力反馈遥控机器人有哪些好处?
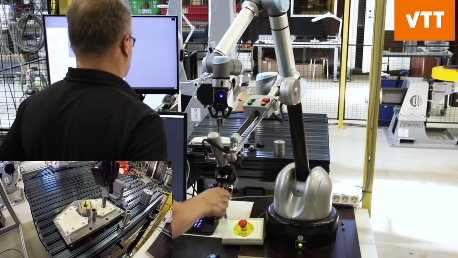
遥控机器人是机器人技术领域的一个领域,主要涉及远距离控制半自主机器人。它被定义为遥操作和远程呈现的结合。第一部分,遥控操作,使操作员能够远程控制机器人。第二部分,远程呈现,使操作员能够“感知”机器人与环境的交互。借助力反馈,操作员可以了解远程站点的作用力,尤其是机器人的惯性和摩擦力、工具的重量、机器人的关节限制、与障碍物的碰撞以及机器人对其他物体的作用。力反馈遥控机器人只有通过力反馈操纵器才有可能实现。

感受机器人的惯性有什么用途
无论是工业机器人还是协作机器人,它们都有一个共同的特点,那就是它们具有一定的惯性。通过力反馈操纵器控制机器人,您将能够感受到惯性,这种惯性被适当地缩小,以便人们可以承受。在旋转一个关节时,您可能会感觉到摩擦力和阻力,这是由于驱动过程中的不同机制所致。而在控制整个机器人时,您会感受到整个系统(包括工具和有效载荷)的综合惯性。
因此,如果您使用力反馈操纵器快速移动,您会感觉到来自机器人的阻力,因为它无法像您尝试的那样快速移动。当您尝试突然停止移动时,可能会发生同样的体验:机器人会尝试继续其轨迹一小会儿,但会因为其重量和减速并停止其运动所需的时间(其惯性)而受到影响——这一时间比用户单独停止力反馈操纵器(即非耦合)运动所需的时间要长。
操作员感受机器人的动态非常重要,否则他/她会很快失去控制,系统性地超越预定的航点。借助力反馈,操作员可以充分利用他的/她的手动技能,并将他的/她的全部灵活性应用于任务。
感受与环境的接触!
力反馈就是为了让用户有更好的意识。在进行远程控制时,获得尽可能多的反馈非常重要:视觉系统可以让你看到东西,麦克风可以帮助你听到远处环境的噪音,更重要的是,力反馈操纵器可以让你感受到你触摸的东西和时间。
你的工作环境可能很脆弱:你不会希望一个 200 公斤有效载荷的机器人损坏某些东西,因为你的操纵杆没有给你已经接触到天花板的信息。同样,你的机器人或末端执行器可能非常昂贵或非常脆弱,你可能不想因为不小心撞到墙壁而损坏它,并且由于缺乏物理反馈而继续向同一方向推。
这就是力反馈的目标:为用户提供力的信息,以便结合其他感官,他/她能够更好地了解远处的环境,而不容易犯错误。
制定一个周密的计划以应对意外情况!
您已经花了数周甚至数月的时间来开发自动化程序。它完全可以为您的流程服务,帮助您的项目在您定义的环境中运行。但不幸的是,出现了一些问题:工作场所在最后一刻发生了变化,您必须重写部分程序,某个元素与描述不符,无法按计划执行,甚至更糟:您编写的程序失败了,根本无法运行。
无论是核电站退役,使用预编程的轨迹执行切割、去毛刺和其他密集任务,还是化学工业中敏感材料的拾取和放置,您都不能浪费时间,让任务半途而废。通过为自己提供力反馈遥控机器人系统,您将获得一个不会因一行代码而失望的解决方案。您可以完成正在执行的任务,这样您就不会减慢项目进度或不得不关闭生产线,从而给自己足够的时间来解决主要问题 - 或者使用遥控机器人系统作为主要解决方案。