目录
1.算法运行效果图预览
2.算法运行软件版本
3.部分核心程序
4.算法理论概述
5.算法完整程序工程
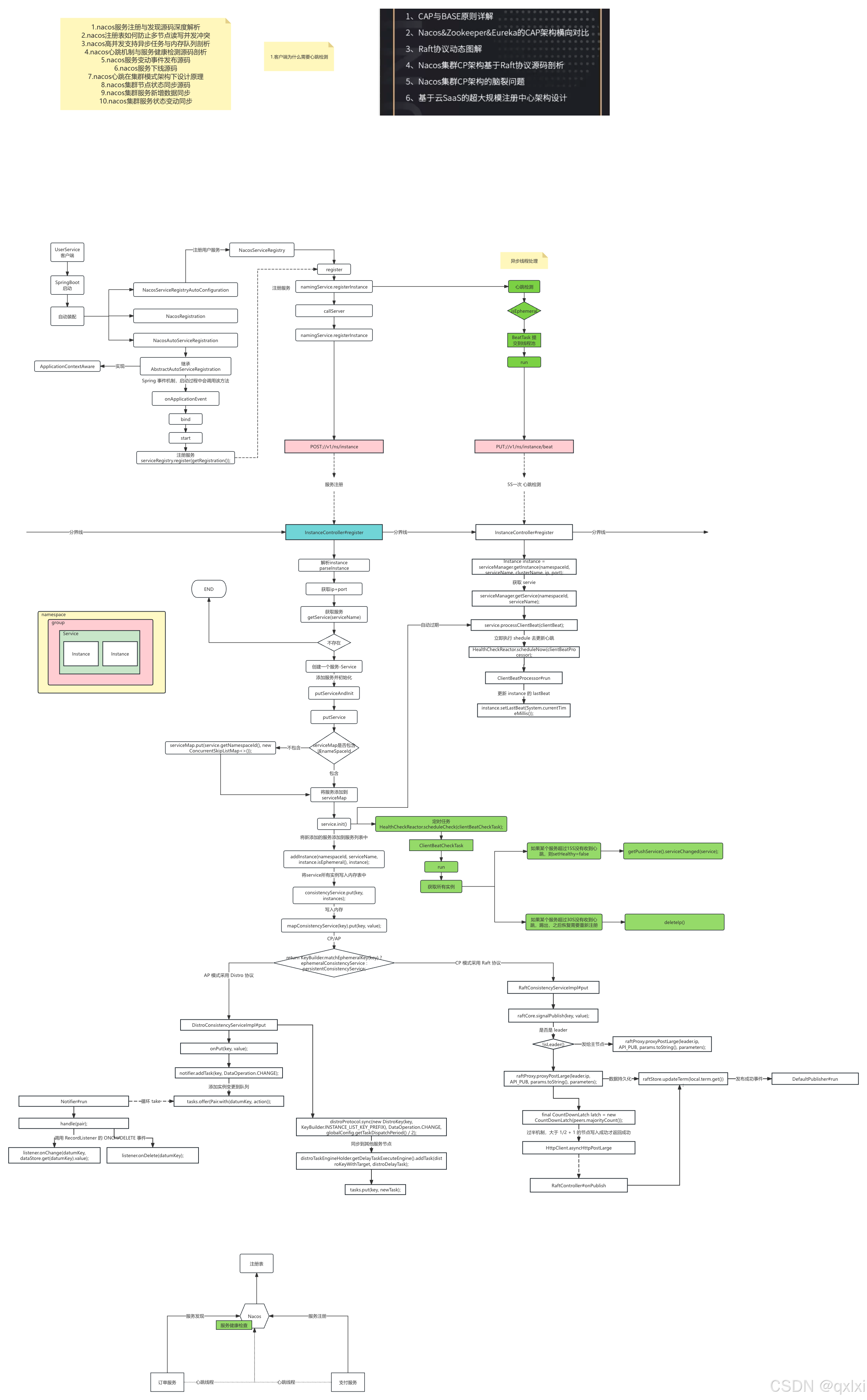
1.算法运行效果图预览
(完整程序运行后无水印)




在三维图中,幅度越大,则表示人员更习惯的行走路线。
2.算法运行软件版本
matlab2022a
3.部分核心程序
(完整版代码包含详细中文注释和操作步骤视频)
for j=1:length(inds)
% 调整边界框格式
[R_,C_] = find(lb == inds(j));
upLPoint = min([R_ C_]);
dWindow = max([R_ C_]) - upLPoint + 1;
box = [fliplr(upLPoint) fliplr(dWindow)];
% 绘制边界框
rectangle('Position', box, 'EdgeColor', [1 1 1], 'linewidth', 2);
% 如果不是第一帧,计算区域的标签(轨迹关联)
if i ~= 0
overlap = 0;
smax = 0;
imax = 0;
% 查找与上一帧区域的最大交集
for r=1:length(Box1_save)
if rectint(box, Box1_save{r}) > smax
overlap = 1;
smax = rectint(box, Box1_save{r});
imax = Idx1_save(r);
end
end
% 若无交集,则分配新标签
if overlap == 0
if j ~= 1
imax = max(max(Idx1_save), max(Idx2_save)) + 1;
else
imax = max(Idx1_save) + 1;
end
end
% 更新当前帧的边界框和索引列表
Box2_save{end+1} = box;
Idx2_save(end+1) = imax;
else
Box2_save{end+1} = box;
Idx2_save(end+1) = j;
end
% 更新last_fr中动态轨迹的质心信息
info_save{rem(i,Lsmth)+1}(end+1) = I_reg(inds(j)).Centroid(1);
info_save{rem(i,Lsmth)+1}(end+1) = I_reg(inds(j)).Centroid(2);
end
1614.算法理论概述
基于视觉工具箱和背景差法的行人检测、行走轨迹跟踪以及人员行走习惯统计是视频监控和智能分析领域的重要应用。
背景差法是一种经典的运动目标检测技术,其核心思想是通过比较当前帧与背景模型的差异来识别运动物体。具体步骤如下:
首先,需要构建背景模型。这通常通过帧平均、高斯混合模型(Gaussian Mixture Model, GMM)等方法实现。以GMM为例,假设场景中的每个像素值xi服从一个混合高斯分布,可表示为:
![]()
其中,πk是第k个高斯成分的混合权重,μk和Σk分别是该成分的均值和协方差矩阵,K是高斯分量的数量。
对于新到来的一帧图像,每个像素的像素值xnew,i与背景模型比较,计算其属于背景的概率。若概率低于某一阈值θ,则认为该像素属于前景,表示可能是移动的人或物。具体计算为:

行走习惯统计涉及对个体或群体的行走路径、速度、停留时间等行为特征进行分析。这通常需要先通过上述步骤获取每个人的轨迹,然后进行模式识别和数据分析。对于每条行人轨迹,可以提取诸如行程时间、平均速度、轨迹长度、驻留点(停留时间超过阈值的区域)等特征。例如,平均速度Vavg可由总距离除以总时间计算得出:

5.算法完整程序工程
OOOOO
OOO
O