),使用regularizeAngle函数处理e[2],即角度误差部分。
注:这里的s和s_d分别就是本文第一和第二部分中介绍中当前状态 X c X_c Xc和期望状态 X r X_r Xr,这里的e就是当前状态与期望状态的差值,也就本文介绍的 X X X
// state equation on error
Eigen::Matrix3d A = Eigen::Matrix3d::Identity();
A(0, 2) = -u_r[0] * sin(s_d[2]) * d_t_;
A(1, 2) = u_r[0] * cos(s_d[2]) * d_t_;
Eigen::MatrixXd B = Eigen::MatrixXd::Zero(3, 2);
B(0, 0) = cos(s_d[2]) * d_t_;
B(1, 0) = sin(s_d[2]) * d_t_;
B(2, 1) = d_t_;
这一部分定义了基于误差的状态方程的动态矩阵A和控制矩阵B。这些矩阵描述了当前状态误差如何随时间演变,以及控制输入如何影响状态误差的演变。A矩阵初始化为单位矩阵,然后通过调整以包含对状态误差动态的描述。B矩阵初始化为零矩阵,然后根据期望状态和控制间隔时间d_t_进行填充。
注: 这里的A矩阵,跟本文前面给出的A矩阵完全相同,B矩阵的前两行相同,但第三行不同,是因为本文给出的矩阵A和B是按照单车模型进行建模得到的,而该程序是对差速模型进行建模得到的,所以这里不一样
// discrete iteration Ricatti equation
Eigen::Matrix3d P, P_;
P = Q_;
for (int i = 0; i < max_iter_; ++i)
{
Eigen::Matrix2d temp = R_ + B.transpose() * P * B;
P_ = Q_ + A.transpose() * P * A - A.transpose() * P * B * temp.inverse() * B.transpose() * P * A;
if ((P - P_).array().abs().maxCoeff() < eps_iter_)
break;
P = P_;
}
这一段代码通过使用前文介绍的离散迭代黎卡提(Riccati)方程来计算反馈增益矩阵K的中间变量P。P是一个对称正定矩阵,用于评估状态误差的二次成本。这个过程反复迭代,直到P的变化小于设定的阈值eps_iter_或达到最大迭代次数max_iter_。
注:该过程与前文介绍完全吻合
// feedback
Eigen::MatrixXd K = -(R_ + B.transpose() * P_ * B).inverse() * B.transpose() * P_ * A;
u = u_r + K * e;
最后,根据计算出的P来,计算反馈增益矩阵K,并使用它来调整参考控制u_r,以最小化误差。这个反馈机制是LQR控制的核心,它确保了即使在存在状态误差的情况下,控制系统也能产生接近最优的控制动作。
注:该过程与前文介绍完全吻合
综上所述,_lqrControl函数通过计算基于当前和期望状态的控制动作,实现了对机器人的精确控制,以跟踪给定的路径。这一过程包括误差的量化、系统动态的建模、反馈控制增益的计算,以及最终控制向量的生成。


参考资料:
1、基础算法 - LQR - 离散时间有限边界
2、路径规划与轨迹跟踪系列算法学习_第12讲_线性二次型调节器(LQR)法
3、【自动驾驶】LQR控制实现轨迹跟踪 | python实现 | c++实现
4、ai-winter/ros_motion_planning