文章目录
- 需求
- 一、KQM6600模块及接线方法
- 二、模块配置流程
- 1.环境
- 2.配置时钟和IO
- 3.配置串口初始化,使能以及中断
- 4.中断函数
- 三、数据处理
- 四、关键代码
- 总结
需求
能够在串口实时显示当前的VOC(挥发性有机化合物),甲醛和Co2浓度。

一、KQM6600模块及接线方法
KQM6600TAUs型空气质量检测模块,使用MEMS VOC传感器件作为检测空气中有机化合物气体(VOC)的模块。UART通信数据输出,根据VOC数据计算和等效甲醛,CO2输出。其具有体积小,功耗低,灵敏度高,响应速度快等居多优点,广泛应用在空气质量检
测及控制领域。
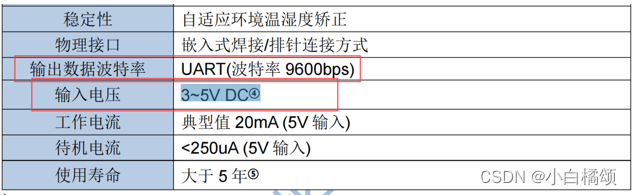
要注意该模块的电压和波特率。
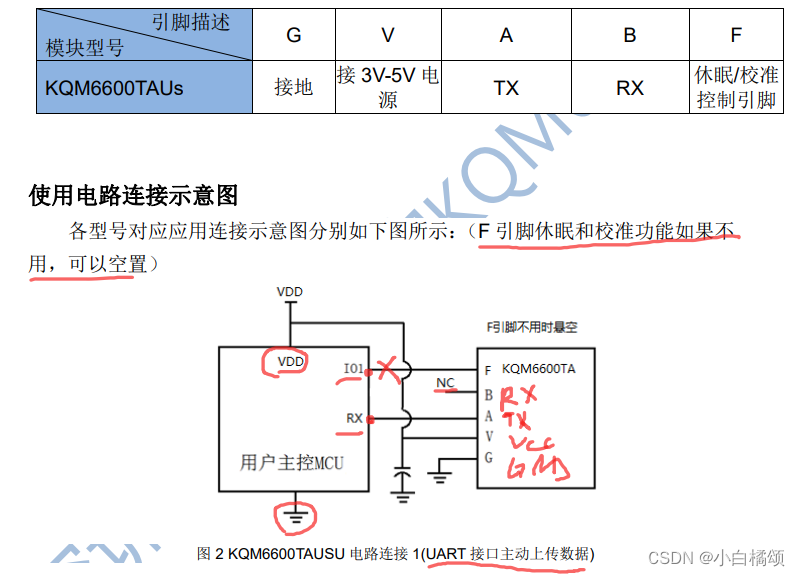
由官方的说明书可知,只需在将该模块的(V)供电,(A)TX和(G)GND三个引脚接到板子上即可。

本次例程由于没有使用SD卡模块,所以选择将KQM6600模块的数据传输到UART4上,只需将该模块的A(TX)接到PC11即可。
二、模块配置流程
1.环境
1.首先要保证串口1能够将接收到的实时数据发送到串口上。
2.还要对printf进行重定向,让其能够打印到串口上。(详情见STM32第三课:串口调试)
代码如下:
usart.c
#include "usart.h"
#include "stdio.h"
void Usart1_Config()
{
//开时钟:GPIOA,USART1
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA,ENABLE);
//配置对应的IO口 PA9(tx):复用推挽 PA10(RX):浮空输入
GPIO_InitTypeDef GPIO_InitStruct = {0};
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_10;
GPIO_Init(GPIOA,&GPIO_InitStruct);
//配置串口1 8数据位,0校验位,1停止位,波特率115200
USART_InitTypeDef USART_InitStruct = {0};//可以通过结构体类型跳转
USART_InitStruct.USART_BaudRate = 115200;//波特率
USART_InitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//硬件控制流不开
USART_InitStruct.USART_Mode = USART_Mode_Tx|USART_Mode_Rx;//打开发送和接收
USART_InitStruct.USART_Parity = USART_Parity_No;
USART_InitStruct.USART_StopBits = USART_StopBits_1;
USART_InitStruct.USART_WordLength = USART_WordLength_8b;
USART_Init(USART1,&USART_InitStruct);
USART_Cmd(USART1,ENABLE);
//配置串口1的中断
//在串口1产生接收的时候,会产生中断,我们直接去中断函数里面处理就可以了
//选择串口1的中断原因
USART_ITConfig(USART1,USART_IT_RXNE,ENABLE);//USART1->CR1 |= 0x1<<5;//使能串口1的接收非空中断
NVIC_SetPriority(USART1_IRQn,7);//设置优先级0~15
NVIC_EnableIRQ(USART1_IRQn);//使能中断通道
}
void SendData(uint8_t data)
{
while((USART1->SR&0x01<<6)==0){}//等待上次发送完成
USART1->DR = data;//发送数据
}
int fputc(int ch, FILE *f)
{
//printf函数最终会跳转到这里来运行
while((USART1->SR&0x1<<6)==0);
//发送数据
USART1->DR = (uint8_t)ch;
return ch;
}
void USART1_IRQHandler(void)
{
uint8_t data=0;
if((USART1->SR&0x1<<5)!=0)
{//执行该中断函数的原因有很多,所以判断一下是不是接收导致的
//接收数据
data = USART_ReceiveData(USART1);//读操作,同时也是清空中断标志位
USART_SendData(USART1, data);
}
}
usart.h
#ifndef _USART_H_
#define _USART_H_
#include "stm32f10x.h"
#include "stdio.h"
void Usart1_Config();
void SendData(uint8_t data);
int fputc(int ch, FILE *f);
#endif
2.配置时钟和IO
首先创建一个kqm.c.h文件用来专门配置该模块
和串口1一样,只不过要注意此时是UART4,引脚为PC11。
//开时钟 U4 PC11RX
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_UART4,ENABLE);
//配置io
GPIO_InitTypeDef GPIO_InitStruct = {0};
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_11;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC,&GPIO_InitStruct);
3.配置串口初始化,使能以及中断

初始化要将波特率改为9600,然后只用打开接收就行,其他与串口1一样。
使能就不说了,改个参数就行。
中断也一样,只用改改参数。
//配置串口 波特率9600 数据位8,校验位0,停止位1
USART_InitTypeDef USART_InitStruct = {0};//可以通过结构体类型跳转
USART_InitStruct.USART_BaudRate = 9600;//波特率
USART_InitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//硬件控制流不开
USART_InitStruct.USART_Mode = USART_Mode_Rx;//打开接收
USART_InitStruct.USART_Parity = USART_Parity_No;
USART_InitStruct.USART_StopBits = USART_StopBits_1;
USART_InitStruct.USART_WordLength = USART_WordLength_8b;
USART_Init(UART4,&USART_InitStruct);
//使能串口
USART_Cmd(UART4,ENABLE);
//配置串口4的中断(采用中断接收)
USART_ITConfig(UART4,USART_IT_RXNE,ENABLE);//使能串口4 的接收非空中断
USART_ITConfig(UART4,USART_IT_IDLE,ENABLE);//总线空闲中断
NVIC_SetPriority(UART4_IRQn,7);//设置优先级0~15
NVIC_EnableIRQ(UART4_IRQn);//使能中断通道
4.中断函数
依旧是先去启动文件中找到该串口的中断函数复制过来。
然后使用USART_GetITStatus函数进行标志位判断,若为1则代表传输完成。
由于数据位为8位所以此时需要定义一个数组来存放这8位数组。
还需要定义一个参数来计数,每当存放够8位时,清0,再从头开始覆盖存入数据。此刻就完成了8位数据获取。
uint8_t data=0;
//判断接收中断是否发生
if(USART_GetITStatus(UART4,USART_IT_RXNE)==SET)
{
data = UART4->DR;
u4recive[u4count]=data;
u4count++;
u4count%=8;
//USART1->DR = data;//回显
}
为了判断该模块是否传输完数据,此时我们要使用一个新的知识:中断空闲
USART_GetITStatus(UART4,USART_IT_IDLE)
当结尾时IDLE时就代表此时判断的是中断空闲。
当中断空闲被置为1时,就代表示总线空闲,8位数据传完了,接收完毕。此时想要清理中断空闲的话,需要先读SR再读DR。
然后在设置一个标志位u4flag,将其置为1代表接收完毕。
//触发空闲中断,表示总线空闲,接收完毕
if(USART_GetITStatus(UART4,USART_IT_IDLE)==SET)
{
data = UART4->SR;//清理空闲中断,先读SR再读DR
data = UART4->DR;
u4flag=1;
}
三、数据处理
先判断标志位u4flag是否为0,若为0这直接退出,不进入数据处理函数。

由手册可知,该模块有预热操作,为了屏蔽掉预热操作的数据,此时需要判断传输过来的8位数组,检查是否每位都为0xff,只要有一位不是就继续进行,否则向串口打印‘数据预热’。
if(u4flag==0)
{
return 0;
}
u4flag=0;
for(i=1;i<7;i++)
{
if(u4recive[i]!=0xff)
{
break;
}
}
if(i==7)
{
u4count=0;
printf("数据预热\r\n");
memset(u4recive,0,102);
return 0;
}
以上都没有问题之后,此时获取到的数组才是真正有用的数据。
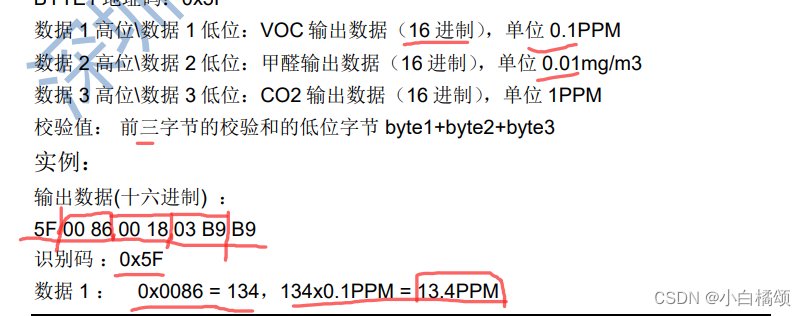

由手册可知该数据的转换模式,照着做就行。记得用完将数据位和标志位都清零。
voc=((u4recive[1]<<8)+u4recive[2])*0.11;
ch2o = ((u4recive[3]<<8)+u4recive[4])*0.01;
co2 = ((u4recive[5]<<8)+u4recive[6]);
printf("VOC = %.1f PPM\r\n甲醛 = %.2f MG/M3\r\nCo2 = %.0fPPM\r\n",voc,ch2o,co2);
u4count=0;
memset(u4recive,0,102);
return 0;
最后记得将处理函数添加到主函数的while(1)死循环中。
由于串口4用到了串口1输出,所以在main函数的配置应在串口1的后面。
四、关键代码
main.c
#include "stm32f10x.h"
#include "usart.h"
#include "stdio.h"
#include "delay.h"
#include "kqm.h"
#include "string.h"
int main()
{
NVIC_SetPriorityGrouping(5);//两位抢占两位次级
Usart1_Config();
Kqm_U4Config();
while(1)
{
KQM_DealData();
}
}
kqm.c
#include "stm32f10x.h"
#include "stdio.h"
#include "string.h"
float voc,ch2o,co2;
void Kqm_U4Config()
{
//开时钟 U4 PC11RX
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_UART4,ENABLE);
//配置io
GPIO_InitTypeDef GPIO_InitStruct = {0};
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_11;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC,&GPIO_InitStruct);
//配置串口 波特率9600 数据位8,校验位0,停止位1
USART_InitTypeDef USART_InitStruct = {0};//可以通过结构体类型跳转
USART_InitStruct.USART_BaudRate = 9600;//波特率
USART_InitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//硬件控制流不开
USART_InitStruct.USART_Mode = USART_Mode_Rx;//打开接收
USART_InitStruct.USART_Parity = USART_Parity_No;
USART_InitStruct.USART_StopBits = USART_StopBits_1;
USART_InitStruct.USART_WordLength = USART_WordLength_8b;
USART_Init(UART4,&USART_InitStruct);
//使能串口
USART_Cmd(UART4,ENABLE);
//配置串口4的中断(采用中断接收)
USART_ITConfig(UART4,USART_IT_RXNE,ENABLE);//使能串口4 的接收非空中断
USART_ITConfig(UART4,USART_IT_IDLE,ENABLE);//总线空闲中断
NVIC_SetPriority(UART4_IRQn,7);//设置优先级0~15
NVIC_EnableIRQ(UART4_IRQn);//使能中断通道
}
uint8_t u4recive[102]={0};
uint8_t u4count=0;
uint8_t u4flag=0;
uint8_t i=0;
void UART4_IRQHandler(void)
{
uint8_t data=0;
//判断接收中断是否发生
if(USART_GetITStatus(UART4,USART_IT_RXNE)==SET)
{
data = UART4->DR;
u4recive[u4count]=data;
u4count++;
u4count%=8;
//USART1->DR = data;//回显
}
//触发空闲中断,表示总线空闲,接收完毕
if(USART_GetITStatus(UART4,USART_IT_IDLE)==SET)
{
data = UART4->SR;//清理空闲中断,先读SR再读DR
data = UART4->DR;
u4flag=1;
}
}
uint8_t KQM_DealData()
{
if(u4flag==0)
{
return 0;
}
u4flag=0;
for(i=1;i<7;i++)
{
if(u4recive[i]!=0xff)
{
break;
}
}
if(i==7)
{
u4count=0;
printf("数据预热\r\n");
memset(u4recive,0,102);
return 0;
}
voc=((u4recive[1]<<8)+u4recive[2])*0.11;
ch2o = ((u4recive[3]<<8)+u4recive[4])*0.01;
co2 = ((u4recive[5]<<8)+u4recive[6]);
printf("VOC = %.1f PPM\r\n甲醛 = %.2f MG/M3\r\nCo2 = %.0fPPM\r\n",voc,ch2o,co2);
u4count=0;
memset(u4recive,0,102);
return 0;
}
kqm.h
#ifndef _KQM_H_
#define _KQM_H_
#include "stm32f10x.h"
void Kqm_U4Config();
uint8_t KQM_DealData();
#endif
其他代码遇上几节课一样。
总结
1.学会了KQM6600空气质量传感器模块的接线和配置。
2.学会了使用空闲中断,以及数据的获取与处理。