文章目录
前言
1 常见的抓手参数
2 参数说明
前言
Copter 支持许多不同的抓取器,这对送货应用和落瓶很有用。
按照下面的链接(或侧边栏),根据你的设置了解配置信息。
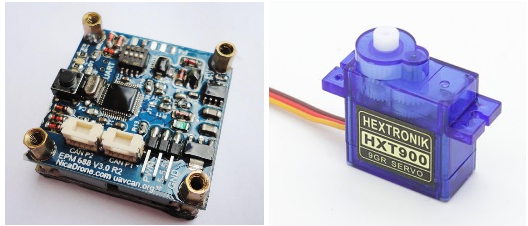
- Electro Permanent Magnet v3 (EPMv3)
- Electro Permanent Magnet v1 (EPM688)
- Servo Gripper
!Tip
可以使用 FS_OPTIONS(仅 ArduCopter)配置抓手,以便在失控保护情况下释放。
1 常见的抓手参数
- GRIP_ENABLE:启用抓取器的使用,并显示以下参数;
- GRIP_TYPE:抓取器类型 – 0:无(在没有隐藏参数的情况下禁用),1:伺服,2:EMP;
- GRIP_AUTOCLOSE:释放后重新抓取有效载荷的时间(秒)(0 禁用)。用于送货后的有效载荷更换;
- GRIP_GRAB:以 uS 为单位的 PWM 来抓取有效载荷;
- GRIP_NEUTRAL:以 uS 为单位的 PWM,既不抓取也不释放有效载荷;
- GRIP_RELEASE:以 uS 为单位的 PWM 来释放有效载荷;
- GRIP_REGRAB:(仅适用于 EMP)重新装载的时间间隔,以秒为单位(0 禁用),以确保电磁保持没有衰变;
- GRIP_CAN_ID:(仅限EMP) 参考https://docs.zubax.com/opengrab_epm_v3#UAVCAN_interface
通过设置 SERVOx_FUNCTION = "28"(Gripper),可以选择与抓取器相连的自动驾驶仪输出通道。
通过使用 MAVLink 命令MAV_CMD_DO_GRIPPER或将 RC 通道开关配置为 RCx_OPTION = "19(Gripper) "来控制夹持器。
2 参数说明
1. GRIP_NEUTRAL:空档 PWM
注意:此参数适用于高级用户。
未抓取或释放时发送到抓取器的 PWM 值(以微秒为单位)。
| Range | Units |
|---|---|
| 1000 to 2000 | PWM in microseconds |
2. GRIP_REGRAB:EPM 夹具 Regrab 间隔
注意:此参数适用于高级用户。
EPM 夹具重新抓取货物以确保夹具没有减弱的时间(以秒为单位);0 要禁用。
| Range | Units |
|---|---|
| 0 to 255 | seconds |
3. MAV_CMD_DO_GRIPPER
支持单位:Copter (not Plane or Rover)。
操作 EPM 夹具的任务命令。
将 Copter 与夹持器集成的说明已过期,请使用 DO_SET_SERVO 激活夹持器(2015年4月)。
命令参数:
| Command Field | Mission Planner Field | Description |
|---|---|---|
| param1 | Gripper No | Gripper number (from 1 to maximum number of grippers on the vehicle). |
| param2 | drop(0)/grab(1) | Gripper action: 0:Release 1:Grab |
| param3 | Empty | |
| param4 | Empty | |
| param5 | Empty | |
| param6 | Empty | |
| param7 | Empty |









![C语言学习笔记[22]:分支语句switch](https://i-blog.csdnimg.cn/direct/b38eadadd2d34a45b1c1b375c8a9fd8e.png)