原文链接:从CNN到Transformer:基于PyTorch的遥感影像、无人机影像的地物分类、目标检测、语义分割和点云分类教程![]() https://mp.weixin.qq.com/s?__biz=MzUzNTczMDMxMg==&mid=2247610610&idx=5&sn=f973c3e430c89d6123ca8f4892086c55&chksm=fa827115cdf5f8036ef8111c6f06cf592a8c058757e971832a530620fad669b23b4b66080f37&token=200634784&lang=zh_CN#rd
https://mp.weixin.qq.com/s?__biz=MzUzNTczMDMxMg==&mid=2247610610&idx=5&sn=f973c3e430c89d6123ca8f4892086c55&chksm=fa827115cdf5f8036ef8111c6f06cf592a8c058757e971832a530620fad669b23b4b66080f37&token=200634784&lang=zh_CN#rd
一:深度卷积网络
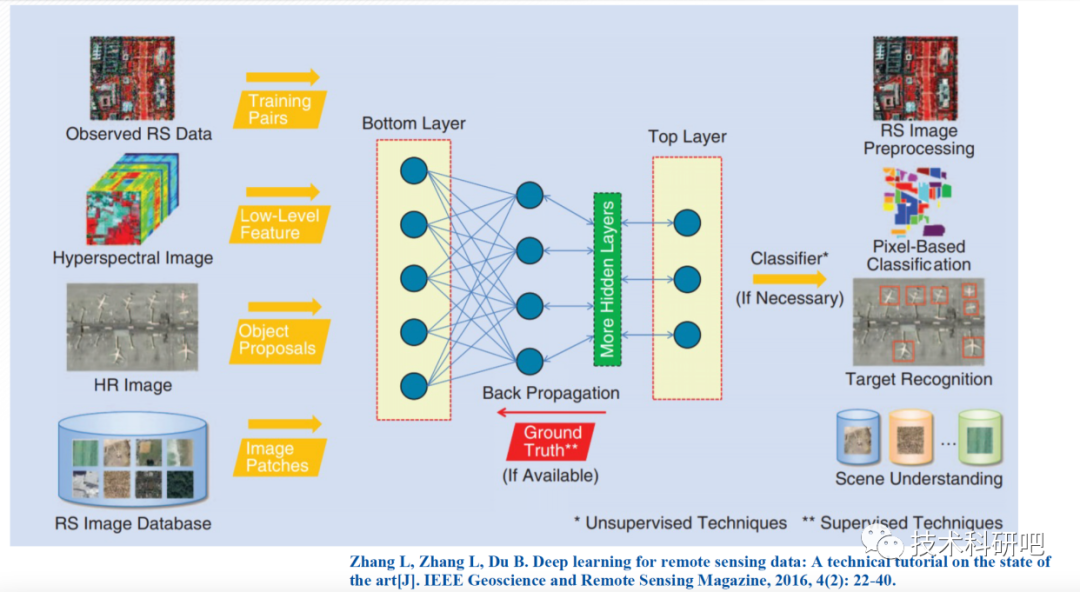
1.深度学习在遥感图像识别中的范式和问题
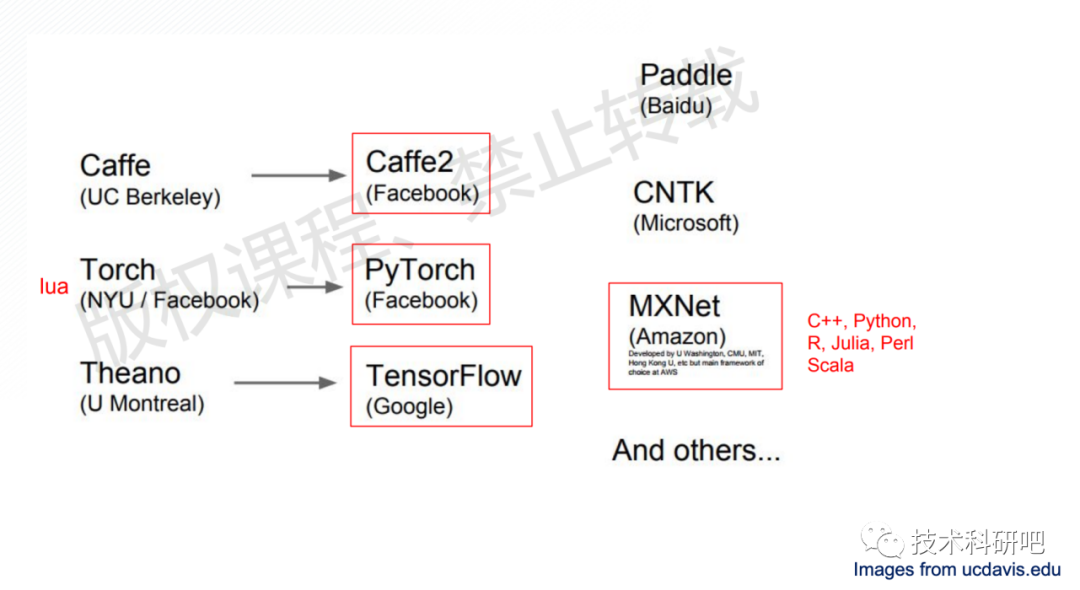
2.深度学习的历史
3.机器学习,深度学习等任务的基本处理流程
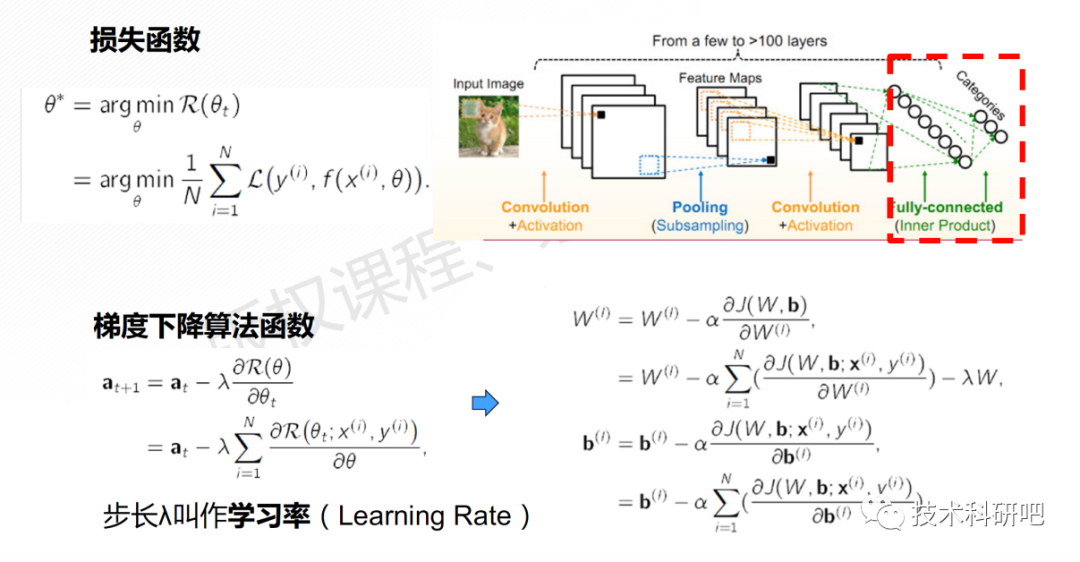
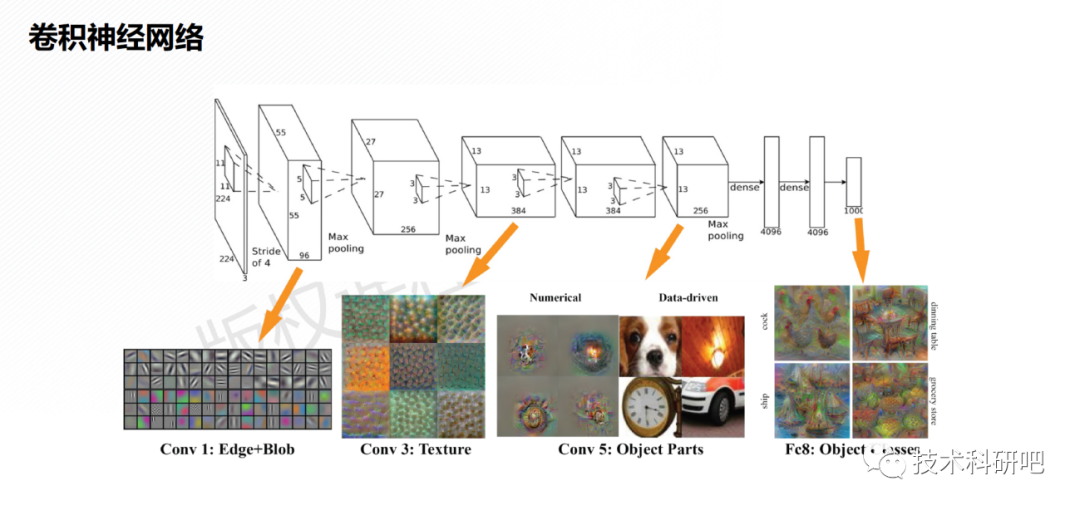
4.卷积神经网络的基本原理
5.卷积运算的原理
6.池化操作,全连接层,以及分类器的作用
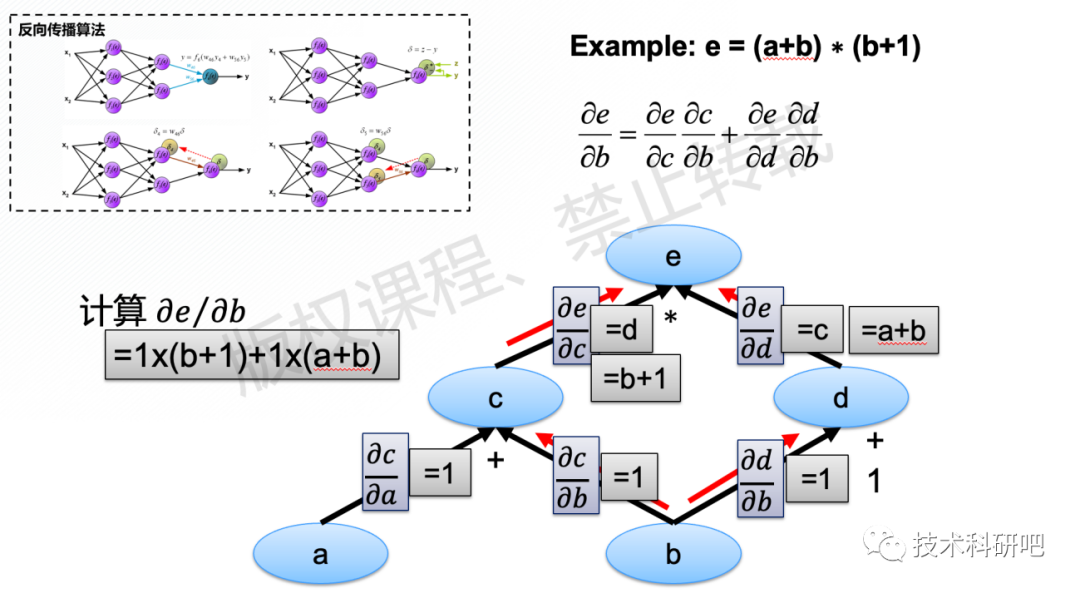
7.BP反向传播算法的理解
8.CNN模型代码
9.特征图,卷积核可视化分析
二:PyTorch应用(遥感图像场景分类)
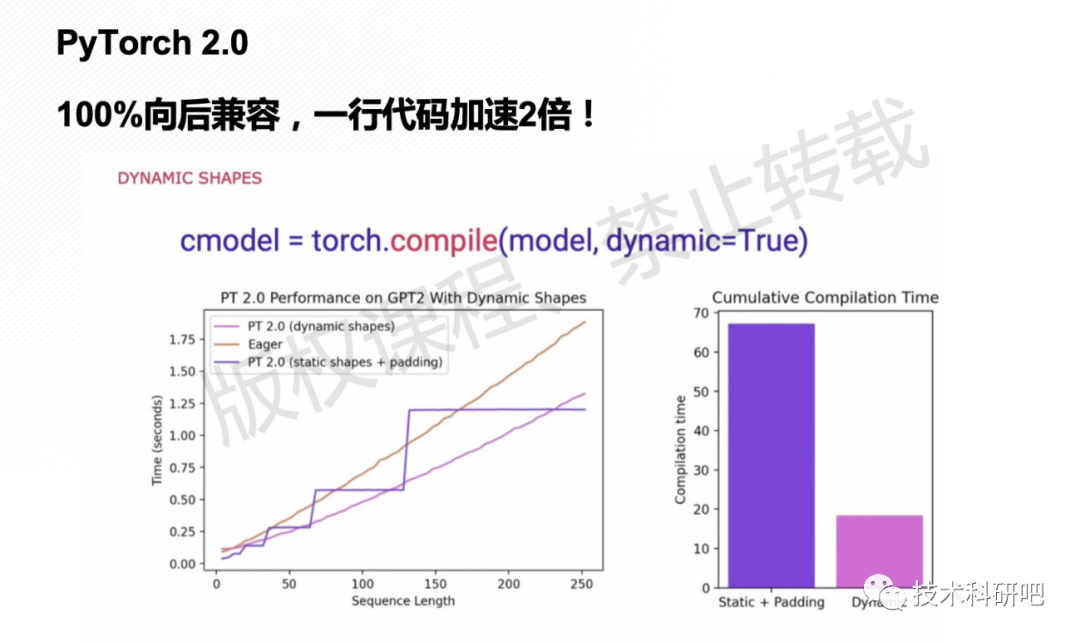
1.PyTorch
2.动态计算图,静态计算图等机制
3.PyTorch的使用
4.PyTorch的学习
5.PyTorch的基本使用与API
5.1.PyTorch图像分类任务
5.2.不同超参数,如初始化,学习率对结果的影响
5.3.使用PyTorch搭建神经网络并实现手写数字的分类
5.4.使用PyTorch修改模型并提升分类模型表现
三:卷积神经网络实践与目标检测
1.深度学习下的遥感影像目标检测基本知识
2.目标检测数据集的图像和标签表示方式
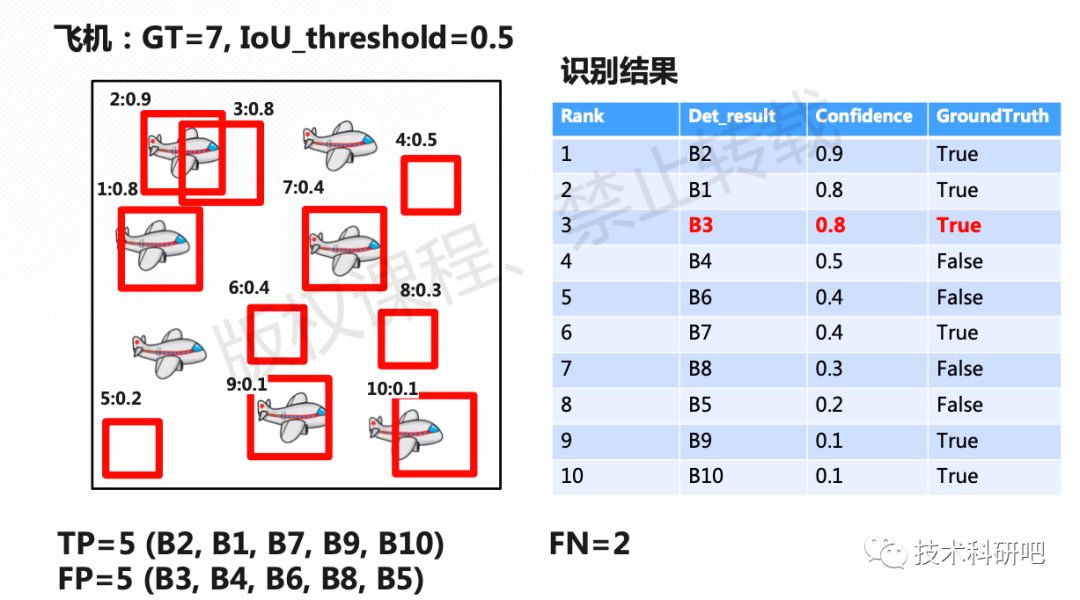
3.讲解目标检测模型的评估方案,包括正确率,精确率,召回率,mAP等
4.无人机影像的植物识别和统计
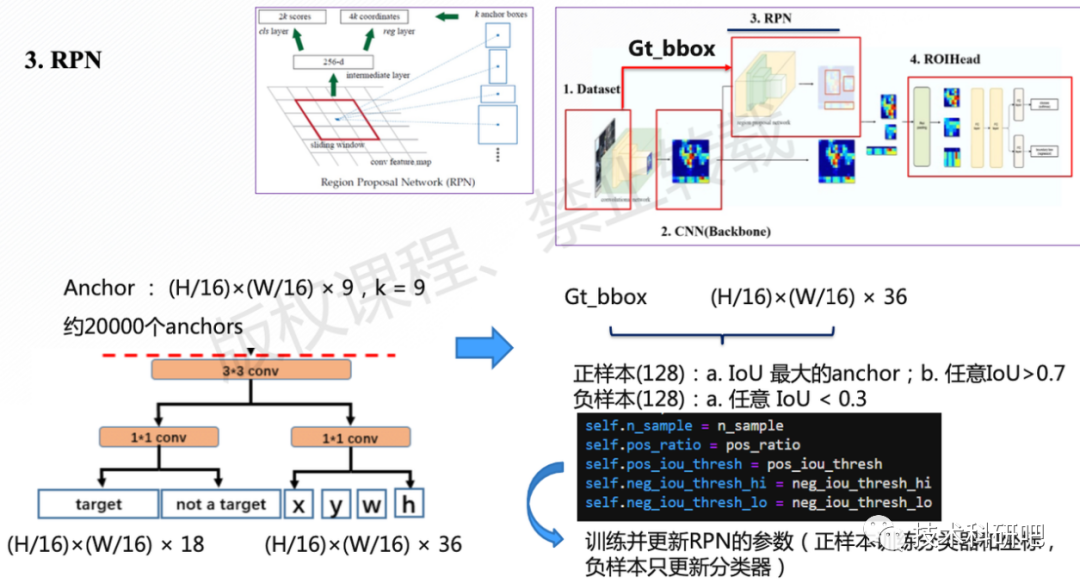
5.讲解two-stage(二阶)检测模型框架,RCNN, Fast RCNN, Faster RCNN等框
6.架的演变和差异
7.讲解 one-stage(一阶)检测模型框架,SDD ,Yolo等系列模型
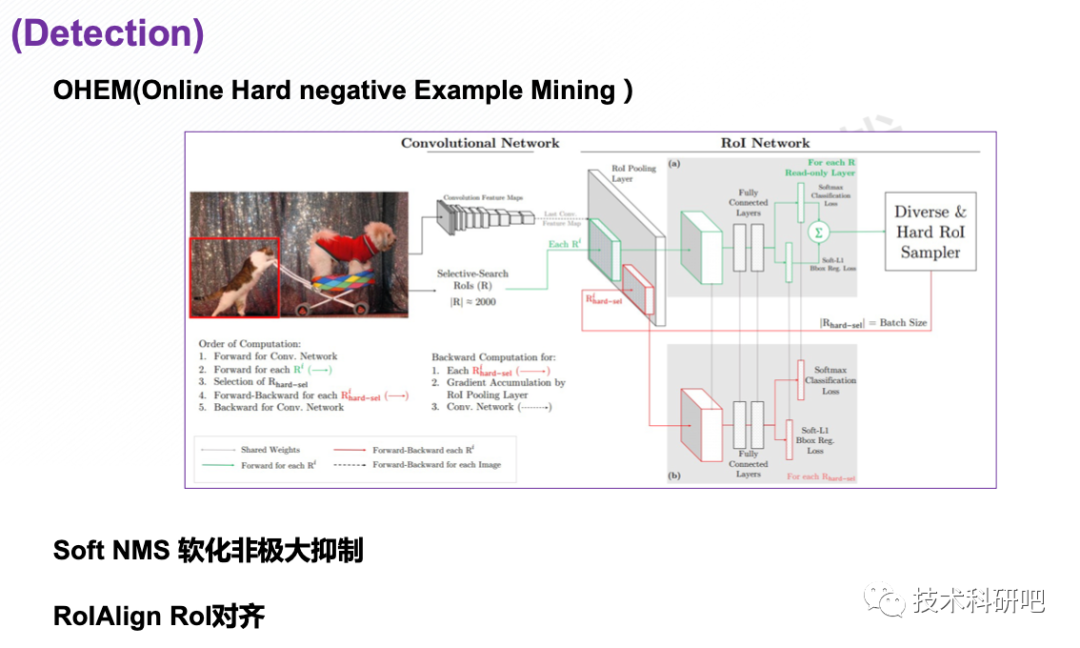
8.现有检测模型「CNN系列」发展小结,包括OHEM、FCN、DCN等模型
四:卷积神经网络的遥感影像目标检测任务【FasterRCNN】
1.一份完整的Faster-RCNN 模型下实现遥感影像的目标检测
2.讲解数据集的制作过程,包括数据的存储和处理
3.数据集标签的制作
4.模型的搭建,组合和训练
5.检测任数据集在验证过程中的注意事项
五:Transformer与遥感影像目标检测
1.从卷积运算到自注意力运算 self-attention
2.pytorch实现的自监督模块
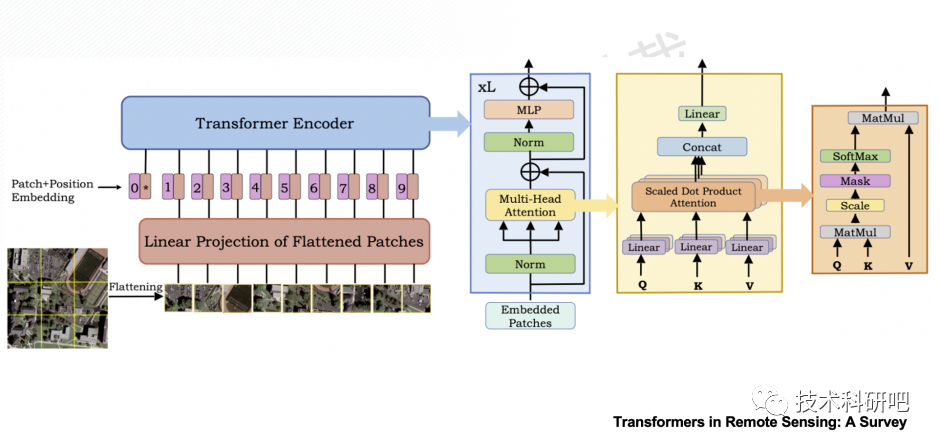
3.从Transformer到Vision Transformer (ViT)
4.ViT模型在遥感影像中的应用
六:Transformer的遥感影像目标检测任务【DETR】
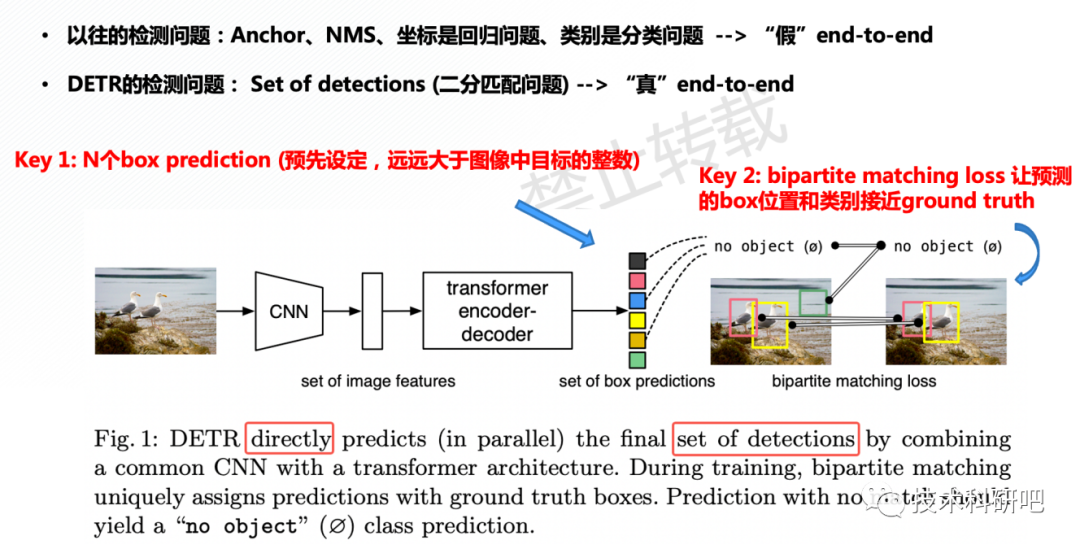
1.Transformer下的新目标检测范式,DETR
2.各类模型在遥感影像下的对比和调研
3.一份完整的DETR模型下实现遥感影像的目标检测
4.讲解针对检测任务的优化策略
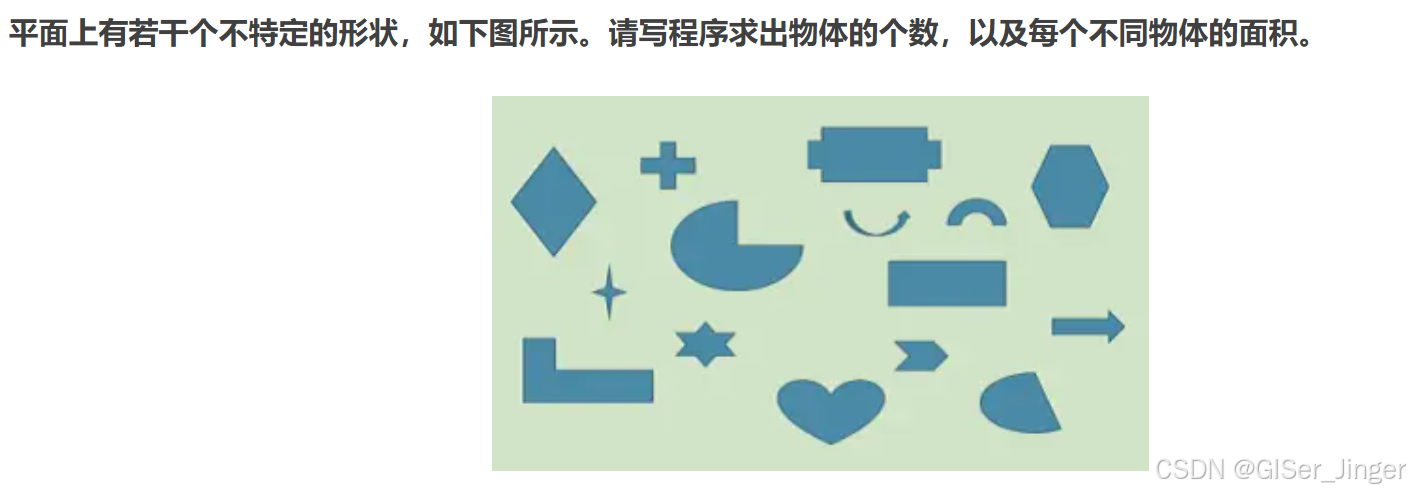
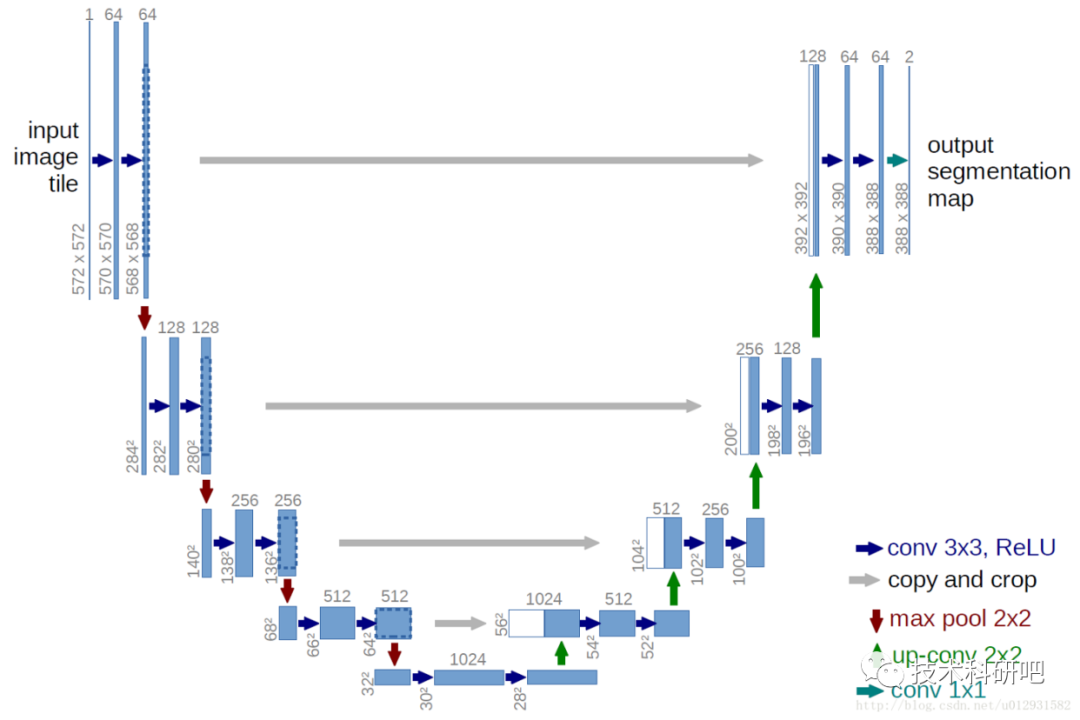
七:深度学习与遥感影像分割任务
1.深度学习下的遥感影像分割任务的基本
2.讲解FCN,SegNet,U-net等模型的差异
3.分割模型的发展小结
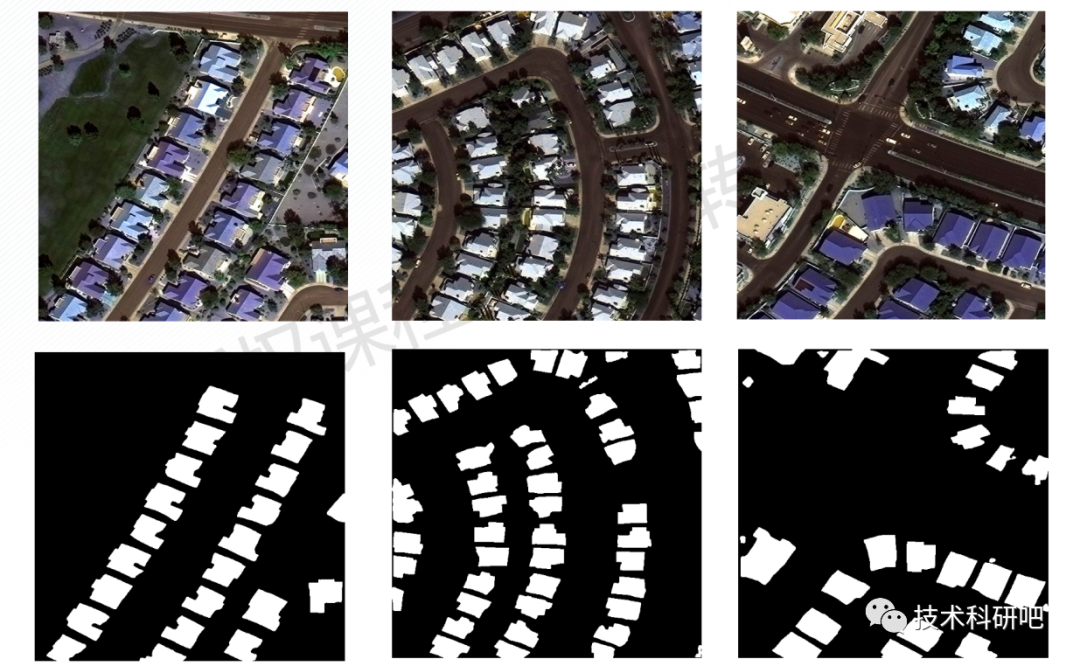
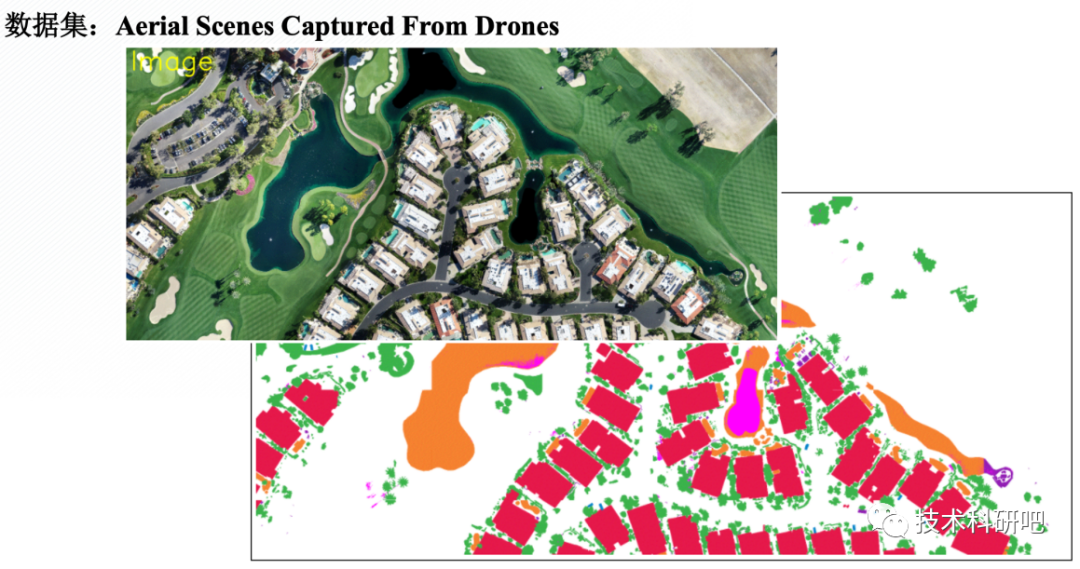
4.遥感影像分割任务和图像分割的差异
5.在遥感影像分割任务中的注意事项
数据集的准备和处理
遥感影像划分成小图像的策略
模型的构建和训练方法
验证集的使用过程中的注意事项
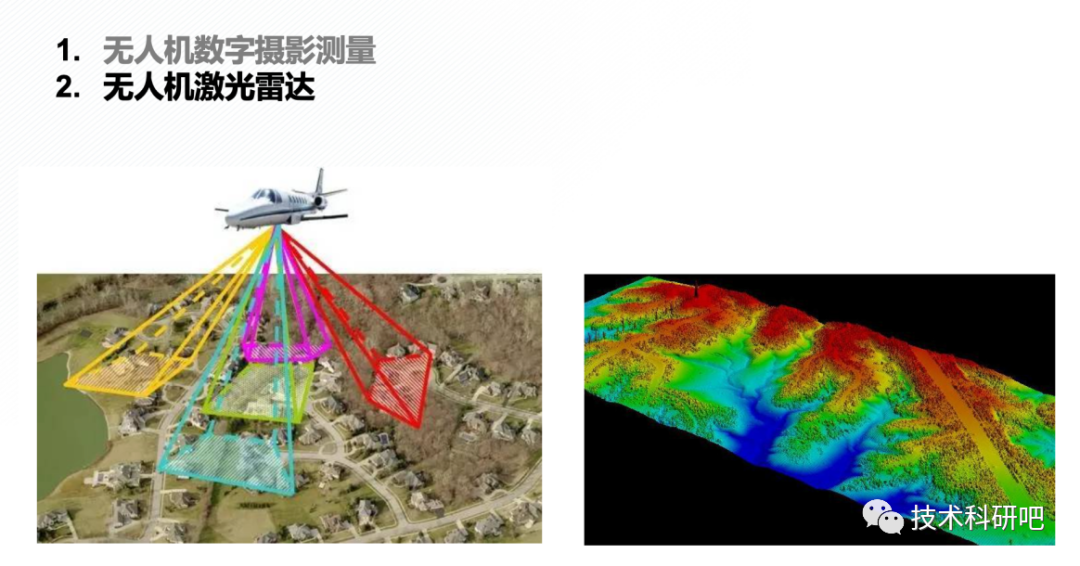
八:深度学习下的ASL(机载激光扫描仪)点云数据语义分类任务的基本知识
1.PointNet与PointNet++等模型的基本
2.点云数据的预处理和划分
3.点云数据的语义分割
4.点云数据的预测结果分析
九:遥感影像问题探讨与深度学习优化技巧
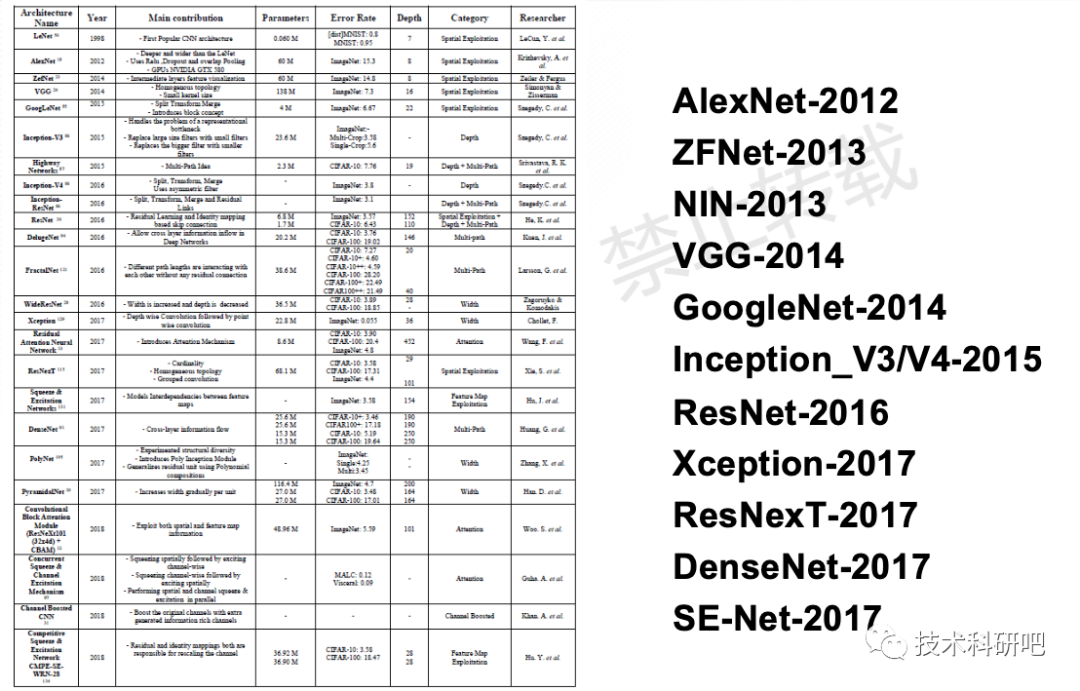
1.现有几个优秀模型结构的演变原理,包括AlexNet,VGG,googleNet,ResNet,DenseNet等模型
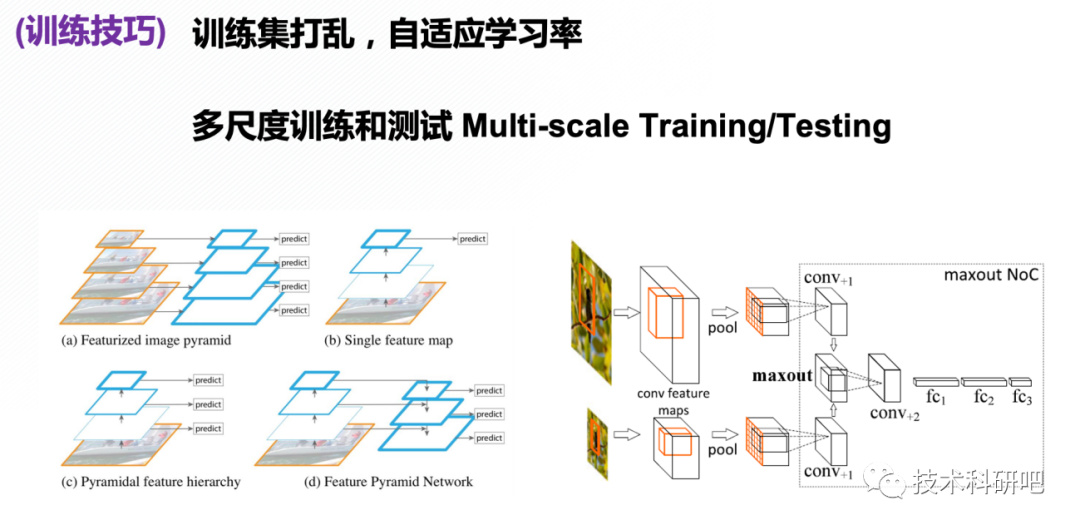
2.从模型演变中讲解实际训练模型的技巧
3.针对数据的优化策略
4.针对模型的优化策略
5.针对训练过程的优化策略
6.针对检测任务的优化策略
7.针对分割任务的优化策略
8.提供一些常用的检测,分割数据集的标注工具