KMeans算法是一种经典的聚类方法,最早由Stuart Lloyd在1957年提出,并在1982年由J. MacQueen推广和普及。虽然KMeans已经有几十年的历史,但它依然是数据挖掘和机器学习领域中最常用的聚类算法之一。
数学原理
KMeans算法的目标是将数据集分成(k)个簇,每个簇的中心(质心)是该簇中所有点的平均值。算法的步骤如下:
-
初始化:随机选择(k)个初始质心。
-
分配数据点:将每个数据点分配到距离最近的质心。
-
更新质心:重新计算每个簇的质心,即该簇中所有点的平均值。
-
重复步骤2和3,直到质心不再变化或达到最大迭代次数。
用数学公式表示为:
-
初始质心:
-
分配数据点:
-
更新质心:
其中,表示第个簇的质心,表示第个簇,表示欧几里德距离。
其他聚类算法简要介绍
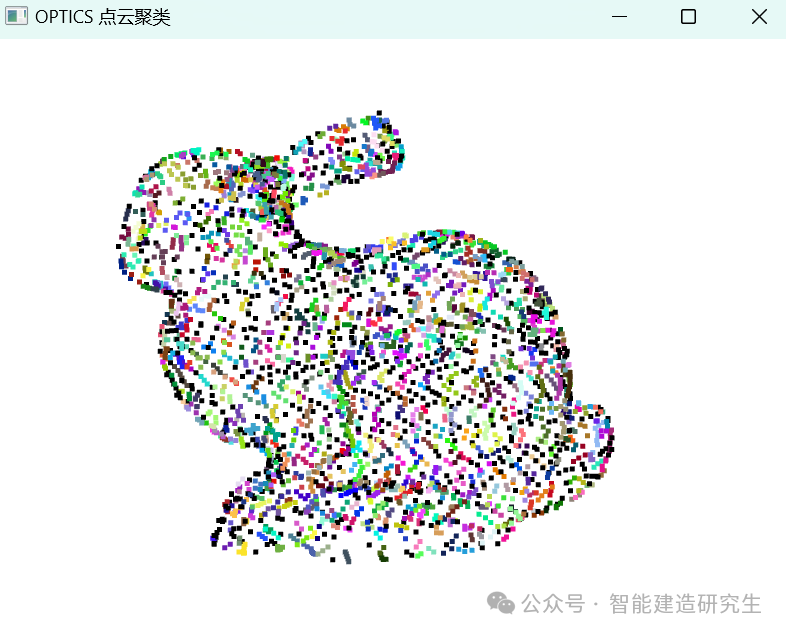
OPTICS(Ordering Points To Identify the Clustering Structure)
OPTICS算法通过分析数据点的可达性图来识别不同密度的簇,非常适合处理具有不同密度的复杂数据集。
import open3d as o3d
import numpy as np
from copy import deepcopy
from sklearn.cluster import OPTICS
if __name__ == '__main__':
file_path = 'rabbit.pcd'
pcd = o3d.io.read_point_cloud(file_path)
pcd = pcd.uniform_down_sample(10) # 每10个点采样一次
pcd.paint_uniform_color([0.5, 0.5, 0.5]) # 指定显示为灰色
print(pcd)
pcd1 = deepcopy(pcd)
points = np.array(pcd1.points)
result = OPTICS(min_samples=2, max_eps=5).fit(points)
labels = result.labels_
max_label = np.max(labels) + 1
colors = np.random.randint(255, size=(max_label+1, 3)) / 255.
colors = colors[labels]
colors[labels < 0] = 0 # 没有分类成功的点设置为黑色
pcd1.colors = o3d.utility.Vector3dVector(colors[:, :3])
o3d.visualization.draw_geometries([pcd1], window_name="OPTICS 点云聚类", width=800, height=600)
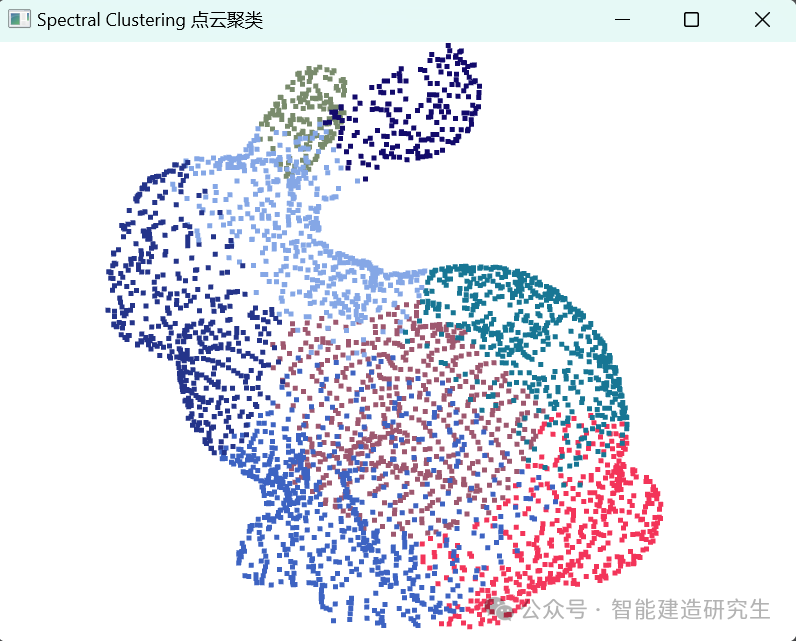
Spectral Clustering
Spectral Clustering利用数据的特征值和特征向量,将数据映射到一个低维空间中进行聚类,适合处理非凸形状的簇。
import open3d as o3d
import numpy as np
from copy import deepcopy
from sklearn.cluster import SpectralClustering
if __name__ == '__main__':
file_path = 'rabbit.pcd'
pcd = o3d.io.read_point_cloud(file_path)
pcd = pcd.uniform_down_sample(10) # 每10个点采样一次
pcd.paint_uniform_color([0.5, 0.5, 0.5]) # 指定显示为灰色
print(pcd)
pcd2 = deepcopy(pcd)
points = np.array(pcd2.points)
result = SpectralClustering(n_clusters=8).fit(points)
labels = result.labels_
max_label = np.max(labels) + 1
colors = np.random.randint(255, size=(max_label+1, 3)) / 255.
colors = colors[labels]
colors[labels < 0] = 0 # 没有分类成功的点设置为黑色
pcd2.colors = o3d.utility.Vector3dVector(colors[:, :3])
o3d.visualization.draw_geometries([pcd2], window_name="Spectral Clustering 点云聚类", width=800, height=600)
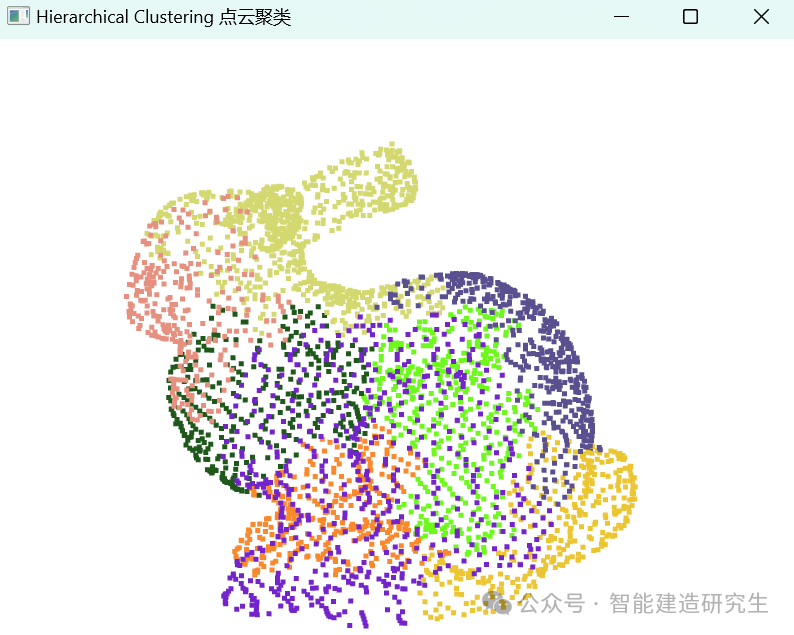
Hierarchical Clustering
Hierarchical Clustering分为凝聚层次聚类和分裂层次聚类,创建一棵树状结构(树状图)来表示数据点之间的层次关系。
import open3d as o3d
import numpy as np
from copy import deepcopy
from sklearn.cluster import AgglomerativeClustering
if __name__ == '__main__':
file_path = 'rabbit.pcd'
pcd = o3d.io.read_point_cloud(file_path)
pcd = pcd.uniform_down_sample(10) # 每10个点采样一次
pcd.paint_uniform_color([0.5, 0.5, 0.5]) # 指定显示为灰色
print(pcd)
pcd3 = deepcopy(pcd)
points = np.array(pcd3.points)
result = AgglomerativeClustering(n_clusters=8).fit(points)
labels = result.labels_
max_label = np.max(labels) + 1
colors = np.random.randint(255, size=(max_label+1, 3)) / 255.
colors = colors[labels]
colors[labels < 0] = 0 # 没有分类成功的点设置为黑色
pcd3.colors = o3d.utility.Vector3dVector(colors[:, :3])
o3d.visualization.draw_geometries([pcd3], window_name="Hierarchical Clustering 点云聚类", width=800, height=600)
Mean-shift
Mean-shift是一种基于密度的聚类方法,通过滑动窗口找到数据点密度的峰值,非常适合处理形状不规则的簇。
import open3d as o3d
import numpy as np
from copy import deepcopy
from sklearn.cluster import estimate_bandwidth, MeanShift
if __name__ == '__main__':
file_path = 'rabbit.pcd'
pcd = o3d.io.read_point_cloud(file_path)
pcd = pcd.uniform_down_sample(10) # 每10个点采样一次
pcd.paint_uniform_color([0.5, 0.5, 0.5]) # 指定显示为灰色
print(pcd)
pcd4 = deepcopy(pcd)
points = np.array(pcd4.points)
bandwidth = estimate_bandwidth(points, quantile=0.2, n_samples=500)
result = MeanShift(bandwidth=bandwidth).fit(points)
labels = result.labels_
max_label = np.max(labels) + 1
colors = np.random.randint(255, size=(max_label+1, 3)) / 255.
colors = colors[labels]
colors[labels < 0] = 0 # 没有分类成功的点设置为黑色
pcd4.colors = o3d.utility.Vector3dVector(colors[:, :3])
o3d.visualization.draw_geometries([pcd4], window_name="Mean-shift 点云聚类", width=800, height=600)

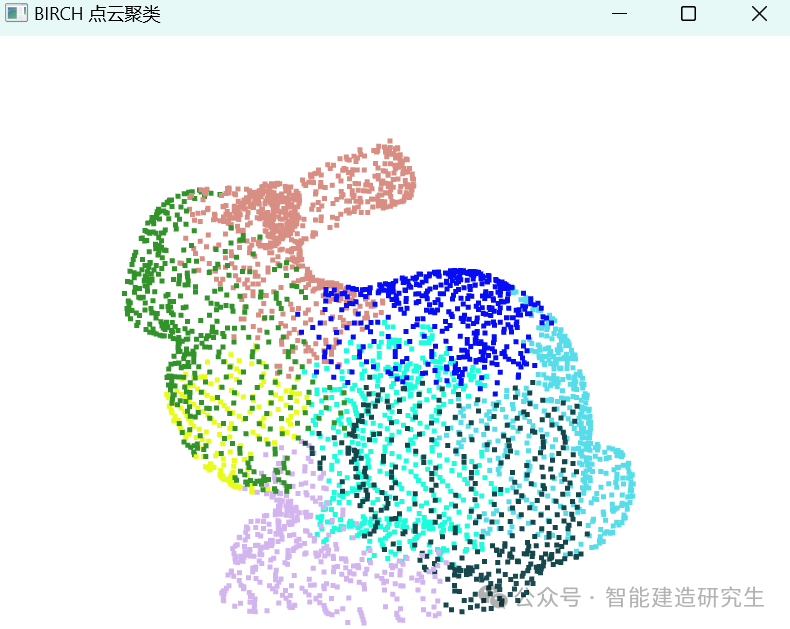
BIRCH(Balanced Iterative Reducing and Clustering using Hierarchies)
BIRCH算法通过构建一个高度平衡的树结构,进行逐步聚类,适用于大规模数据集。
import open3d as o3d
import numpy as np
from copy import deepcopy
from sklearn.cluster import Birch
if __name__ == '__main__':
file_path = 'rabbit.pcd'
pcd = o3d.io.read_point_cloud(file_path)
pcd = pcd.uniform_down_sample(10) # 每10个点采样一次
pcd.paint_uniform_color([0.5, 0.5, 0.5]) # 指定显示为灰色
print(pcd)
pcd5 = deepcopy(pcd)
points = np.array(pcd5.points)
result = Birch(n_clusters=8).fit(points)
labels = result.labels_
max_label = np.max(labels) + 1
colors = np.random.randint(255, size=(max_label+1, 3)) / 255.
colors = colors[labels]
colors[labels < 0] = 0 # 没有分类成功的点设置为黑色
pcd5.colors = o3d.utility.Vector3dVector(colors[:, :3])
o3d.visualization.draw_geometries([pcd5], window_name="BIRCH 点云聚类", width=800, height=600)
Affinity Propagation
Affinity Propagation通过传递“信息”在数据点之间找到一组最能代表其他数据点的“示例”,不需要预先指定簇的数量。
import open3d as o3d
import numpy as np
from copy import deepcopy
from sklearn.cluster import AffinityPropagation
if __name__ == '__main__':
file_path = 'rabbit.pcd'
pcd = o3d.io.read_point_cloud(file_path)
pcd = pcd.uniform_down_sample(10) # 每10个点采样一次
pcd.paint_uniform_color([0.5, 0.5, 0.5]) # 指定显示为灰色
print(pcd)
pcd6 = deepcopy(pcd)
points = np.array(pcd6.points)
result = AffinityPropagation(preference=-20).fit(points)
labels = result.labels_
max_label = np.max(labels) + 1
colors = np.random.randint(255, size=(max_label+1, 3)) / 255.
colors = colors[labels]
colors[labels < 0] = 0 # 没有分类成功的点设置为黑色
pcd6.colors = o3d.utility.Vector3dVector(colors[:, :3])
o3d.visualization.draw_geometries([pcd6], window_name="Affinity Propagation 点云聚类", width=800, height=600)

以上所有的聚类算法同时对目标点云数据进行聚类的结果如下:
# -*- coding: utf-8 -*-
"""
乐乐感知学堂公众号
@author: https://blog.csdn.net/suiyingy
"""
import open3d as o3d
import numpy as np
from copy import deepcopy
from sklearn.cluster import OPTICS, SpectralClustering, AgglomerativeClustering, estimate_bandwidth, MeanShift, Birch, AffinityPropagation
if __name__ == '__main__':
file_path = 'rabbit.pcd'
pcd = o3d.io.read_point_cloud(file_path)
pcd = pcd.uniform_down_sample(10)#每50个点采样一次
pcd.paint_uniform_color([0.5, 0.5, 0.5])#指定显示为灰色
print(pcd)
pcd1 = deepcopy(pcd)
pcd1.translate((20, 0, 0)) #整体进行x轴方向平移20
points = np.array(pcd1.points)
result = OPTICS(min_samples=2, max_eps=5).fit(points)
#各个类别中心
# labels返回聚类成功的类别,从0开始,每个数据表示一个类别
labels = result.labels_
#最大值相当于共有多少个类别
max_label = np.max(labels) + 1 #从0开始计算标签
print(max(labels))
#生成k个类别的颜色,k表示聚类成功的类别
colors = np.random.randint(255, size=(max_label+1, 3))/255.
colors = colors[labels]
#没有分类成功的点设置为黑色
colors[labels < 0] = 0
pcd1.colors = o3d.utility.Vector3dVector(colors[:, :3])
pcd2 = deepcopy(pcd)
pcd2.translate((-20, 0, 0)) #整体进行x轴方向平移-20
points = np.array(pcd2.points)
result = SpectralClustering(n_clusters=8).fit(points)
#各个类别中心
# labels返回聚类成功的类别,从0开始,每个数据表示一个类别
labels = result.labels_
#最大值相当于共有多少个类别
max_label = np.max(labels) + 1 #从0开始计算标签
print(max(labels))
#生成k个类别的颜色,k表示聚类成功的类别
colors = np.random.randint(255, size=(max_label+1, 3))/255.
colors = colors[labels]
#没有分类成功的点设置为黑色
colors[labels < 0] = 0
pcd2.colors = o3d.utility.Vector3dVector(colors[:, :3])
pcd3 = deepcopy(pcd)
pcd3.translate((0, 20, 0)) #整体进行y轴方向平移20
points = np.array(pcd3.points)
result = AgglomerativeClustering(n_clusters=8).fit(points)
#各个类别中心
# labels返回聚类成功的类别,从0开始,每个数据表示一个类别
labels = result.labels_
#最大值相当于共有多少个类别
max_label = np.max(labels) + 1 #从0开始计算标签
print(max(labels))
#生成k个类别的颜色,k表示聚类成功的类别
colors = np.random.randint(255, size=(max_label+1, 3))/255.
colors = colors[labels]
#没有分类成功的点设置为黑色
colors[labels < 0] = 0
pcd3.colors = o3d.utility.Vector3dVector(colors[:, :3])
pcd4 = deepcopy(pcd)
pcd4.translate((0, -20, 0)) #整体进行y轴方向平移-20
points = np.array(pcd4.points)
#定义搜索半径,也可以直接初始化一个数值
bandwidth = estimate_bandwidth(points, quantile=0.2, n_samples=500)
result = MeanShift(bandwidth=bandwidth).fit(points)
#各个类别中心
# labels返回聚类成功的类别,从0开始,每个数据表示一个类别
labels = result.labels_
#最大值相当于共有多少个类别
max_label = np.max(labels) + 1 #从0开始计算标签
print(max(labels))
#生成k个类别的颜色,k表示聚类成功的类别
colors = np.random.randint(255, size=(max_label+1, 3))/255.
colors = colors[labels]
#没有分类成功的点设置为黑色
colors[labels < 0] = 0
pcd4.colors = o3d.utility.Vector3dVector(colors[:, :3])
pcd5 = deepcopy(pcd)
pcd5.translate((40, 0, 0)) #整体进行x轴方向平移40
points = np.array(pcd5.points)
result = Birch(n_clusters=8).fit(points)
#各个类别中心
# labels返回聚类成功的类别,从0开始,每个数据表示一个类别
labels = result.labels_
#最大值相当于共有多少个类别
max_label = np.max(labels) + 1 #从0开始计算标签
print(max(labels))
#生成k个类别的颜色,k表示聚类成功的类别
colors = np.random.randint(255, size=(max_label+1, 3))/255.
colors = colors[labels]
#没有分类成功的点设置为黑色
colors[labels < 0] = 0
pcd5.colors = o3d.utility.Vector3dVector(colors[:, :3])
pcd6 = deepcopy(pcd)
pcd6.translate((-40, 0, 0)) #整体进行x轴方向平移-40
points = np.array(pcd6.points)
result = AffinityPropagation(preference=-20).fit(points)
#各个类别中心
# labels返回聚类成功的类别,从0开始,每个数据表示一个类别
labels = result.labels_
#最大值相当于共有多少个类别
max_label = np.max(labels) + 1 #从0开始计算标签
print(max(labels))
#生成k个类别的颜色,k表示聚类成功的类别
colors = np.random.randint(255, size=(max_label+1, 3))/255.
colors = colors[labels]
#没有分类成功的点设置为黑色
colors[labels < 0] = 0
pcd6.colors = o3d.utility.Vector3dVector(colors[:, :3])
# 点云显示
o3d.visualization.draw_geometries([pcd, pcd1, pcd2, pcd3, pcd4, pcd5, pcd6], #点云列表
window_name="点云聚类",
point_show_normal=False,
width=800, # 窗口宽度
height=600) # 窗口高度

KMeans可视化算法实例
以下是一个使用Open3D进行KMeans聚类的示例:
import open3d as o3d
import numpy as np
from sklearn.cluster import KMeans
if __name__ == '__main__':
file_path = 'rabbit.pcd'
pcd = o3d.io.read_point_cloud(file_path)
pcd.paint_uniform_color([0.5, 0.5, 0.5])#指定显示为灰色
print(pcd)
points = np.array(pcd.points)
result = KMeans(n_clusters=8).fit(points)
#各个类别中心
center = result.cluster_centers_
# labels返回聚类成功的类别,从0开始,每个数据表示一个类别
labels = result.labels_
#最大值相当于共有多少个类别
max_label = np.max(labels) + 1 #从0开始计算标签
print(max(labels))
#生成k个类别的颜色,k表示聚类成功的类别
colors = np.random.randint(255, size=(max_label, 3))/255.
colors = colors[labels]
pcd.colors = o3d.utility.Vector3dVector(colors[:, :3])
# 点云显示
o3d.visualization.draw_geometries([pcd], #点云列表
window_name="Kmeans点云聚类",
point_show_normal=False,
width=800, # 窗口宽度
height=600) # 窗口高度

以上内容总结自网络,如有帮助欢迎关注与转发,我们下次再见!








![[2019红帽杯]Snake](https://i-blog.csdnimg.cn/direct/1f862b612ccd4d0c8c58dbf15f8ccbef.png)