【ROS 最简单教程 006/300】使用 launch 启动多个 ROS 节点
news2026/2/15 2:29:37


本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/1962547.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章

电商电子面单API对接方法
电商业务管理过程中,商家想要高效发货,使用电子面单是必不可少的,因为电子面单成本低、效率高,所以电商ERP、打单软件等这类应用对接电商电子面单API的需求量非常大。当应用通过电商电子面单API与电商平台、快递公司系统打通后&am…

Reranker技术
文章目录 Reranker技术0. 什么是RAG1. 什么是Reranker?2. Reranker在RAG技术中的应用3.使用 Reranker 的优缺点4.总结参考:知乎 Reranker技术
0. 什么是RAG
基础 RAG 的操作流程大致如下:首先,你需要将文本切分成小段࿰…

《深度RAG系列》 LLM 为什么选择了RAG
2023年是AIGC(Artificial Intelligence Generated Content)元年,这一年见证了人工智能生成内容领域的巨大飞跃,特别是大模型的爆发,它们在自然语言处理、图像生成、音频处理等多个领域展现出了惊人的能力。
这些预训练…

UVC驱动分析(一)
UVC驱动分析 UVC驱动简介Linux video框架分层UVC驱动注册UVC驱动注册入口函数UVC设备探测初始化UVC描述符解析V4L2设备注册UVC控制参数初始化UVC video驱动注册UVC 状态初始化 UVC驱动简介
UVC全称为USB Video Class,即:USB视频类,是一种为U…
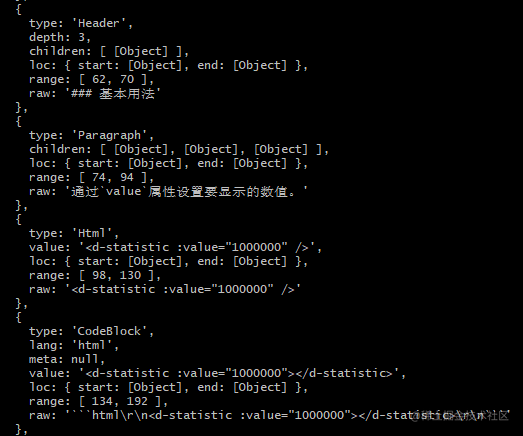
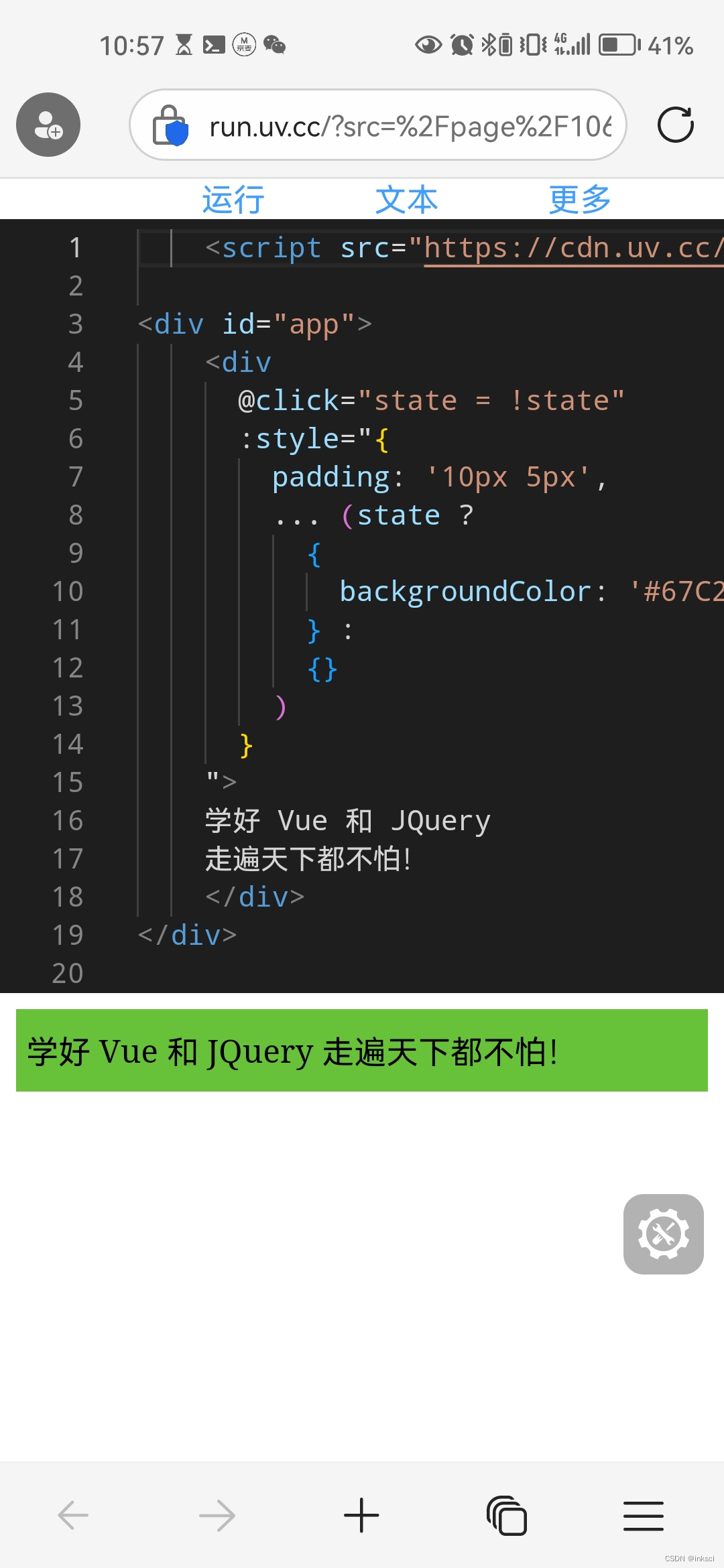
Vue组件库移动端预览实现原理
引言
大家如果使用过移动端组件库(比如:Vant),会发现在网站右侧有一个手机端的预览效果。 而且这个手机端预览的内容和外面的组件代码演示是同步的,切换组件的时候,移动端预览的内容也会发生相应的变化。 …

基于python的百度迁徙迁入、迁出数据分析(四)
这篇文章是对上篇文章的可获取数据的时间区间的修正,依然通过开发者模式找寻相关数据源,我直接把数据url贴在这里,可以发现里面包含了相对明面上看不到的数据包括,行政区id、春运迁徙数据等:qianxi.cdn.bcebos.com/app…

LYT-Net——轻量级网络低光照条件图像修复模型推理部署(C++/Python)
1.环境安装
conda create -n LYT_Torch python3.9 -y
conda activate LYT_Torchconda install pytorch torchvision torchaudio pytorch-cuda11.8 -c pytorch -c nvidiapip install matplotlib scikit-learn scikit-image opencv-python yacs joblib natsort h5py tqdm tensor…

Conformal low power-7.运行Conformal Low Power 1801流程
要获取有关原生1801流程的最新信息(例如功能、指南、常见问题解答和dofile脚本),请使用SET WEB_INTERFACE ON命令启动Web界面。 左手边列出了所有的Conformal产品。还有一个名为“Sample Dofiles”的部分,提供了在不同场景下运行C…

第一个Python Web程序
1、离线安装Django
由于Python是3.7版本,Django选择2.2.4版本,并且中间需要安装依赖包。全部安装包如下: 打开Anaconda Prompt,先进入Python3.7环境,然后依次安装各个包: 至此,Django离线安装成功。
2、编写第一个Django程序
2.1 创建Django项目
创建项目welcome时…

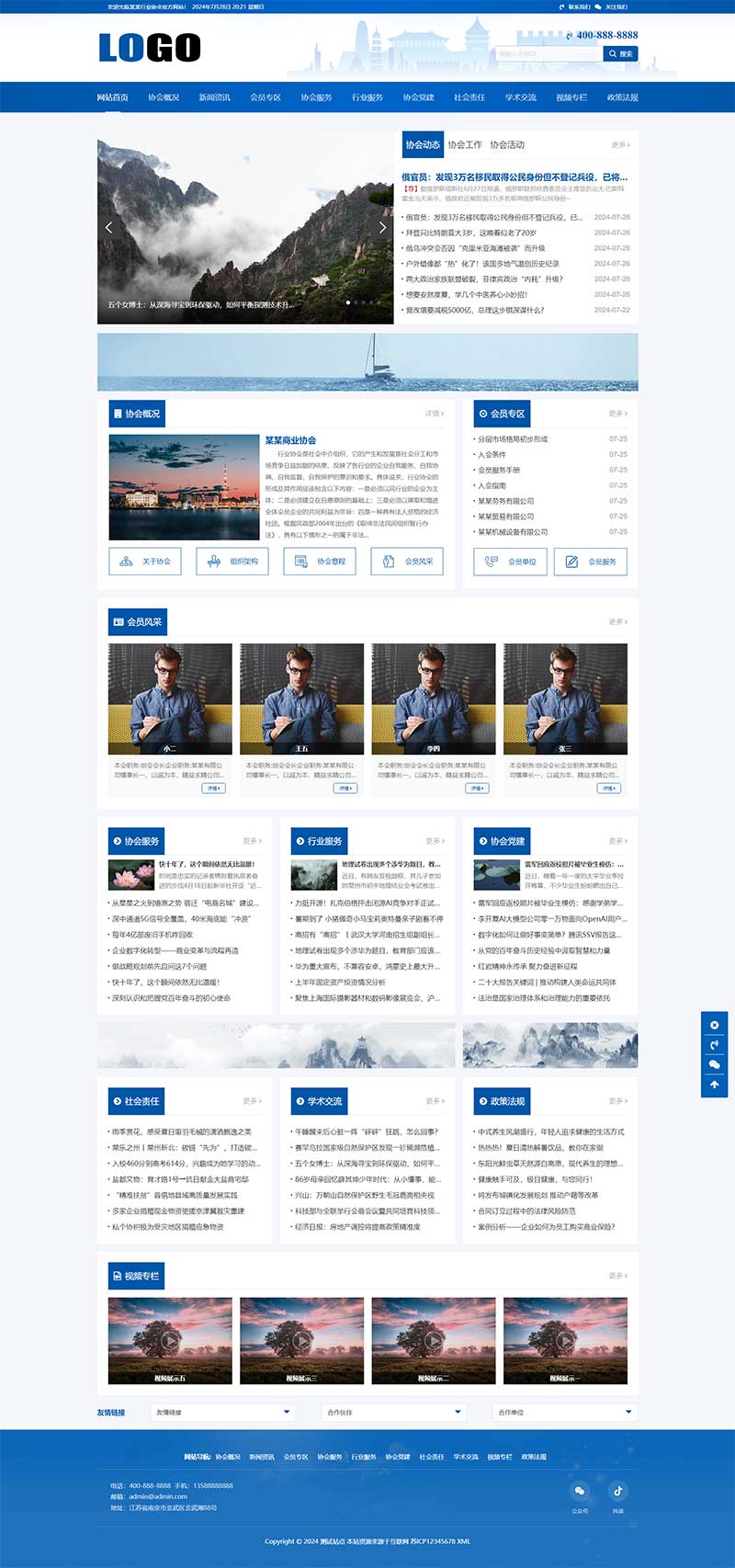
(自适应手机端)行业协会机构网站模板
(自适应手机端)行业协会机构网站模板PbootCMS内核开发的网站模板,该模板适用于行业协会网站等企业,当然其他行业也可以做,只需要把文字图片换成其他行业的即可;自适应手机端,同一个后台,数据即时同步&#…

基于SpringBoot+Vue的娱乐代理售票系统(带1w+文档)
基于SpringBootVue的娱乐代理售票系统(带1w文档) 基于SpringBootVue的娱乐代理售票系统(带1w文档) 休闲娱乐代理售票系统的开发运用java技术,MIS的总体思想,以及MYSQL等技术的支持下共同完成了该系统的开发,实现了休闲娱乐代理售票管理的信息…
Why decoder-only? LLM架构的演化之路
如何根据大模型架构进行选型
©作者|Zhongmei
来源|神州问学
引言 本文想为大型语言模型(LLMs)及其下游自然语言处理(NLP)任务的实践者和用户提供一份全面且实用的指南。将从模型架构的角度出发,对比不同架构的…

多线程上下文切换:详解与优化
多线程上下文切换:详解与优化 一、什么是多线程上下文切换?二、对性能的影响2.1 优点2.2 缺点 三、优化策略 💖The Begin💖点点关注,收藏不迷路💖 一、什么是多线程上下文切换?
多线程上下文切…

在 Vim 编辑器中,如果某个单词被意外地高亮显示,使用:noh可以取消高亮显示
文章目录 1、问题出现的背景2、解决办法 1、问题出现的背景
配置镜像加速器,修改 /etc/docker/daemon.json 目录下的文件,不小心高亮显示https,产生问题的步骤是,我先是按esc键退出vim的编辑模式,然后在https的前面按…

Android经典面试题之Kotlin中 if 和 let的区别
本文首发于公众号“AntDream”,欢迎微信搜索“AntDream”或扫描文章底部二维码关注,和我一起每天进步一点点 在Kotlin中,if和let虽然有时候用来处理相似的情景,但它们实际上是用于不同的场景并具有不同的性质。下面我们来详细对比…

安科瑞ASJ系列智能剩余电流继电器介绍
产品概述:
安科瑞ASJ系列智能剩余电流继电器是一种重要的电气安全保护设备,主要用于交流50Hz、额定电压400V及以下的TT和TN系统配电线路中。该系列继电器的主要功能包括对电气线路进行接地故障保护,以防止接地故障电流引起的设备损坏…