CARIS处理多波束的时候,一般首先要建立船型文件,采集的设备或软件不同,其船型文件也不同,其中最关键就是采集设备和软件的坐标系统。
为了使用方便,不用费力地去查对应的使用手册,现将常用多波束设备和软件的坐标系统汇总如下:
1、CARIS软件的坐标系统
CARIS的说明书关于坐标系统的定义如下:
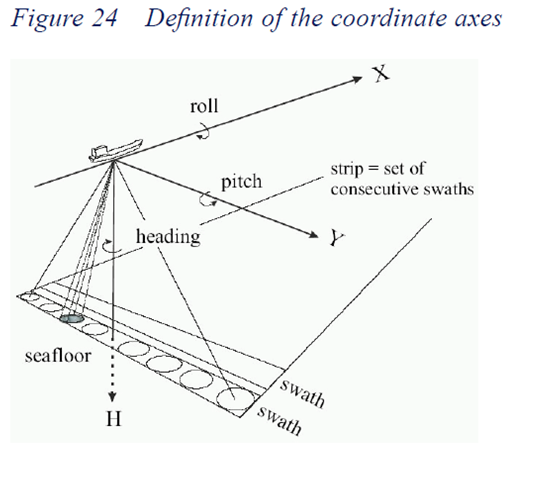
The axes are defined as follows:
•The Y-axis is oriented along the vessel’s fore/aft axis, positive forward.
•The X-axis is oriented along the vessel’s port/starboard axis, perpendicular to the Y-axis, positive to the starboard.
•The Z-axis is perpendicular to the X-Y plane, and positive into the water.
简单地说就是,X轴:左右舷,向右为正;Y轴:前后,向前为正;Z轴:上下,向下为正。
2、Kongsberg采集软件SIS的坐标系统
从SIS软件的帮助,可以知道SIS的坐标系统如下:
从图中可以看出,X轴:前后,向前为正;Y轴:左右舷,向右为正;Z轴:上下,向下为正。
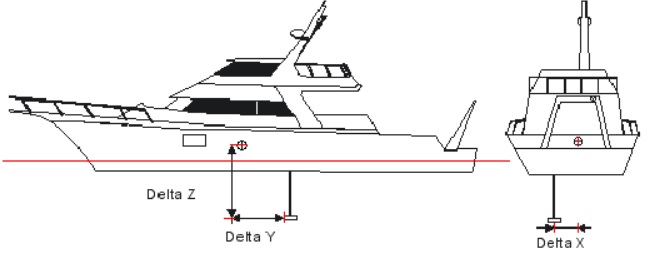
3、PDS采集软件
X轴:左右舷,向右为正;Y轴:前后,向前为正;Z轴:上下,向上为正。
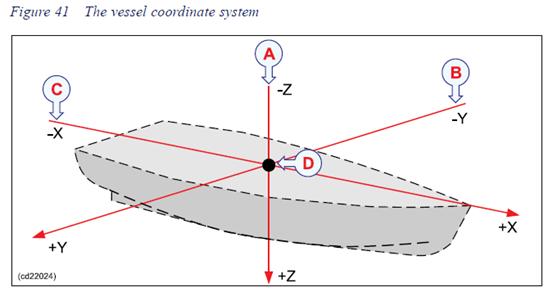
4、POSMV姿态传感器
X轴:前后,向前为正;Y轴:左右舷,向右为正;Z轴:上下,向下为正。
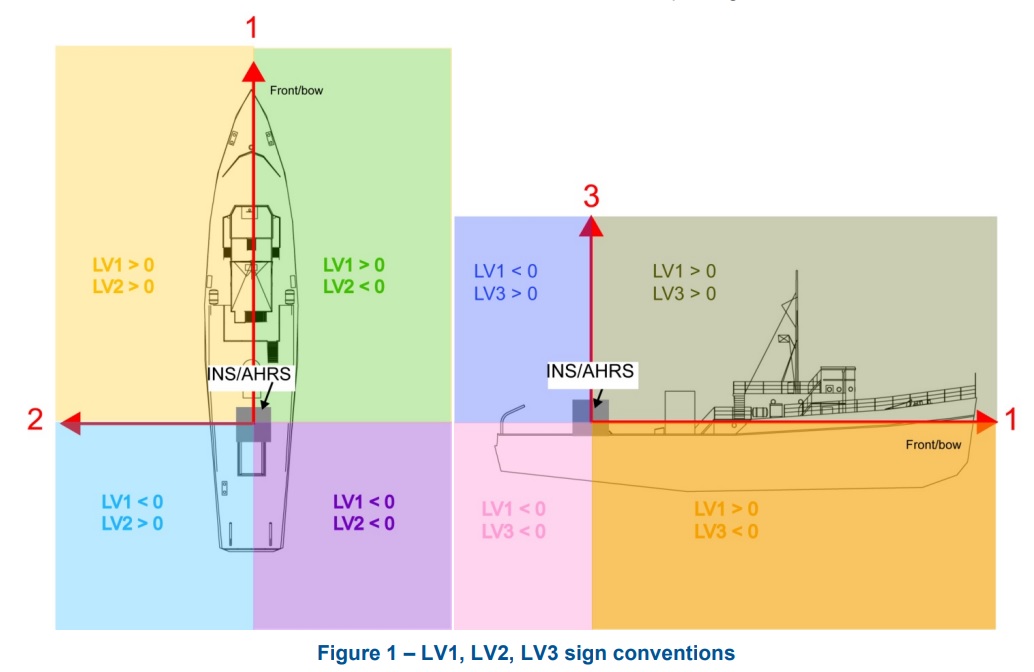
5、Hydrins姿态传感器
坐标系统没有采用传统X、Y、Z轴表示,而采用1,2,3方向,1:前后,向前为正,2:左右舷,向左为正,3:上下,向上为正。
6、旋转角
从坐标轴前面向后看,逆时针为正;例如,从X轴前向后看,逆时针为正,就是左舷上翘为正值,从Y轴前向后看,就是前翘为正值,从下往上看,偏右为正。
这样就可以根据校准值的方向,确定校准值的正负号。