随着智能汽车技术与供应链的发展,可以看到很多高端汽车也逐渐开始采用过去在L4上才使用的传感器,例如激光雷达。同时,多传感器融合技术也已进入规模化量产阶段,为L2+在乘用车上的大规模应用打开了一个新窗口。
而作为L4领域的资深玩家,小马智行凭借多年的技术积累,“降维”发力L2,则可以快速实现商业化落地,增强自身造血能力,在接下来的突围赛中抢占先发优势。
1月11日,小马智行正式宣布乘用车智能驾驶业务产品线——智驾软件品牌“小马识途”、域控制器“方载”以及数据闭环工具链“苍穹”三大产品线,并已成立独立事业部(Personally Owned Vehicles,简称POV)运营该业务。

这一业务始于2020年起小马智行对前装量产领域的投入,在独立事业部的运营下,小马智行将为市场提供高性能、高性价比的智能驾驶软硬件解决方案。目前该业务板块三条产品线均取得定点,并已开始量产交付。
于此,小马智行形成了自动驾驶出行服务(Robotaxi)、自动驾驶货运服务(Robotruck)以及乘用车智能驾驶业务(POV)三大技术前台业务板块。随着终端用户对智能驾驶体验的需求快速增加,要求越来越高,POV业务将成为小马智行未来发展的核心驱动力之一。
两年前,小马智行就已意识到:很多L4的核心技术可以逐步复用到乘用车的智能驾驶产品中,并逐渐放量。“POV 经过两年多的发展,从整个业绩来看,这个趋势与我们当时的判断是非常类似的。我们也欣喜地看到,通过公司的发展和努力,产品也获得了OEM的定点,使我们核心技术迁移应用到乘用车上。”小马智行COO、上海研发中心负责人王皓俊表示。
可落地的智能驾驶解决方案
可以说,在下一轮智能驾驶竞赛中,小马智行早已夯实了基本功。
在过去几年的日常中,小马智行一直在做的事情就是在北上广深等城区、高速等复杂场景中不断积累数据,打磨算法。
截至目前,其L4自动驾驶里程数已达到近2000万公里,建立起了足够丰富的场景库以及解决各类corner case的方案。
同时,小马智行自2020年开始布局前装智驾软件,经过不断打磨,现正式推出“小马识途”解决方案。该方案基于小马智行多年来在自动驾驶算法领域所积累的多项技术突破:
其自研BEV(Bird’s Eye View)感知算法,大模型识别各类型障碍物、车道线及可通行区域等信息,最大限度降低算力需求,同时在无高精地图的情况下,仅用导航地图也可实现高速与城市NOA功能——这是小马真正“识途”的关键能力之一。
要知道,高精度地图如果像导航地图一样在量产车上大规模使用,于消费者和车企而言,首先需要考虑的便是一笔支出或开销,相当于除了导航地图以外,消费者每个月还要承担高精度地图这一份成本。
当然,车企也非常关心,如果没有高精度地图只有导航地图的情况下,当前的技术到底能做到什么程度?
事实上,小马早已探索出了一条“去高精地图”的可行性路线。“我们的自动驾驶物流车队和Robotaxi中已经比较多地应用了这样的技术,继而可以哺育到我们POV的方案。其实在一些复杂的路口,高精地图能够给到的帮助非常有限。更重要的应该是区分哪里是可驾驶区域。”王皓俊表示。
简单理解,就车道线本身而言,系统直接在线进行车道线识别,就已经能达到足够的理解程度或准确度。这其中,语义理解才是达到精准识别效果的关键,而非高精地图。另一方面,对于OEM来说,这项成本的节省是非常具有吸引力的。
此外,在高速场景中,小马智行可极致地利用传感器,用鱼眼相机参与行车BEV感知模型,减少对传感器数量的依赖——使用低至6个摄像头(4个鱼眼相机及前后向各1个长距相机)与1个前向毫米波雷达,打造出极致性价比的行泊一体方案,实现高速NOA、记忆泊车、主动安全等功能,并可适配多种芯片。
值得一提的是,小马智行基于对复杂场景处理的多年积累,首创博弈交互式规划算法,考虑自车与社会车辆的博弈,使L4车辆已在北京、广州的繁忙城区实现全无人自动驾驶的规模运营。
这套算法赋予小马识途智驾解决方案“老司机”般顺滑的驾乘体验——高速NOA在传感器数量大幅精简的情况下,可实现在繁忙的城市高架路与匝道上灵活穿梭,人为接管指标数倍优于业界主流产品;城市NOA体验则接近L4 Robotaxi。在更高性价比的方案下,小马识途实现了安全、舒适、通行效率三者兼备的行车体验。
在传统的开发模式中,若干功能往往被独立开发、再被整合。而小马智行颠覆式地首创“全场景ACC”、“全场景LCC”和“全场景NOA”,无论有无高精地图,无论在城区、高速行车还是泊车,不同功能中职责相同部分均使用同一套博弈交互式规划算法,体验一致。
比如ACC功能中用到的纵向规控、社会车辆切入预测算法与LCC、NOA相同,均可顺滑处理加塞车辆,实现“零踏板”驾驶;LCC的横向规控算法与NOA相同,均可避让隔壁大车、绕行施工与违停车辆。
LCC的拨杆变道与NOA的自主变道使用同一套变道算法,具备在密集车流间出色的变道能力;泊车场景与城区行车场景均使用同一套窄路会车算法提升通行效率,也均可安全舒适地避让横穿行人。
“体验割裂感对于很多用户而言一直都是一困扰。虽然一些方案具备泊车和行车功能,但是到了高速和一些更复杂的城市场景中,整个体验的割裂感就会导致于很多用户觉得不舒服,不愿意使用这些高级功能。只有在舒适度上下功夫,才能让用户感知到技术价值的关键所在。”王皓俊表示。
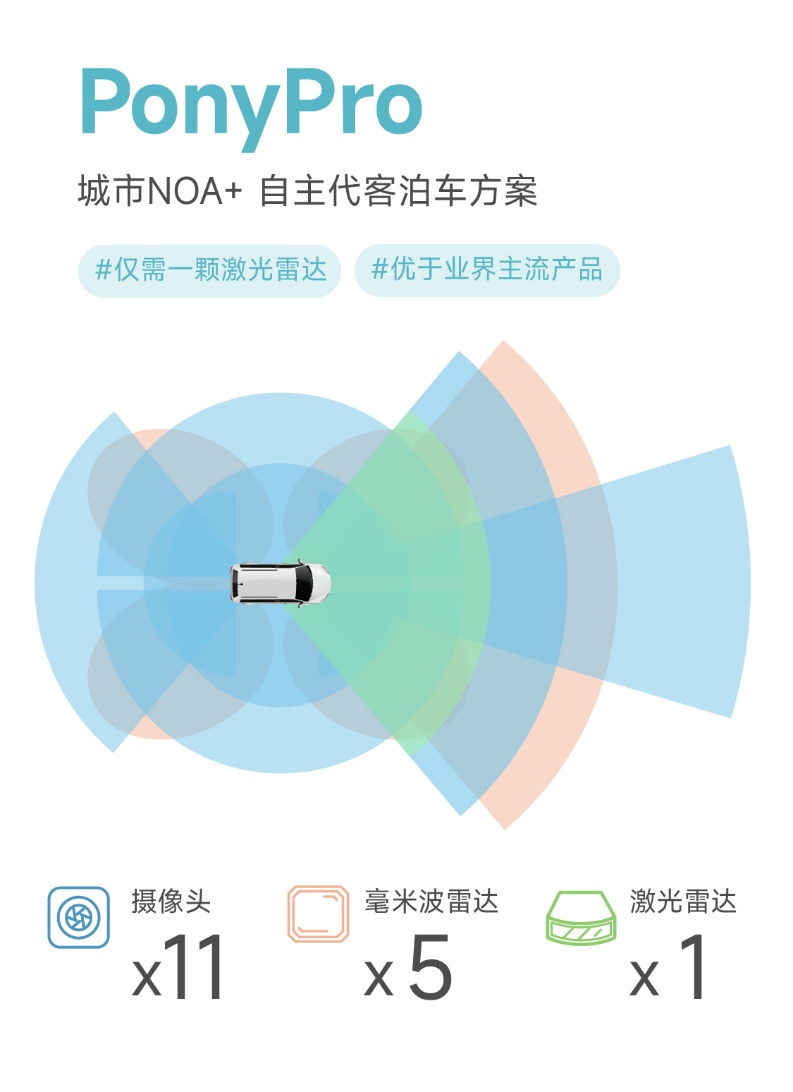
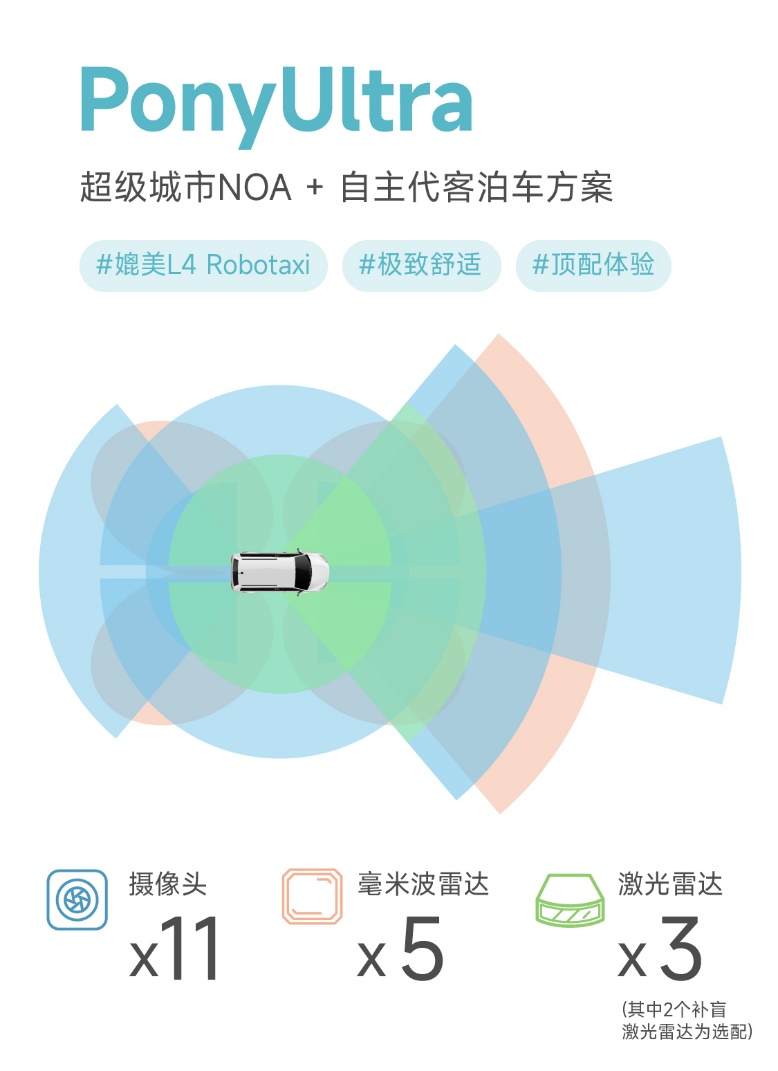
目前,小马识途基于不同传感器和算力配置,推出三款系统级方案:PonyClassic,PonyPro以及PonyUltra,提供差异化的参考硬件配置,也可根据客户需求量身定制整体方案。
PonyClassic:全套智驾硬件成本数千元,超高性价比,传感器数量极致精简,压榨硬件性能,实现高速NOA、记忆泊车与主动安全功能。
芯片:算力50-100TOPS,支持地平线征程5、英伟达Orin或类似算力芯片平台。

PonyPro:加装一颗激光雷达,实现城市NOA与自主代客泊车功能。
芯片:算力约200TOPS,支持单颗英伟达OrinX、两颗地平线征程5或类似算力芯片平台。
PonyUltra:极致智能体验的顶配方案,城市NOA可实现媲美小马智行的L4 Robotaxi体验。
芯片:算力约500TOPS,支持两颗英伟达OrinX、地平线征程6或类似算力芯片平台。
最适合自动驾驶的车规级域控
事实上,一套自动驾驶系统要想达到最佳性能和最高性价比,离不开软硬件的互相结合。供应商对于硬件的理解,不仅可以助力其在软件方面做出更好的优化。而且可以为公司带来更大的影响力。
“应对自动驾驶不同的场景需要更多的算力,更需要懂得软硬结合来加强对传感器的应用以及对规控算法的打磨。”王皓俊表示。
在多数自动驾驶公司将精力投入软件研发时,小马智行早已开始自研硬件。
其推出了优质、高性价比的智能驾驶硬件模块——自研的域控制器“方载”,目前已开始量产交付,定点客户包括车企。小马智行还积极探索“方载”在低速无人驾驶领域的应用,满足客户对计算平台车规化的需求,解决核心硬件成本高的痛点,赋能无人配送、环卫、港口和矿区等应用场景。
目前,小马智行已推出行业内首批采用DRIVE Orin芯片不同配置的域控制器,包含单OrinX芯片与双OrinX芯片,经过一年多在中国多地的道路测试,方载系列产品的硬件性能已磨合到最优状态。
 单DRIVE Orin 版方载域控制器
单DRIVE Orin 版方载域控制器

双 DRIVE Orin 版方载域控制器
除了OrinX,小马智行正积极布局适配其他芯片及域控平台,与多家产业链企业深入合作,赋能未来自动驾驶车辆的大规模部署。
经历过多轮高性能计算平台迭代及软硬件系统优化,小马智行已充分了解自动驾驶的需求,深谙自动驾驶控制器设计及软件适配的诉求,并将此经验倾注于域控制器的研发中。
方载从性能、安全、成本、可靠性等方面,都更适合智能驾驶应用场景,更好地匹配上层软件算法,整体运行效率大幅提高。目前,小马智行域控制器已经通过汽车功能安全ASIL-D开发流程认证与国际质量体系认证,全方位满足车规级域控的标准。
“其实域控领域还有一个比较重要的是底软,我们的底软目前的占比以及复杂程度是比较高的。在和客户的交流过程中,我们其实也感受到客户非常希望能够有一个厂商能够从底软到硬件,EE,ME到外罩都有能力覆盖。这方面小马智行其实有非常大的优势。”小马智行上海研发中心副总经理、产品商业化负责人黄俊表示。
“苍穹”:解决数据爆炸问题,精准评测智驾系统的工具链
目前,L2+级ADAS市场渗透率已经来到了跨越鸿沟的临界点,而小马智行多年以来在L4级自动驾驶领域已积累的大量数据,完全可成为其反哺高阶智能驾驶系统,冲刺决赛圈的重要基础。
而无论是做好自动驾驶还是智能驾驶,其本质都是对数据闭环的有效运营。玩家们只有通过行驶中的车辆搭载的传感器不断回收真实的驾驶场景数据,才能够反哺智能驾驶技术和算法的迭代升级。
依托内部开发过程中打磨出的成熟的工具链体系,小马智行推出了数据闭环工具链产品“苍穹”,帮助客户充分挖掘数据价值,快速提升智驾系统能力。
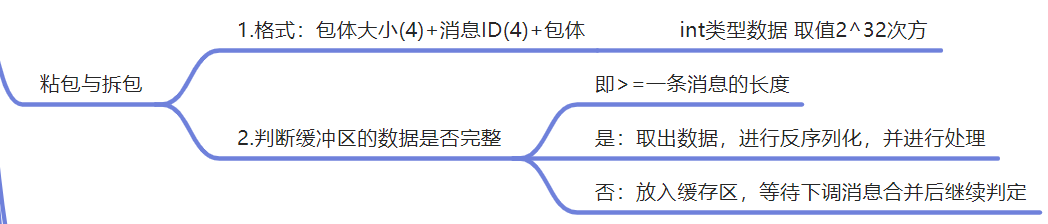
苍穹数据闭环工具链由两大核心模块协同组成,分别是车云协同大数据平台与云端大规模仿真平台,配合灵活接入的数据标注工具与模型训练工具,实现对两类客户核心需求的全覆盖——研发测试阶段的全量数据闭环以及量产阶段基于影子模式的数据闭环。
小马智行已支持苍穹工具链以模块化、可插拔的方式为用户提供软件产品及服务,并已服务多家车企以支持智驾软件的快速迭代。

一图了解苍穹数据闭环工具链
苍穹产品中的车云协同大数据平台能够高效地解决当前智驾系统研发普遍面临的数据爆炸问题。通过车端及云端的协同机制,该平台可精准挖掘高价值数据,提供数据分析套件,实现一站式的数据利用功能,并基于深度优化的数据管理系统,帮助客户在有限成本下高效地完成数据采集、存储和挖掘。
苍穹产品中的云端大规模仿真平台是智驾系统快速迭代的引擎,支持快捷精准的多维度指标评测,覆盖安全性、合规性、舒适度及通行效率等多方面。该平台基于行为完美一致的仿真引擎和Smart Agent技术,最大程度保障了仿真结果的可信度;配合云端大规模任务调度的能力,苍穹的仿真测试可做到日行千万公里,低成本地实现对软件变更的效果评测,保障系统能力持续提升。
该工具链是小马智行六年间积累的一整套以数据驱动的自动驾驶系统研发模式与方法论的产品化表现,更是小马智行取得诸多技术里程碑的“背后功臣”,该产品的先进和优越性将助力更多智能驾驶研发团队,赋能汽车产业智能化大潮猛进。
在POV事业部的加持下,小马智行将持续为市场提供高性能、高性价比的全链路智能驾驶产品。POV业务作为小马智行的前台业务板块之一,将成为小马智行“虚拟司机”能力的又一重要延伸。
关于小马智行
小马智行(Pony.ai)成立于2016年底,致力于提供安全、先进、可靠的全栈式自动驾驶技术,实现未来交通方式的彻底变革。我们以中国和美国为起点,分别在硅谷、北京、上海、广州、深圳设立研发中心。
小马智行的技术目标是打造适用于各类车型及应用场景的“虚拟司机”(Virtual Driver),同时布局自动驾驶出行服务(Robotaxi)、自动驾驶卡车(Robotruck)及乘用车智能辅助驾驶领域。
凭借人工智能技术领域的最新突破,小马智行已与丰田、三一、上汽、一汽、广汽、吉利等一流车厂以及英伟达、中国外运、四维图新、如祺出行等上下游头部企业建立合作,并成为全球首家在中美均推出自动驾驶出行服务的公司。截至2022年3月,公司估值达85亿美元,是全球最有价值的自动驾驶公司之一。