目录
- 名词释义
- 硬软件版本
- Zynq MPSoC / RFSoC 动态 DDR 配置简介
- 具体操作方法
- PCW GUI 配置
- 启用动态 DDR 配置功能
- I2C 硬件要求
- 根据硬件修改 FSBL
- 初始化 I2C 控制器
- 选择 I2C Mux 的 Slave
- 读取 EEPROM 的第一页
- 读取 EEPROM 的第二页
- 调试
- 参考文档
本文首发于 Josh Gao 的博客:https://josh-gao.top/posts/11cd1dc.html
对于 DIMM 拓扑的 DDR,通常可以使用 I2C 对搭载在 DIMM 上的 SPD EEPROM 进行读取后获得配置参数,然后对 DDR 控制器进行配置。
AMD Xilinx UG1085 的 Dynamic DDR Configuration 一节指出,当 DDR 控制器处于复位状态时,可以在运行时通过 FSBL 获取 DDR 参数并对 DDR 控制器进行初始化。
本文基于 Zynq RFSoC,对 PS 端的 SO-DIMM DDR 进行动态配置。
名词释义
- BSP:Board Support Package,板级支持包
- EEPROM:Electrically-Erasable Programmable Read-Only Memory,电子擦除式可复写只读存储器
- FSBL:First Stage Bootloader,第一阶段引导加载程序
- DDR DRAM:Double Data Rate Synchronous Dynamic Random-Access Memory,双倍数据率同步动态随机存取存储器
- DIMM:Dual In-line Memory Modules,双列直插式存储模块
- PCW:Processing System Configuration Wizard,处理系统配置向导
- SO-DIMM:Small Outline Dual In-line Memory Modules,小外形双列直插式内存模块
- SPD:Serial Presence Detect,串行存在检测
硬软件版本
| 硬软件 | 型号/版本 |
|---|---|
| FPGA | Zynq RFSoC XCZU48DR-2-FSVG1517-I |
| DDR4 | Micron MTA4ATF51264HZ-2G6E1 |
| I2C Mux | TI TCA9548APWR |
| Vivado | 2024.1 |
| Vitis Classic | 2024.1 |
Zynq MPSoC / RFSoC 动态 DDR 配置简介
Zynq MPSoC / RFSoC 动态 DDR 配置具有如下特性:
- 无需在 Vivado 中进行改动即可更换 DIMM,并使用动态 DDR 配置初始化 DDR;
- 支持 DDR3 和 DDR4 DIMM;
- 单一的 PetaLinux BSP 即可支持任何可安装的 DIMM 器件。
注:动态 DDR 配置功能仅可用于 PS DIMM DDR,不支持颗粒 DDR。
具体操作方法
PCW GUI 配置
在使用动态 DDR 配置之前,需要在如图 1 的 Vivado 的 PCW GUI 中启用 DDR 控制器,且将“DDR Controller Options”部分设置为:
- Memory Type:DDR4 或 DDR3
- Components:UDIMM 或 RDIMM
- ECC:Enabled 或 Disabled
- Effective DRAM Bus Width:64 Bit
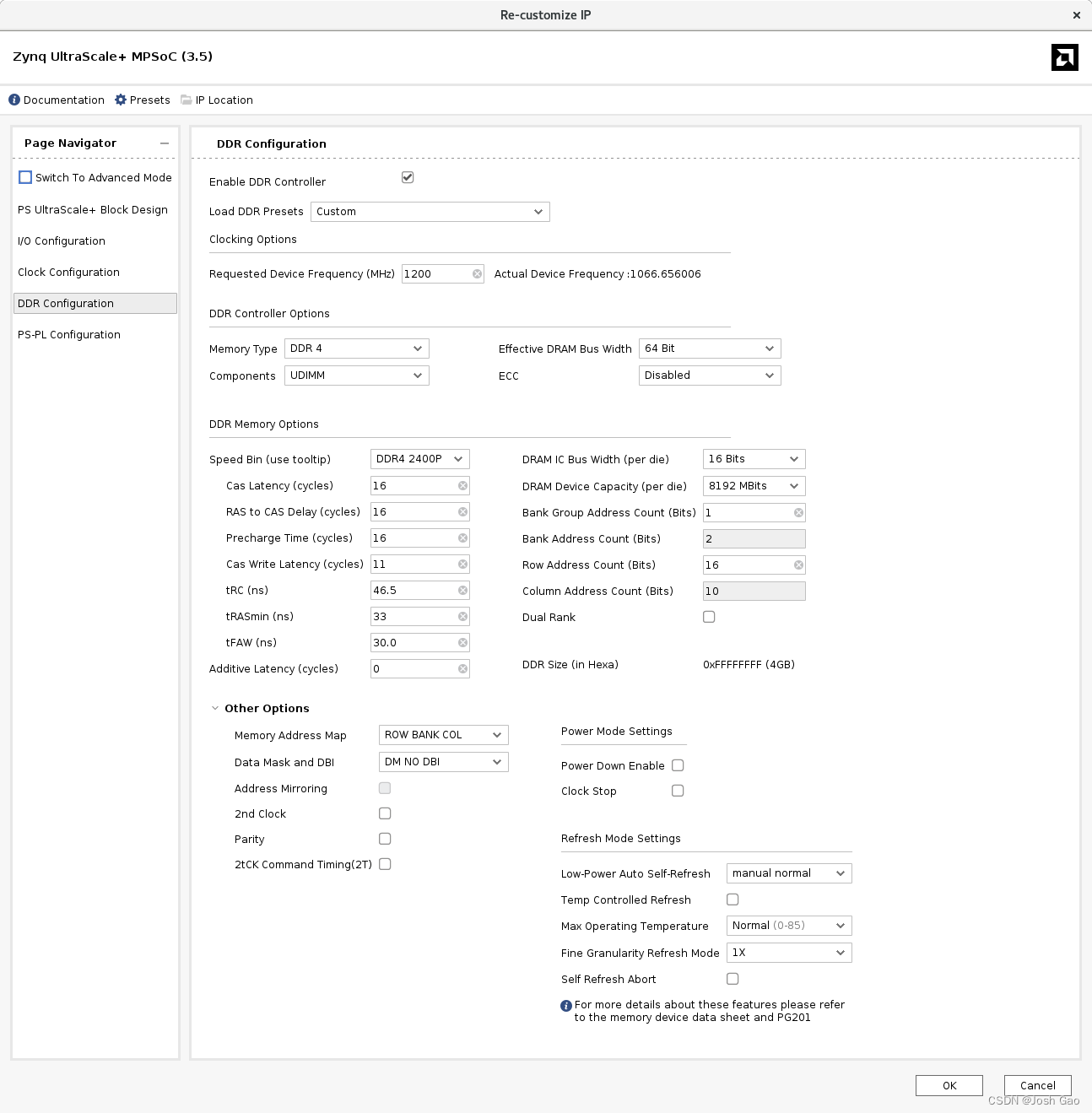
动态 DDR 配置将自动读取 SPD 表,并设置“DDR Memory Option”部分的所有参数,如下表。
| Option | Value Example | Option | Value Example |
|---|---|---|---|
| Speed Bin (Use Tooltip) | DDR42133P | DRAM IC Bus Width (per die) | 8 Bits |
| Cas Latency | 15 | DRAM Device Capacity(per die) | 4096 MBits |
| RAS to CAS Delay (Cycles) | 15 | Bank Group Address Count (Bits) | 2 |
| Pre-charge Time (Cycles) | 15 | Bank Address Count (Bits) | 2 |
| Cas Write Latency (Cycles) | 14 | Row Address Count (Bits) | 15 |
| tRC (ns) | 46.5 | Column Address Count | 10 |
| tRASmin (ns) | 33 | Dual Rank | |
| tFAW (ns) | 21 | DDR Size (in hexa) | 0XFFFFFFFF (4GB) |
| Additive Latency (Cycles) | 0 |
而“Other Options”部分的所有值都需要用户根据需要设置,无法从 SPD 表中获得,如下表。
| Option | Value Example | Option | Value Example |
|---|---|---|---|
| Memory Address Map | ROW BANK COL | Power Mode Settings | Power Down Enable |
| Data Mask and DBI | DM NO DBI | Clock Stop | |
| Address Mirroring | Refresh Mode Settings | ||
| 2nd Clock | Lower-Power Auto Self-Refresh | Manual Normal | |
| Parity | Temp Controlled Refresh | ||
| 2Tck Command Timing (2T) | Max. Operating Temperature | Normal (0-85) | |
| Fine Granularity Refresh Mode | 1x | ||
| Self-Refresh Abort |
启用动态 DDR 配置功能
要启用动态 DDR 配置功能,需要在 Vivado 中使用 TCL 命令将参数 CONFIG.PSU_DYNAMIC_DDR_CONFIG_EN 置为 1:
set_property CONFIG.PSU_DYNAMIC_DDR_CONFIG_EN 1 [get_bd_cells /zynq_ultra_ps_e]
这里的 zynq_ultra_ps_e 需要替换为实际 Block Design 中 Zynq UltraScale+ MPSoC IP 核的名称,如图 2。
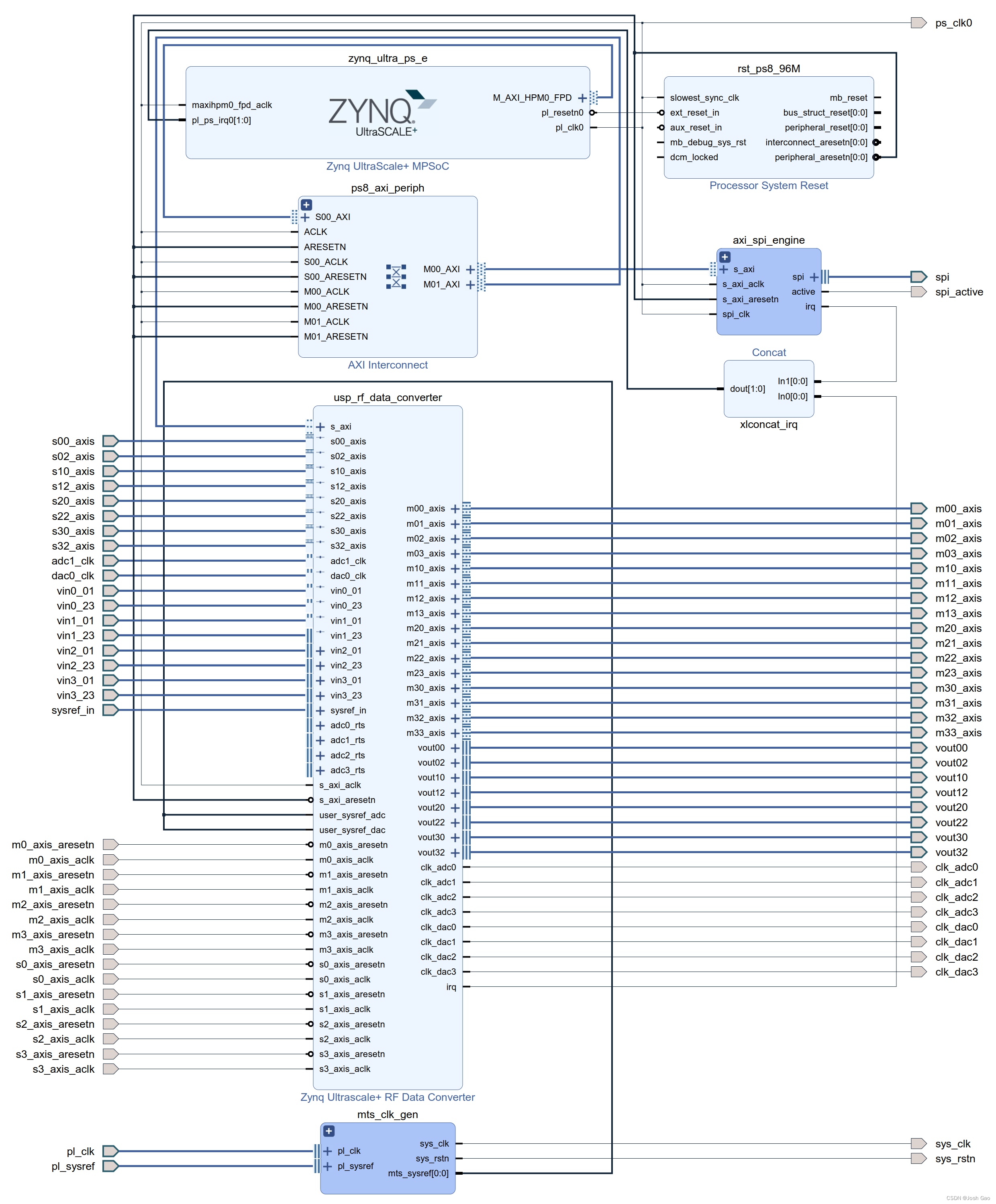
然后重新生成 Output Products 即可(若除 PS 处理器外还有其他逻辑,则需要重新生成比特流)。FSBL 将会在启动过程中使用该参数,并执行动态 DDR 配置。
如果设置了上述参数却出现了如下警告,是因为 GUI 中 DDR 类型必须为 UDIMM 或 RDIMM,不能为 Component。
WARNING: [BD 41-721] Attempt to set value '1' on disabled parameter 'PSU_DYNAMIC_DDR_CONFIG_EN' of cell '/zynq_ultra_ps_e_0' > is ignored
I2C 硬件要求
由于动态 DDR 配置需要在 FSBL 中使用 I2C 读取 DDR SPD EEPROM 中的数据,而在 Xilinx 自动生成 FSBL 中,I2C 读取 DDR SPD EEPROM 的方式是固定的,因此若不想对生成的 FSBL 进行修改,则需要在硬件上适配 FSBL。
Xilinx FSBL 使用 I2C1(1 号 I2C 控制器),借助一个 I2C Mux 与 SPD EEPROM 进行通信,使用的地址为:
- I2C Mux 地址: 0x75
- I2C Slave 地址: 0b1010001 (0x51)
- SODIMM SA[2:0]: 0b001
从 Vivado 2019.1 开始,动态 DDR 配置对于所有使用 DIMM DDR 的 Zynq MPSoC / RFSoC 评估板均启用,在使用预置硬件配置时无需额外用户操作。
根据硬件修改 FSBL
若 I2C 硬件连接不满足上述要求,还可以按照实际连接关系修改 FSBL。FSBL 中使用 I2C 读取 DDR SPD EEPROM 的函数为 u32 XFsbl_IicReadSpdEeprom(u8 *SpdData)。
u32 XFsbl_DdrInit(void)
{
// ...
/* Get the Model Part Number from the SPD stored in EEPROM */
Status = XFsbl_IicReadSpdEeprom(SpdData);
if (Status != XFSBL_SUCCESS) {
Status = XFSBL_FAILURE;
goto END;
}
// ...
}
下面对函数进行拆解,结合注释可以更好理解操作的过程。
初始化 I2C 控制器
首先对 I2C 控制器 I2C1 进行初始化。值得一提的是,从 Vivado / Vitis 2023.2 版本开始,对设备进行寻址时,不再依赖于设备的 Device ID,而是直接使用基地址 Base Address,少了从 Device ID 到 Base Address 这一步操作,从开发的角度来看更为合理了。
若设计使用了 I2C 控制器 I2C0,则可以改为使用基地址
XPAR_I2C0_BASEADDR或 Device IDXPAR_PSU_I2C_0_DEVICE_ID来寻找设备。
static u32 XFsbl_IicReadSpdEeprom(u8 *SpdData)
{
// ...
/* Lookup for I2C-1U device */
#ifdef SDT
ConfigIic = XIicPs_LookupConfig(XPAR_I2C1_BASEADDR);
#else
ConfigIic = XIicPs_LookupConfig(XPAR_PSU_I2C_1_DEVICE_ID);
#endif
if (!ConfigIic) {
UStatus = XFSBL_FAILURE;
goto END;
}
/* Initialize the I2C device */
Status = XIicPs_CfgInitialize(&IicInstance, ConfigIic,
ConfigIic->BaseAddress);
if (Status != XST_SUCCESS) {
UStatus = XFSBL_FAILURE;
goto END;
}
/* Set the Serial Clock for I2C */
Status = XIicPs_SetSClk(&IicInstance, XFSBL_IIC_SCLK_RATE);
if (Status != XST_SUCCESS) {
UStatus = XFSBL_FAILURE;
goto END;
}
// ...
}
选择 I2C Mux 的 Slave
由于开发板搭载了较多 I2C 外设,而 Zynq MPSoC / RFSoC 的 I2C 控制器数量有限,因此需要通过 I2C Mux 来扩展所连 I2C Slave 的数量。
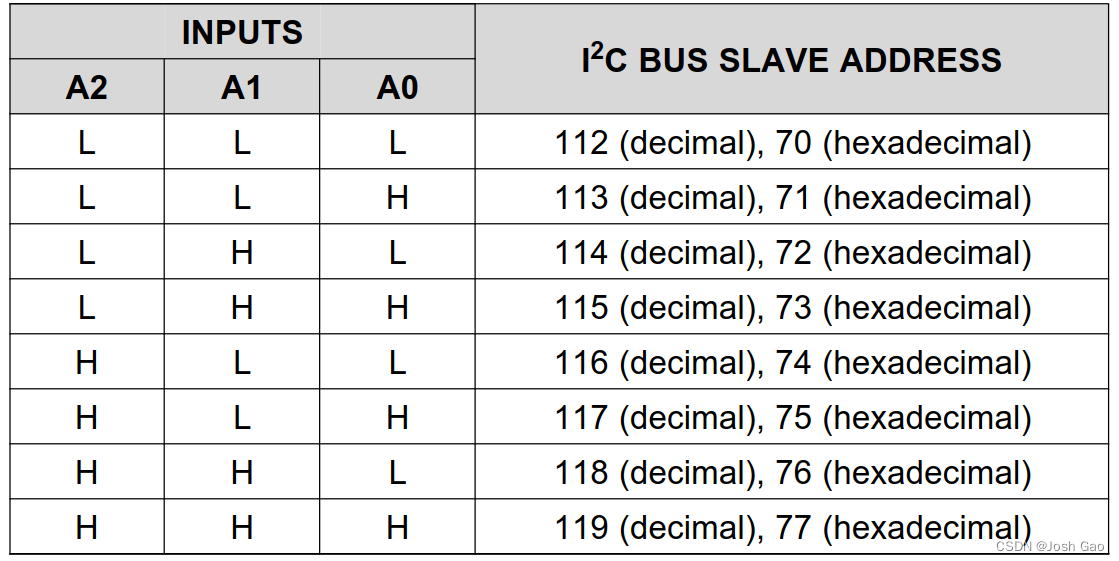
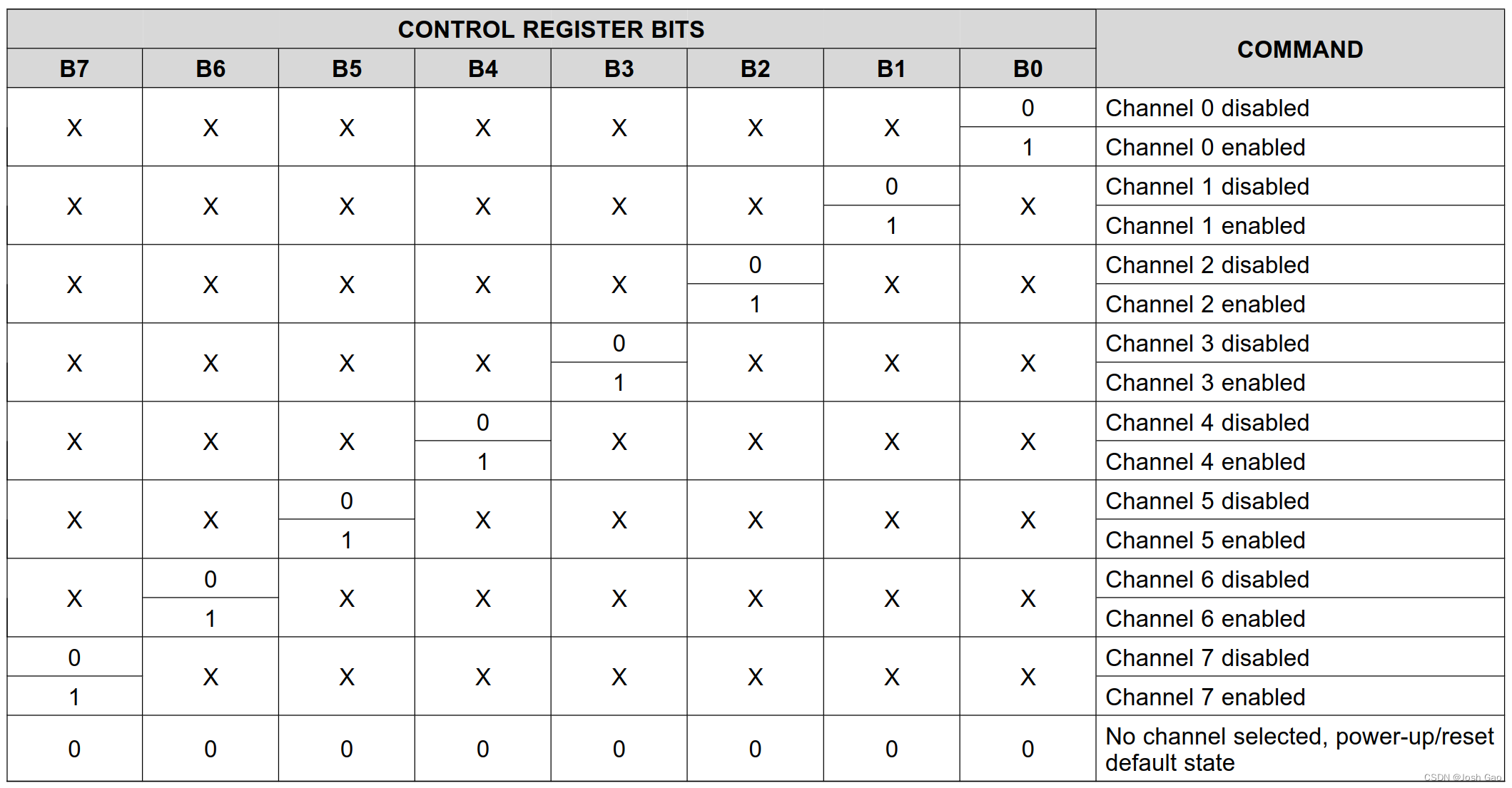
本板卡 I2C1 原理图如图 3,所用 I2C Mux 的型号为 TCA9548A,其地址配置方式如图 4,Slave 选择方式如图 5,这里均和评估板保持一致,因此可以与自动生成的 FSBL 兼容。
结合图 3 和图 4 可知 I2C Mux 的地址为 0x75,从图 3 中可知 PS DDR4 SODIMM 的 I2C 连接在了第 3 号 Slave 的位置,因此按照图 5 需要将 B3 置 1,也即需要向地址为 0x75 的 I2C Mux TCA9548A 的控制寄存器中写入 0x08。
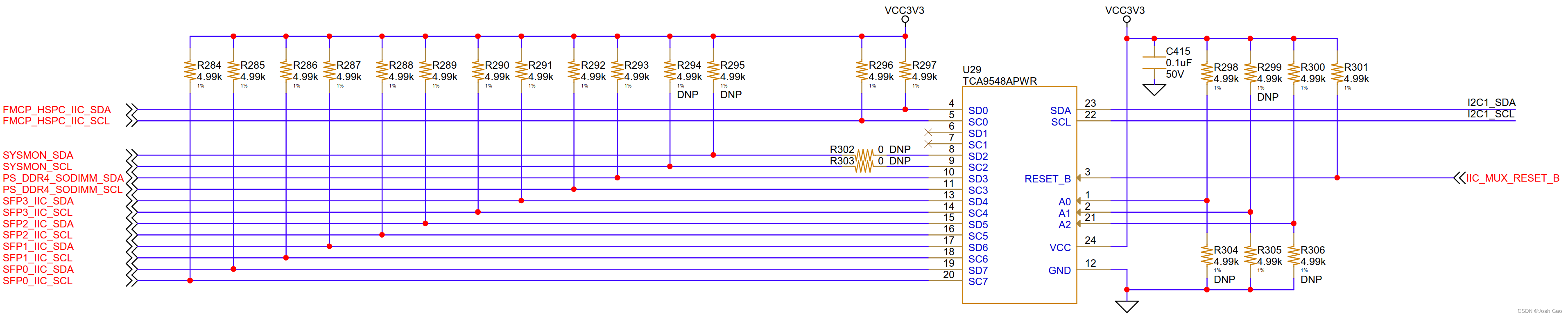
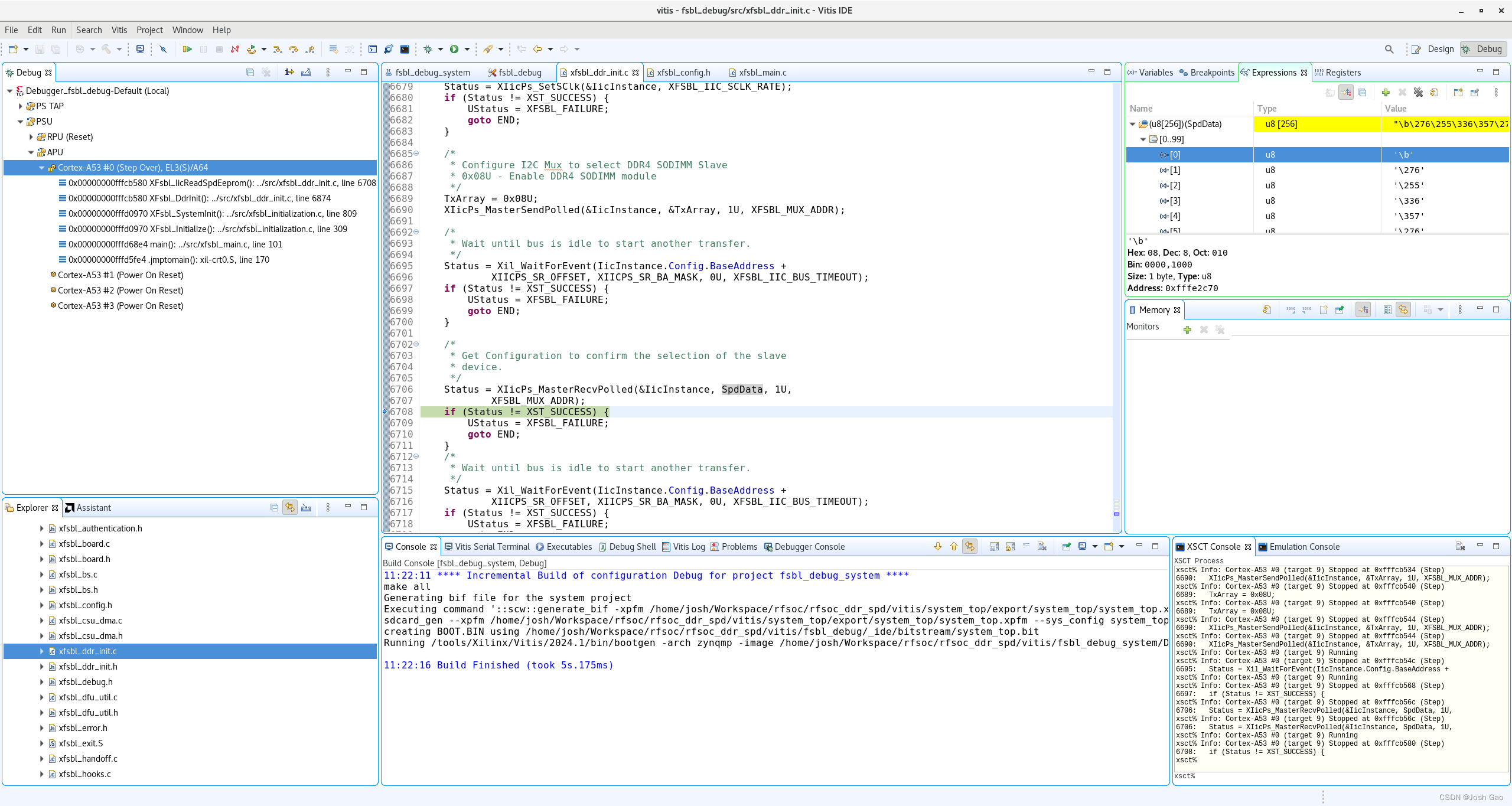
按照上述分析,下面的代码就不难理解了,首先向地址为 XFSBL_MUX_ADDR(默认为 0x75)的 I2C Mux 写入选通配置 0x08,然后从同样的地址回读,验证配置是否正确。
- 若设计中没有使用到 I2C Mux,而是直接将 I2C 控制器连接到了 DIMM,则可以删去这部分代码;
- 若设计中 I2C Mux 地址不同,则可以修改
XFSBL_MUX_ADDR的宏定义;- 若设计中 I2C Mux 连接的 Slave 不同,可以修改 I2C 发送的
TxArray。
static u32 XFsbl_IicReadSpdEeprom(u8 *SpdData)
{
// ...
/*
* Configure I2C Mux to select DDR4 SODIMM Slave
* 0x08U - Enable DDR4 SODIMM module
*/
TxArray = 0x08U;
XIicPs_MasterSendPolled(&IicInstance, &TxArray, 1U, XFSBL_MUX_ADDR);
/*
* Wait until bus is idle to start another transfer.
*/
Status = Xil_WaitForEvent(IicInstance.Config.BaseAddress +
XIICPS_SR_OFFSET, XIICPS_SR_BA_MASK, 0U, XFSBL_IIC_BUS_TIMEOUT);
if (Status != XST_SUCCESS) {
UStatus = XFSBL_FAILURE;
goto END;
}
/*
* Get Configuration to confirm the selection of the slave
* device.
*/
Status = XIicPs_MasterRecvPolled(&IicInstance, SpdData, 1U,
XFSBL_MUX_ADDR);
if (Status != XST_SUCCESS) {
UStatus = XFSBL_FAILURE;
goto END;
}
/*
* Wait until bus is idle to start another transfer.
*/
Status = Xil_WaitForEvent(IicInstance.Config.BaseAddress +
XIICPS_SR_OFFSET, XIICPS_SR_BA_MASK, 0U, XFSBL_IIC_BUS_TIMEOUT);
if (Status != XST_SUCCESS) {
UStatus = XFSBL_FAILURE;
goto END;
}
// ...
}
读取 EEPROM 的第一页
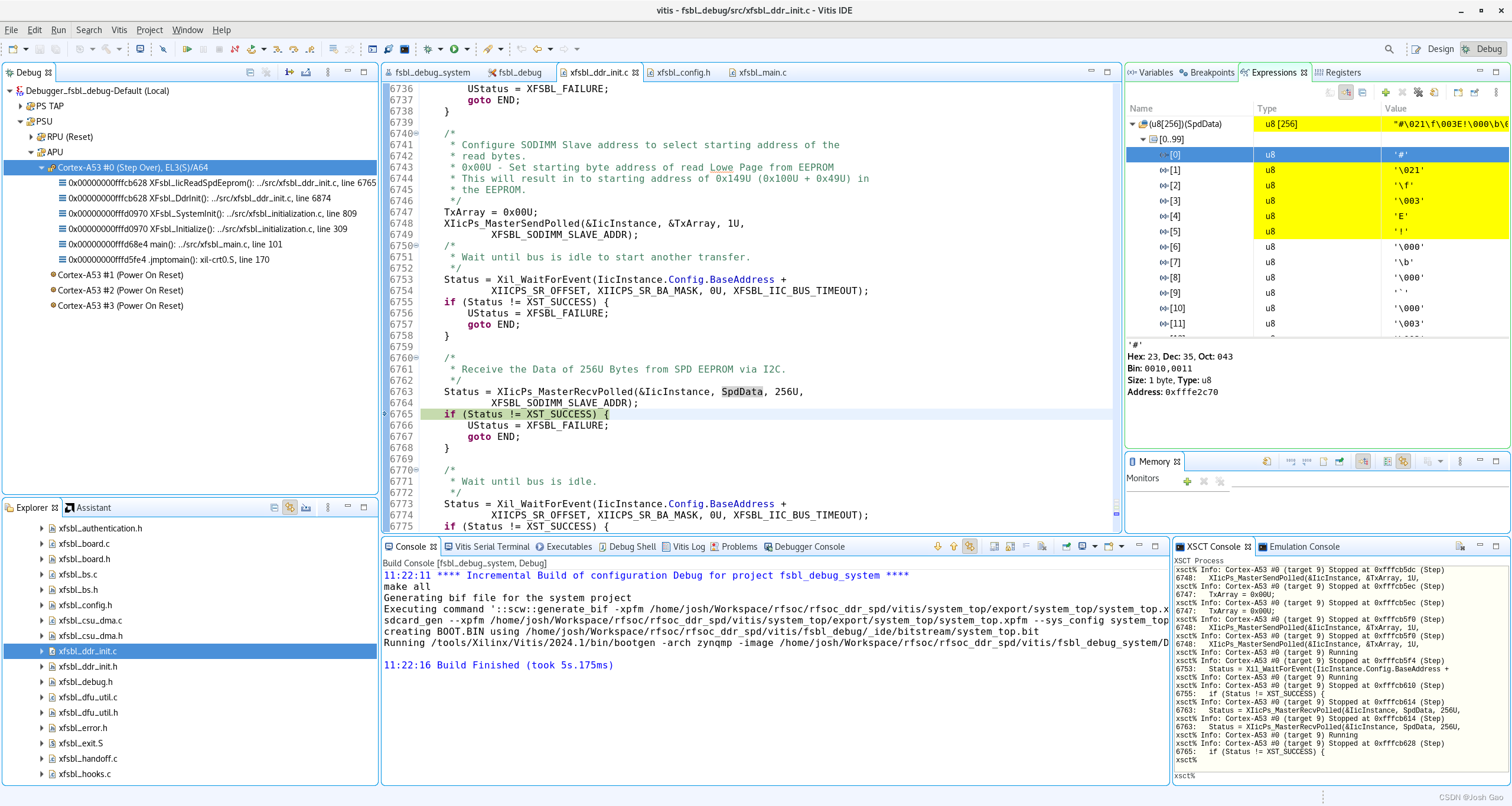
配置完 I2C Mux 后,即可开始读取 SPD EEPROM 中的内容了。图 6 给出了 EEPROM 支持的指令表,由于 EEPROM 一次读的最大长度为一页,也即一个 Page,因此需要分两次对其中的两个 Page 进行读取。
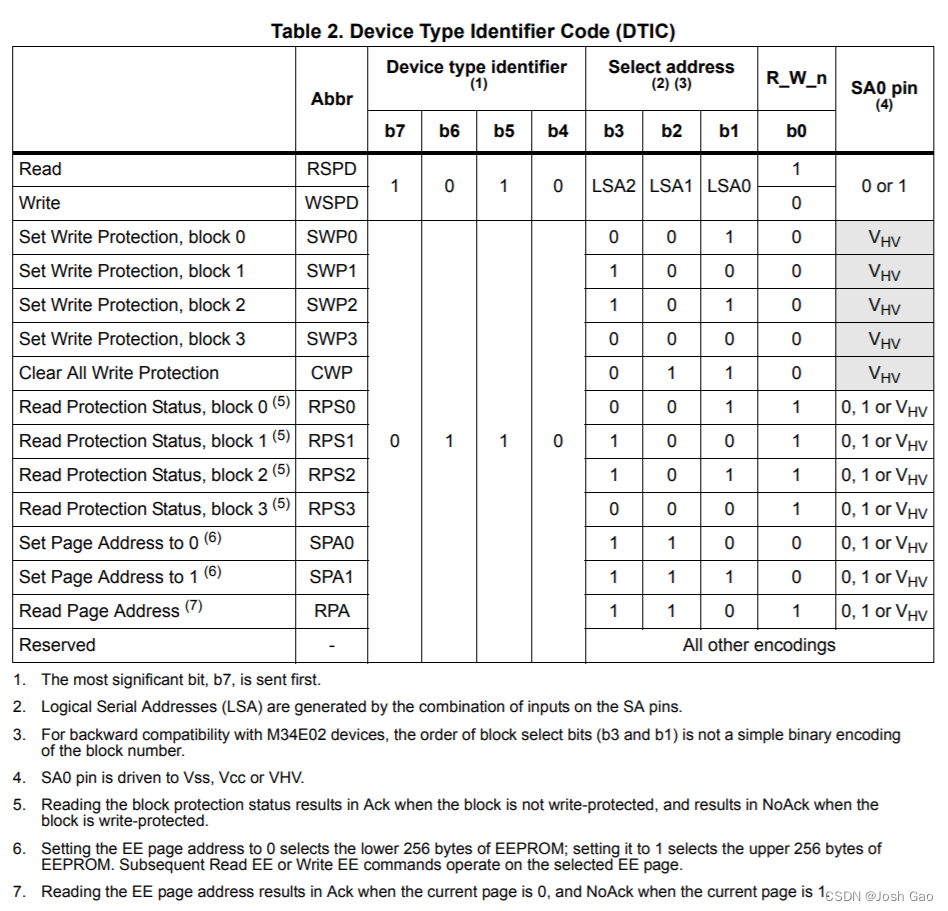
首先设置 Page Address 为 0,也即向地址 0x36 中写入 0x00,表示从 Page 0 中进行读取,一次读取 256 Byte。
通常 SPD EEPROM 的 Page 选择地址是固定的,如果 Page Address 0 的地址有变更,修改
XFSBL_SODIMM_CONTROL_ADDR_LOW的宏定义即可。
static u32 XFsbl_IicReadSpdEeprom(u8 *SpdData)
{
// ...
/*
* Set SODIMM control address to enable access to lower
* EEPROM page (0U to 255U Bytes).
* 0x00U - Enable Read of Lower Page from EEPROM
*/
TxArray = 0x00U;
XIicPs_MasterSendPolled(&IicInstance, &TxArray, 1U,
XFSBL_SODIMM_CONTROL_ADDR_LOW);
/*
* Wait until bus is idle to start another transfer.
*/
Status = Xil_WaitForEvent(IicInstance.Config.BaseAddress +
XIICPS_SR_OFFSET, XIICPS_SR_BA_MASK, 0U, XFSBL_IIC_BUS_TIMEOUT);
if (Status != XST_SUCCESS) {
UStatus = XFSBL_FAILURE;
goto END;
}
/*
* Configure SODIMM Slave address to select starting address of the
* read bytes.
* 0x00U - Set starting byte address of read Lowe Page from EEPROM
* This will result in to starting address of 0x149U (0x100U + 0x49U) in
* the EEPROM.
*/
TxArray = 0x00U;
XIicPs_MasterSendPolled(&IicInstance, &TxArray, 1U,
XFSBL_SODIMM_SLAVE_ADDR);
/*
* Wait until bus is idle to start another transfer.
*/
Status = Xil_WaitForEvent(IicInstance.Config.BaseAddress +
XIICPS_SR_OFFSET, XIICPS_SR_BA_MASK, 0U, XFSBL_IIC_BUS_TIMEOUT);
if (Status != XST_SUCCESS) {
UStatus = XFSBL_FAILURE;
goto END;
}
/*
* Receive the Data of 256U Bytes from SPD EEPROM via I2C.
*/
Status = XIicPs_MasterRecvPolled(&IicInstance, SpdData, 256U,
XFSBL_SODIMM_SLAVE_ADDR);
if (Status != XST_SUCCESS) {
UStatus = XFSBL_FAILURE;
goto END;
}
/*
* Wait until bus is idle.
*/
Status = Xil_WaitForEvent(IicInstance.Config.BaseAddress +
XIICPS_SR_OFFSET, XIICPS_SR_BA_MASK, 0U, XFSBL_IIC_BUS_TIMEOUT);
if (Status != XST_SUCCESS) {
UStatus = XFSBL_FAILURE;
goto END;
}
// ...
}
读取 EEPROM 的第二页
然后设置 Page Address 为 1,也即向地址 0x37 中写入 0x00,表示从 Page 0 中进行读取,一次读取 256 Byte。
通常 SPD EEPROM 的 Page 选择地址是固定的,如果 Page Address 1 的地址有变更,修改
XFSBL_SODIMM_CONTROL_ADDR_HIGH的宏定义即可。
static u32 XFsbl_IicReadSpdEeprom(u8 *SpdData)
{
// ...
/*
* Set SODIMM control address to enable access to upper
* EEPROM page (256U to 511U Bytes).
* 0x01U - Enable Read of Upper Page from EEPROM
*/
TxArray = 0x01U;
XIicPs_MasterSendPolled(&IicInstance, &TxArray, 1U,
XFSBL_SODIMM_CONTROL_ADDR_HIGH);
/*
* Wait until bus is idle to start another transfer.
*/
Status = Xil_WaitForEvent(IicInstance.Config.BaseAddress +
XIICPS_SR_OFFSET, XIICPS_SR_BA_MASK, 0U, XFSBL_IIC_BUS_TIMEOUT);
if (Status != XST_SUCCESS) {
UStatus = XFSBL_FAILURE;
goto END;
}
/*
* Configure SODIMM Slave address to select starting address of the
* read bytes.
* 0x00U - Set starting byte address of read Upper Page from EEPROM
* This will result in to starting address of 0x149U (0x100U + 0x49U) in
* the EEPROM.
*/
TxArray = 0x00U;
XIicPs_MasterSendPolled(&IicInstance, &TxArray, 1U,
XFSBL_SODIMM_SLAVE_ADDR);
/*
* Wait until bus is idle to start another transfer.
*/
Status = Xil_WaitForEvent(IicInstance.Config.BaseAddress +
XIICPS_SR_OFFSET, XIICPS_SR_BA_MASK, 0U, XFSBL_IIC_BUS_TIMEOUT);
if (Status != XST_SUCCESS) {
UStatus = XFSBL_FAILURE;
goto END;
}
/*
* Receive the Data of 256U Bytes from SPD EEPROM via I2C.
*/
Status = XIicPs_MasterRecvPolled(&IicInstance, &SpdData[256U], 256U,
XFSBL_SODIMM_SLAVE_ADDR);
if (Status != XST_SUCCESS) {
UStatus = XFSBL_FAILURE;
goto END;
}
/*
* Wait until bus is idle.
*/
Status = Xil_WaitForEvent(IicInstance.Config.BaseAddress +
XIICPS_SR_OFFSET, XIICPS_SR_BA_MASK, 0U, XFSBL_IIC_BUS_TIMEOUT);
if (Status != XST_SUCCESS) {
UStatus = XFSBL_FAILURE;
goto END;
}
// ...
}
调试
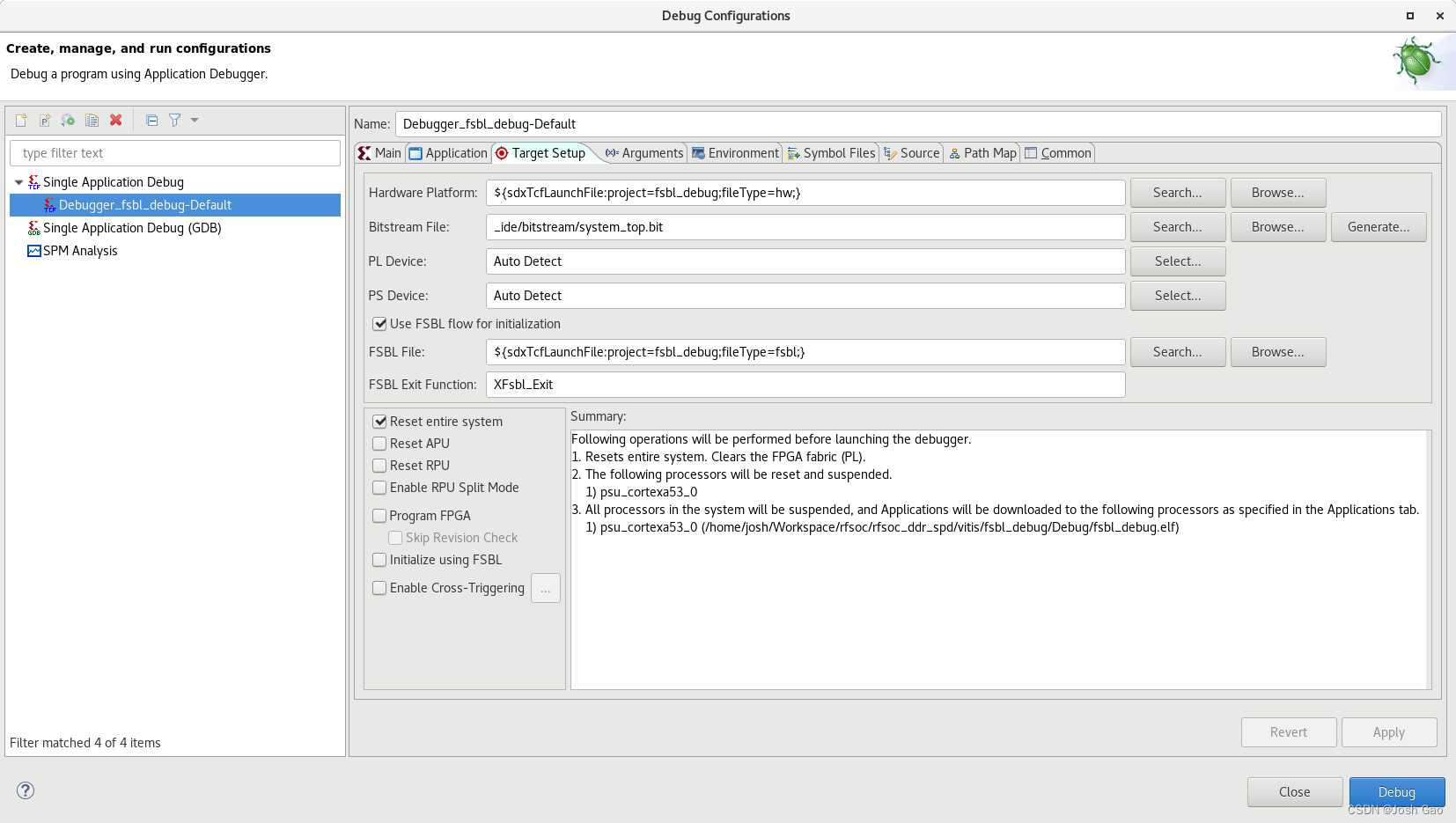
配置完成后可以实测了,这里对 FSBL 进行 Debug,观察整个读写的过程。在单独调试 FSBL 的时候,可以不勾选“Program FPGA”和“Initialize using FSBL”,如图 7。
将断点设置在函数 XFsbl_IicReadSpdEeprom() 被调用的地方。
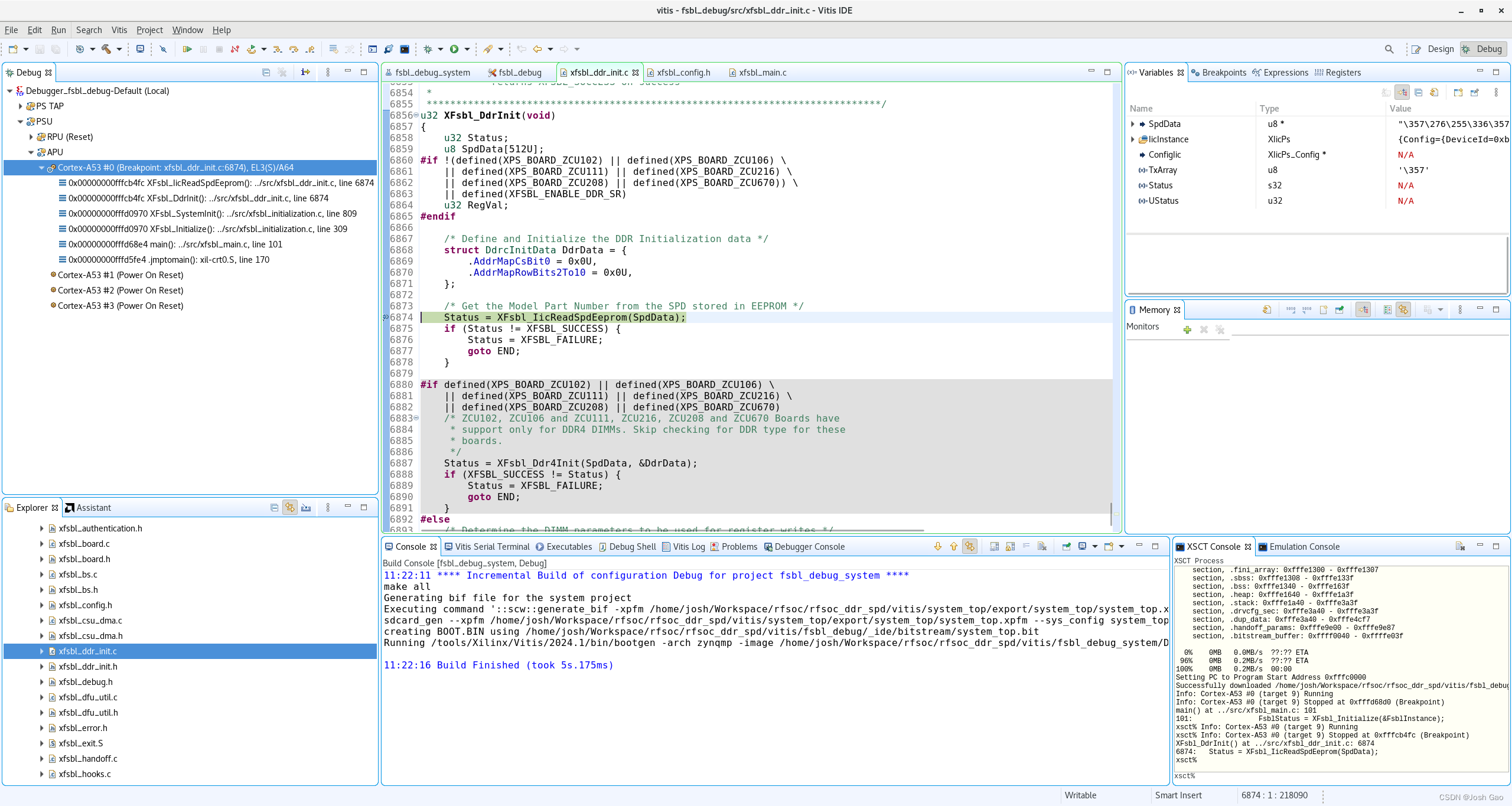
观察 I2C Mux 回读的数据。回读的数据存储在 SpdData 数组中,可以观察到数组的第 0 个字节为 0x08,与写入的数据一致。
然后观察 I2C EEPROM 回读的数据,并与 Micron 给出的 MTA4ATF51264HZ-2G6E1 的 SPD 数据进行对比,可以观察到数据是一致的。
最后,XFsbl_DdrInit() 函数的剩余部分会完成 DDR 参数的解析与 DDR 控制器的初始化。
参考文档
75768 - Zynq MPSoC Dynamic DDR Configuration Support for DIMM Devices
SPD I2c Address for DDR4 SODIMM