Tip: 如果你在进行深度学习、自动驾驶、模型推理、微调或AI绘画出图等任务,并且需要GPU资源,可以考虑使用UCloud云计算旗下的Compshare的GPU算力云平台。他们提供高性价比的4090 GPU,按时收费每卡2.6元,月卡只需要1.7元每小时,并附带200G的免费磁盘空间。通过链接注册并联系客服,可以获得20元代金券(相当于6-7H的免费GPU资源)。欢迎大家体验一下~
0. 简介
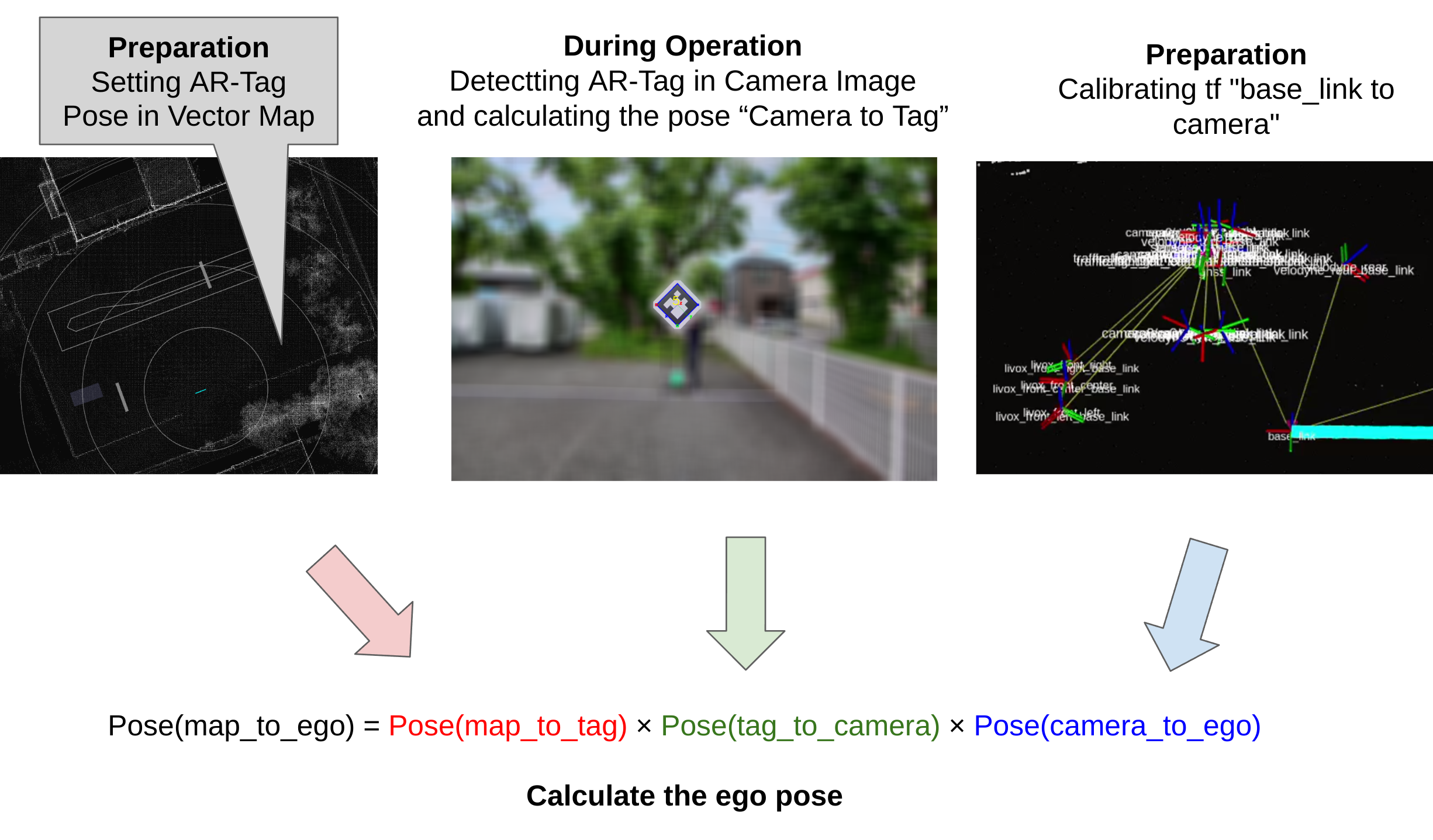
这一讲按照《Autoware 技术代码解读(三)》梳理的顺序,我们来说一说Autoware中基于地标的定位,这里的地标可以是:相机检测到的AR标签,还可以是通过LiDAR检测到的强度特征的板块。由于这些地标易于检测和估计姿态,如果地图上预先标注了地标的姿态,那么可以从检测到的地标的姿态计算出自我姿态。
1. 代码阅读
1.1 基于ar_tag的定位功能
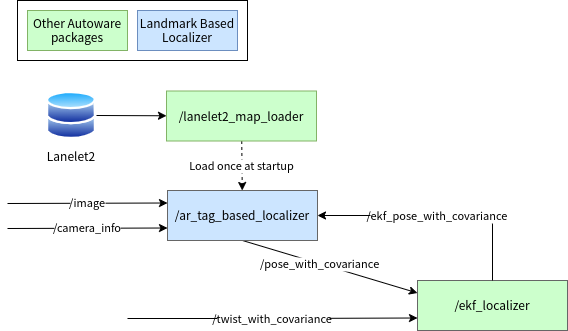
该代码实现了一个基于ArUco标记的定位器节点,其中包含了构造函数和设置节点参数、日志记录、tf变换、图像传输、订阅者和发布者等功能。设置函数setup()用于初始化节点参数、日志记录、tf变换、图像传输、订阅者和发布者等。通过订阅地图数据和图像数据,进行ArUco标记的检测,并将检测到的标记位置信息发布出去。同时,还会根据相机信息进行相机参数的设置,并根据EKF姿态信息发布位置信息。
setup()函数中,通过声明节点参数、设置检测模式、初始化tf变换的缓冲区、监听器和广播器、初始化图像传输、设置订阅者和发布者等,完成了节点的初始化工作。在地图数据回调函数中,解析特定类型的地标信息并发布可视化消息;在图像数据回调函数中,进行ArUco标记的检测,并在图像中绘制检测到的标记,然后发布处理后的图像和诊断信息;相机信息回调函数用于设置相机参数;EKF姿态信息回调函数用于保存最新的姿态信息。最后,根据ArUco标记的位置信息,将位置信息发布为tf变换,并进行位置信息的计算和发布。这个流程主要依赖以下三个函数:
- map_bin_callback()函数:当接收到地图数据时,解析地图中的特定类型的地标信息,并将其转换为可视化消息后发布出去。
- image_callback()函数:当接收到图像数据时,进行ArUco标记的检测,并在图像中绘制检测到的标记,然后发布处理后的图像和诊断信息。
- publish_pose_as_base_link()函数:将相机到ArUco标记的位置信息发布为tf变换,并计算位置信息。
/// @brief 构造函数
/// @param options ros2节点选项
ArTagBasedLocalizer::ArTagBasedLocalizer(const rclcpp::NodeOptions & options)
: Node("ar_tag_based_localizer", options), cam_info_received_(false)
{
}
/// @brief 用于设置节点参数、日志记录、tf变换、图像传输、订阅者和发布者
/// @return
bool ArTagBasedLocalizer::setup()
{
/*
Declare node parameters
*/
marker_size_ = static_cast<float>(this->declare_parameter<double>("marker_size"));
target_tag_ids_ = this->declare_parameter<std::vector<std::string>>("target_tag_ids");
base_covariance_ = this->declare_parameter<std::vector<double>>("base_covariance");
distance_threshold_squared_ = std::pow(this->declare_parameter<double>("distance_threshold"), 2);
ekf_time_tolerance_ = this->declare_parameter<double>("ekf_time_tolerance");
ekf_position_tolerance_ = this->declare_parameter<double>("ekf_position_tolerance");
std::string detection_mode = this->declare_parameter<std::string>("detection_mode");//设置 ArUco 检测器的检测模式
float min_marker_size = static_cast<float>(this->declare_parameter<double>("min_marker_size"));
if (detection_mode == "DM_NORMAL") {
detector_.setDetectionMode(aruco::DM_NORMAL, min_marker_size);
} else if (detection_mode == "DM_FAST") {
detector_.setDetectionMode(aruco::DM_FAST, min_marker_size);
} else if (detection_mode == "DM_VIDEO_FAST") {
detector_.setDetectionMode(aruco::DM_VIDEO_FAST, min_marker_size);
} else {
// Error
RCLCPP_ERROR_STREAM(this->get_logger(), "Invalid detection_mode: " << detection_mode);
return false;
}
/*
Log parameter info
*/
RCLCPP_INFO_STREAM(this->get_logger(), "min_marker_size: " << min_marker_size);
RCLCPP_INFO_STREAM(this->get_logger(), "detection_mode: " << detection_mode);
RCLCPP_INFO_STREAM(this->get_logger(), "thresMethod: " << detector_.getParameters().thresMethod);
RCLCPP_INFO_STREAM(this->get_logger(), "marker_size_: " << marker_size_);
/*
初始化 tf 变换的缓冲区、监听器和广播器
*/
tf_buffer_ = std::make_unique<tf2_ros::Buffer>(this->get_clock());
tf_listener_ = std::make_unique<tf2_ros::TransformListener>(*tf_buffer_);
tf_broadcaster_ = std::make_unique<tf2_ros::TransformBroadcaster>(this);
/*
Initialize image transport
*/
it_ = std::make_unique<image_transport::ImageTransport>(shared_from_this());
/*
Subscribers
*/
map_bin_sub_ = this->create_subscription<HADMapBin>(
"~/input/lanelet2_map", rclcpp::QoS(10).durability(rclcpp::DurabilityPolicy::TransientLocal),
std::bind(&ArTagBasedLocalizer::map_bin_callback, this, std::placeholders::_1));
//初始化图像传输
rclcpp::QoS qos_sub(rclcpp::QoSInitialization::from_rmw(rmw_qos_profile_default));
qos_sub.best_effort();
image_sub_ = this->create_subscription<Image>(
"~/input/image", qos_sub,
std::bind(&ArTagBasedLocalizer::image_callback, this, std::placeholders::_1));
cam_info_sub_ = this->create_subscription<CameraInfo>(
"~/input/camera_info", qos_sub,
std::bind(&ArTagBasedLocalizer::cam_info_callback, this, std::placeholders::_1));
ekf_pose_sub_ = this->create_subscription<PoseWithCovarianceStamped>(
"~/input/ekf_pose", qos_sub,
std::bind(&ArTagBasedLocalizer::ekf_pose_callback, this, std::placeholders::_1));
/*
Publishers
*/
rclcpp::QoS qos_marker = rclcpp::QoS(rclcpp::KeepLast(10));
qos_marker.transient_local();
qos_marker.reliable();
marker_pub_ = this->create_publisher<MarkerArray>("~/debug/marker", qos_marker);
rclcpp::QoS qos_pub(rclcpp::QoSInitialization::from_rmw(rmw_qos_profile_default));
image_pub_ = it_->advertise("~/debug/result", 1);
pose_pub_ =
this->create_publisher<PoseWithCovarianceStamped>("~/output/pose_with_covariance", qos_pub);
diag_pub_ = this->create_publisher<DiagnosticArray>("/diagnostics", qos_pub);
RCLCPP_INFO(this->get_logger(), "Setup of ar_tag_based_localizer node is successful!");
return true;
}
/// @brief 当接收到地图数据时,该回调函数会解析地图中的特定类型的地标信息,并将其转换为可视化消息后发布出去
/// @param msg 类型为 HADMapBin::ConstSharedPtr 的地图数据指针
void ArTagBasedLocalizer::map_bin_callback(const HADMapBin::ConstSharedPtr & msg)
{
const std::vector<landmark_manager::Landmark> landmarks =
landmark_manager::parse_landmarks(msg, "apriltag_16h5", this->get_logger());//提取特定类型的地标信息,并将其转换为 Landmark 结构体的向量
for (const landmark_manager::Landmark & landmark : landmarks) {
landmark_map_[landmark.id] = landmark.pose;//解析得到的地标信息存储到 landmark_map_ 中
}
const MarkerArray marker_msg = landmark_manager::convert_landmarks_to_marker_array_msg(landmarks);
marker_pub_->publish(marker_msg);
}
/// @brief 当接收到图像数据时,该回调函数会进行 ArUco 标记的检测,并在图像中绘制检测到的标记,然后发布处理后的图像和诊断信息。
/// @param msg 类型为 Image::ConstSharedPtr 的图像数据指针
void ArTagBasedLocalizer::image_callback(const Image::ConstSharedPtr & msg)
{
//检查是否有订阅者,如果没有则不进行 ArUco 标记的检测
if ((image_pub_.getNumSubscribers() == 0) && (pose_pub_->get_subscription_count() == 0)) {
RCLCPP_DEBUG(this->get_logger(), "No subscribers, not looking for ArUco markers");
return;
}
//检查是否已接收到相机信息
if (!cam_info_received_) {
RCLCPP_DEBUG(this->get_logger(), "No cam_info has been received.");
return;
}
//将图像数据转换为 OpenCV 格式,并进行 ArUco 标记的检测
const builtin_interfaces::msg::Time curr_stamp = msg->header.stamp;
cv_bridge::CvImagePtr cv_ptr;
try {
cv_ptr = cv_bridge::toCvCopy(*msg, sensor_msgs::image_encodings::RGB8);
} catch (cv_bridge::Exception & e) {
RCLCPP_ERROR(this->get_logger(), "cv_bridge exception: %s", e.what());
return;
}
cv::Mat in_image = cv_ptr->image;
// 检测结果将存储在 markers 中
std::vector<aruco::Marker> markers;
// ok, let's detect
detector_.detect(in_image, markers, cam_param_, marker_size_, false);
// 每个检测到的标记都会发布位置信息
for (const aruco::Marker & marker : markers) {
const tf2::Transform tf_cam_to_marker = aruco_marker_to_tf2(marker);//位置信息发布为 tf 变换,并绘制在图像中
TransformStamped tf_cam_to_marker_stamped;
tf2::toMsg(tf_cam_to_marker, tf_cam_to_marker_stamped.transform);
tf_cam_to_marker_stamped.header.stamp = curr_stamp;
tf_cam_to_marker_stamped.header.frame_id = msg->header.frame_id;
tf_cam_to_marker_stamped.child_frame_id = "detected_marker_" + std::to_string(marker.id);
tf_broadcaster_->sendTransform(tf_cam_to_marker_stamped);//发布 tf 变换
PoseStamped pose_cam_to_marker;
tf2::toMsg(tf_cam_to_marker, pose_cam_to_marker.pose);//根据 tf 变换计算位置信息
pose_cam_to_marker.header.stamp = curr_stamp;
pose_cam_to_marker.header.frame_id = msg->header.frame_id;
publish_pose_as_base_link(pose_cam_to_marker, std::to_string(marker.id));//发布位置信息
// 画出检测到的标记
marker.draw(in_image, cv::Scalar(0, 0, 255), 2);//在图像中绘制检测到的标记
}
// 画出每个标记的 3D 立方体
if (cam_param_.isValid()) {
for (aruco::Marker & marker : markers) {
aruco::CvDrawingUtils::draw3dAxis(in_image, marker, cam_param_);
}
}
if (image_pub_.getNumSubscribers() > 0) {
// 将处理后的图像发布出去
cv_bridge::CvImage out_msg;
out_msg.header.stamp = curr_stamp;
out_msg.encoding = sensor_msgs::image_encodings::RGB8;
out_msg.image = in_image;
image_pub_.publish(out_msg.toImageMsg());
}
const int detected_tags = static_cast<int>(markers.size());
diagnostic_msgs::msg::DiagnosticStatus diag_status;
// 根据检测到的标记数量发布诊断信息
if (detected_tags > 0) {
diag_status.level = diagnostic_msgs::msg::DiagnosticStatus::OK;
diag_status.message = "AR tags detected. The number of tags: " + std::to_string(detected_tags);
} else {
diag_status.level = diagnostic_msgs::msg::DiagnosticStatus::WARN;
diag_status.message = "No AR tags detected.";
}
diag_status.name = "localization: " + std::string(this->get_name());
diag_status.hardware_id = this->get_name();
diagnostic_msgs::msg::KeyValue key_value;
key_value.key = "Number of Detected AR Tags";
key_value.value = std::to_string(detected_tags);
diag_status.values.push_back(key_value);
DiagnosticArray diag_msg;//发布诊断信息
diag_msg.header.stamp = this->now();
diag_msg.status.push_back(diag_status);
diag_pub_->publish(diag_msg);
}
// wait for one camera info, then shut down that subscriber
/// @brief 当接收到相机信息后,将其转换为OpenCV矩阵并存储
/// @param msg 相机信息
void ArTagBasedLocalizer::cam_info_callback(const CameraInfo & msg)
{
if (cam_info_received_) {
return;
}
//将输入的相机信息 msg 转换成 OpenCV 的矩阵格式
cv::Mat camera_matrix(3, 4, CV_64FC1, 0.0);
camera_matrix.at<double>(0, 0) = msg.p[0];
camera_matrix.at<double>(0, 1) = msg.p[1];
camera_matrix.at<double>(0, 2) = msg.p[2];
camera_matrix.at<double>(0, 3) = msg.p[3];
camera_matrix.at<double>(1, 0) = msg.p[4];
camera_matrix.at<double>(1, 1) = msg.p[5];
camera_matrix.at<double>(1, 2) = msg.p[6];
camera_matrix.at<double>(1, 3) = msg.p[7];
camera_matrix.at<double>(2, 0) = msg.p[8];
camera_matrix.at<double>(2, 1) = msg.p[9];
camera_matrix.at<double>(2, 2) = msg.p[10];
camera_matrix.at<double>(2, 3) = msg.p[11];
cv::Mat distortion_coeff(4, 1, CV_64FC1);
for (int i = 0; i < 4; ++i) {
distortion_coeff.at<double>(i, 0) = 0;
}
const cv::Size size(static_cast<int>(msg.width), static_cast<int>(msg.height));
cam_param_ = aruco::CameraParameters(camera_matrix, distortion_coeff, size);
cam_info_received_ = true;
}
/// @brief 更新最新的扩展卡尔曼滤波器(EKF)姿态估计值
/// @param msg 带协方差的姿态消息
void ArTagBasedLocalizer::ekf_pose_callback(const PoseWithCovarianceStamped & msg)
{
//直接将输入的姿态消息 msg 存储在 latest_ekf_pose_ 变量中
latest_ekf_pose_ = msg;
}
/// @brief 发布基于基准链接的位置信息
/// @param sensor_to_tag 传感器到标签的姿态信息
/// @param tag_id 标签ID
void ArTagBasedLocalizer::publish_pose_as_base_link(
const PoseStamped & sensor_to_tag, const std::string & tag_id)
{
// Check tag_id
if (std::find(target_tag_ids_.begin(), target_tag_ids_.end(), tag_id) == target_tag_ids_.end()) {//检查是否在目标标签ID中
RCLCPP_INFO_STREAM(this->get_logger(), "tag_id(" << tag_id << ") is not in target_tag_ids");
return;
}
if (landmark_map_.count(tag_id) == 0) {//检查是否已经接收到地图信息
RCLCPP_INFO_STREAM(this->get_logger(), "tag_id(" << tag_id << ") is not in landmark_map_");
return;
}
// Range filter
const double distance_squared = sensor_to_tag.pose.position.x * sensor_to_tag.pose.position.x +
sensor_to_tag.pose.position.y * sensor_to_tag.pose.position.y +
sensor_to_tag.pose.position.z * sensor_to_tag.pose.position.z;
if (distance_threshold_squared_ < distance_squared) {//检查是否超出距离阈值
return;
}
// Transform to base_link
PoseStamped base_link_to_tag;
try {
const TransformStamped transform =
tf_buffer_->lookupTransform("base_link", sensor_to_tag.header.frame_id, tf2::TimePointZero);
tf2::doTransform(sensor_to_tag, base_link_to_tag, transform);//将传感器到标签的姿态信息转换为基准链接到标签的姿态信息
base_link_to_tag.header.frame_id = "base_link";
} catch (tf2::TransformException & ex) {
RCLCPP_INFO(this->get_logger(), "Could not transform base_link to camera: %s", ex.what());
return;
}
// (1) map_to_tag
const Pose & map_to_tag = landmark_map_.at(tag_id);
const Eigen::Affine3d map_to_tag_affine = pose_to_affine3d(map_to_tag);
// (2) tag_to_base_link
const Eigen::Affine3d base_link_to_tag_affine = pose_to_affine3d(base_link_to_tag.pose);
const Eigen::Affine3d tag_to_base_link_affine = base_link_to_tag_affine.inverse();
// calculate map_to_base_link
// 计算地图到基准链接的姿态变换
const Eigen::Affine3d map_to_base_link_affine = map_to_tag_affine * tag_to_base_link_affine;
const Pose map_to_base_link = tf2::toMsg(map_to_base_link_affine);
// 如果当前姿态与最新的 EKF 姿态估计值的差异超过 ekf_time_tolerance_,则不会发布
const rclcpp::Duration diff_time =
rclcpp::Time(sensor_to_tag.header.stamp) - rclcpp::Time(latest_ekf_pose_.header.stamp);
if (diff_time.seconds() > ekf_time_tolerance_) {//计算地图到基准链接的姿态变换,并进行时间戳和姿态差异的检查
RCLCPP_INFO(
this->get_logger(),
"latest_ekf_pose_ is older than %f seconds compared to current frame. "
"latest_ekf_pose_.header.stamp: %d.%d, sensor_to_tag.header.stamp: %d.%d",
ekf_time_tolerance_, latest_ekf_pose_.header.stamp.sec, latest_ekf_pose_.header.stamp.nanosec,
sensor_to_tag.header.stamp.sec, sensor_to_tag.header.stamp.nanosec);
return;
}
// 如果当前姿态与最新的 EKF 姿态估计值的差异超过 ekf_position_tolerance_,则不会发布
const Pose curr_pose = map_to_base_link;
const Pose latest_ekf_pose = latest_ekf_pose_.pose.pose;
const double diff_position = norm(curr_pose.position, latest_ekf_pose.position);
if (diff_position > ekf_position_tolerance_) {
RCLCPP_INFO(
this->get_logger(),
"curr_pose differs from latest_ekf_pose_ by more than %f m. "
"curr_pose: (%f, %f, %f), latest_ekf_pose: (%f, %f, %f)",
ekf_position_tolerance_, curr_pose.position.x, curr_pose.position.y, curr_pose.position.z,
latest_ekf_pose.position.x, latest_ekf_pose.position.y, latest_ekf_pose.position.z);
return;
}
// Construct output message
PoseWithCovarianceStamped pose_with_covariance_stamped;
pose_with_covariance_stamped.header.stamp = sensor_to_tag.header.stamp;
pose_with_covariance_stamped.header.frame_id = "map";
pose_with_covariance_stamped.pose.pose = curr_pose;
// ~5[m]: base_covariance
// 5~[m]: scaling base_covariance by std::pow(distance/5, 3)
//构造输出消息,并根据距离调整协方差
const double distance = std::sqrt(distance_squared);
const double scale = distance / 5;
const double coeff = std::max(1.0, std::pow(scale, 3));
for (int i = 0; i < 36; i++) {
pose_with_covariance_stamped.pose.covariance[i] = coeff * base_covariance_[i];
}
pose_pub_->publish(pose_with_covariance_stamped);
}
/// @brief 将 ArUco 标记转换为 tf 变换
/// @param marker ArUco 标记
/// @return
tf2::Transform ArTagBasedLocalizer::aruco_marker_to_tf2(const aruco::Marker & marker)
{
cv::Mat rot(3, 3, CV_64FC1);//存储标记的旋转矩阵
cv::Mat r_vec64;
marker.Rvec.convertTo(r_vec64, CV_64FC1);//将其转换为 CV_64FC1(即双精度浮点数)类型的 r_vec64
cv::Rodrigues(r_vec64, rot);
cv::Mat tran64;//存储标记的平移矩阵
marker.Tvec.convertTo(tran64, CV_64FC1);
tf2::Matrix3x3 tf_rot(
rot.at<double>(0, 0), rot.at<double>(0, 1), rot.at<double>(0, 2), rot.at<double>(1, 0),
rot.at<double>(1, 1), rot.at<double>(1, 2), rot.at<double>(2, 0), rot.at<double>(2, 1),
rot.at<double>(2, 2));
tf2::Vector3 tf_orig(tran64.at<double>(0, 0), tran64.at<double>(1, 0), tran64.at<double>(2, 0));
return tf2::Transform(tf_rot, tf_orig);
}
1.2 landmark管理
landmark_manager是一个实用程序包,用于从地图中加载地标。
- 转换:地标的中心是四个顶点的中心
- 旋转:让顶点编号为1、2、3、4,按逆时针方向如下一节所示。方向定义为从1到2的向量和从2到3的向量的叉积。
用户可以将地标定义为Lanelet2的4个顶点多边形。在这种情况下,可能定义一种排列,其中四个顶点不能被认为在同一平面上。在这种情况下,地标的方向很难计算。因此,如果将4个顶点视为构成一个四面体,并且其体积超过volume_threshold参数,则地标将不会发布tf_static
这个文件中包含了两个函数:parse_landmarks和convert_landmarks_to_marker_array_msg。这两个函数用于处理地图数据中特定类型和子类型的地标信息,并将其转换为自定义的Landmark结构体,同时将Landmark结构体的地标信息转换为可视化消息。
在parse_landmarks函数中,首先使用日志记录器输出地图数据的基本信息,然后将地图数据转换为lanelet_map_ptr。接着遍历lanelet_map_ptr中的多边形图层,提取类型为"pose_marker"且子类型为目标子类型的地标信息。对于每个符合条件的多边形,计算其体积、中心点、坐标轴、旋转矩阵和四元数,并将这些信息存储在Landmark结构体中,最终返回包含Landmark结构体的向量。
在convert_landmarks_to_marker_array_msg函数中,将Landmark结构体的地标信息转换为可视化消息。根据每个地标信息创建立方体标记和文本标记,并将它们添加到标记数组中,最终返回包含标记数组的可视化消息。