1、加载一张原图,并识别人脸的68个特征点
cv::Mat img = cv::imread("5.jpg");
// 人脸68特征点的识别函数
vector<Point2f> points_vec = dectectFace68(img);
// 大眼效果函数
Mat dst0 = on_BigEye(800, img, points_vec);

2、函数
vector<Point2f> dectectFace68(Mat src)
{
vector<Point2f> points_vec;
int* pResults = NULL;
//在检测函数中使用了pBuffer。
//如果你调用多个线程中的函数,请为每个线程创建一个缓冲区!
unsigned char* pBuffer = (unsigned char*)malloc(DETECT_BUFFER_SIZE);
if (!pBuffer)
{
fprintf(stderr, "Can not alloc buffer.\n");
//return 100;
}
Mat gray;
cvtColor(src, gray, CV_BGR2GRAY);
int doLandmark = 1;// do landmark detection
pResults = facedetect_multiview_reinforce(pBuffer, (unsigned char*)(gray.ptr(0)), gray.cols, gray.rows, (int)gray.step,
1.2f, 2, 48, 0, doLandmark);
int cxa = *pResults;
ofstream file("facedata.txt", ios::out);
//打印检测结果
if (0 == cxa)
{
}
else
{
for (int i = 0; i < (pResults ? *pResults : 0); i++)
{
short* p = ((short*)(pResults + 1)) + 142 * i;
//rectangle(src, Rect(p[0], p[1], p[2], p[3]), Scalar(0, 255, 0), 2);
if (doLandmark)
{
for (int j = 0; j < 68; j++)
{
char c[8];
_itoa(j, c, 10);
Point2f ff(p[6 + 2 * j], p[6 + 2 * j + 1]);
points_vec.push_back(ff);
file << ff.x << "\t" << ff.y << endl;
/* circle(src, Point((int)p[6 + 2 * j], (int)p[6 + 2 * j + 1]), 3, Scalar(0, 0, 255), 3);
CvPoint font;
putText(src, c, Point((int)p[6 + 2 * j], (int)p[6 + 2 * j + 1]), FONT_HERSHEY_SIMPLEX, 0.5, Scalar(255, 23, 0), 1);*/
}
}
}
}
return points_vec;
}
// 双线性插值算法
void BilinearInsert(Mat& src, Mat& dst, float ux, float uy, int i, int j)
{
auto Abs = [&](float f) {
return f > 0 ? f : -f;
};
int c = src.channels();
if (c == 3)
{
//存储图像得浮点坐标
CvPoint2D32f uv;
CvPoint3D32f f1;
CvPoint3D32f f2;
//取整数
int iu = (int)ux;
int iv = (int)uy;
uv.x = iu + 1;
uv.y = iv + 1;
//step图象像素行的实际宽度 三个通道进行计算(0 , 1 2 三通道)
f1.x = ((uchar*)(src.data + src.step * iv))[iu * 3] * (1 - Abs(uv.x - iu)) + \
((uchar*)(src.data + src.step * iv))[(iu + 1) * 3] * (uv.x - iu);
f1.y = ((uchar*)(src.data + src.step * iv))[iu * 3 + 1] * (1 - Abs(uv.x - iu)) + \
((uchar*)(src.data + src.step * iv))[(iu + 1) * 3 + 1] * (uv.x - iu);
f1.z = ((uchar*)(src.data + src.step * iv))[iu * 3 + 2] * (1 - Abs(uv.x - iu)) + \
((uchar*)(src.data + src.step * iv))[(iu + 1) * 3 + 2] * (uv.x - iu);
f2.x = ((uchar*)(src.data + src.step * (iv + 1)))[iu * 3] * (1 - Abs(uv.x - iu)) + \
((uchar*)(src.data + src.step * (iv + 1)))[(iu + 1) * 3] * (uv.x - iu);
f2.y = ((uchar*)(src.data + src.step * (iv + 1)))[iu * 3 + 1] * (1 - Abs(uv.x - iu)) + \
((uchar*)(src.data + src.step * (iv + 1)))[(iu + 1) * 3 + 1] * (uv.x - iu);
f2.z = ((uchar*)(src.data + src.step * (iv + 1)))[iu * 3 + 2] * (1 - Abs(uv.x - iu)) + \
((uchar*)(src.data + src.step * (iv + 1)))[(iu + 1) * 3 + 2] * (uv.x - iu);
((uchar*)(dst.data + dst.step * j))[i * 3] = f1.x * (1 - Abs(uv.y - iv)) + f2.x * (Abs(uv.y - iv)); //三个通道进行赋值
((uchar*)(dst.data + dst.step * j))[i * 3 + 1] = f1.y * (1 - Abs(uv.y - iv)) + f2.y * (Abs(uv.y - iv));
((uchar*)(dst.data + dst.step * j))[i * 3 + 2] = f1.z * (1 - Abs(uv.y - iv)) + f2.z * (Abs(uv.y - iv));
}
}
//图像局部缩放算法
void LocalTranslationWarp_Eye(Mat& img, Mat& dst, int warpX, int warpY, int endX, int endY, float radius)
{
//平移距离
float ddradius = radius * radius;
//计算|m-c|^2
//size_t mc = (endX - warpX) * (endX - warpX) + (endY - warpY) * (endY - warpY);
//计算 图像的高 宽 通道数量
int height = img.rows;
int width = img.cols;
int chan = img.channels();
auto Abs = [&](float f)
{
return f > 0 ? f : -f;
};
for (int i = 0; i < width; i++)
{
for (int j = 0; j < height; j++)
{
// # 计算该点是否在形变圆的范围之内
//# 优化,第一步,直接判断是会在(startX, startY)的矩阵框中
if ((Abs(i - warpX) > radius) && (Abs(j - warpY) > radius))
continue;
float distance = (i - warpX) * (i - warpX) + (j - warpY) * (j - warpY);
if (distance < ddradius)
{
float rnorm = sqrt(distance) / radius;
float ratio = 1 - (rnorm - 1) * (rnorm - 1) * 0.5;
//映射原位置
float UX = warpX + ratio * (i - warpX);
float UY = warpY + ratio * (j - warpY);
//根据双线性插值得到UX UY的值
BilinearInsert(img, dst, UX, UY, i, j);
}
}
}
}
//大眼效果
Mat on_BigEye(int b, Mat src, vector<Point2f> points_vec)
{
Mat dst = src.clone();
Point2f left_landmark = points_vec[38];
Point2f left_landmark_down = points_vec[27];
Point2f right_landmark = points_vec[44];
Point2f right_landmark_down = points_vec[27];
Point2f endPt = points_vec[30];
//# 计算第4个点到第6个点的距离作为距离
/*float r_left = sqrt(
(left_landmark.x - left_landmark_down.x) * (left_landmark.x - left_landmark_down.x) +
(left_landmark.y - left_landmark_down.y) * (left_landmark.y - left_landmark_down.y));
cout << "左眼距离:" << r_left;*/
float r_left = b;
// # 计算第14个点到第16个点的距离作为距离
//float r_right = sqrt(
// (right_landmark.x - right_landmark_down.x) * (right_landmark.x - right_landmark_down.x) +
// (right_landmark.y - right_landmark_down.y) * (right_landmark.y - right_landmark_down.y));
//cout << "右眼距离:" << r_right;
float r_right = b;
// # 瘦左
//LocalTranslationWarp_Eye(src, dst, left_landmark.x, left_landmark.y, endPt.x, endPt.y, r_left);
// # 瘦右
LocalTranslationWarp_Eye(src, dst, right_landmark.x, right_landmark.y, endPt.x, endPt.y, r_right);
return dst;
}
3、图像结果
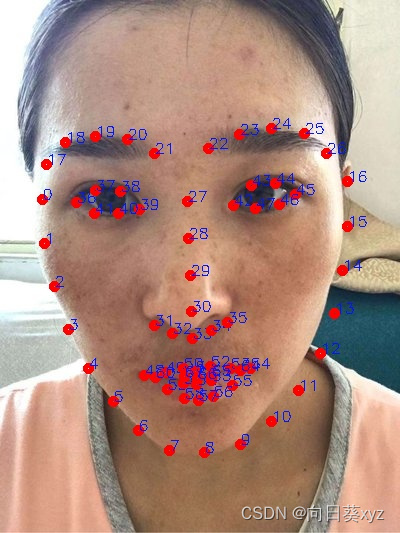
大眼睛结果