CarLLaVA: Vision language models for camera-only closed-loop driving
用于仅摄像头闭环驾驶的视觉语言模型
Abstract
In this technical report, we present CarLLaVA, a Vision Language Model (VLM) for autonomous driving, developed for the CARLA Autonomous Driv…
目录 Positivity Assumption
An Identification Example with Data
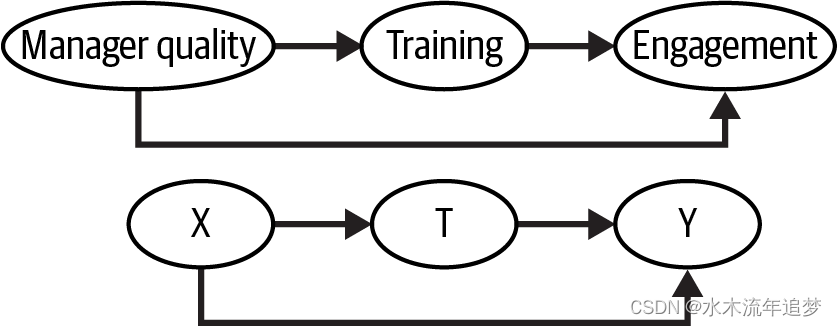
Confounding Bias Positivity Assumption
调整公式同样强调了正则性(positivity)的重要性。因为你正在对治疗和结果之间的差异在X的条件下求平均,你必须确保对于所有X的…