1 ToF摄像头分类
1.1 ToF原理
类似雷达测距,生成3D点云,或者叫3D贴图。ToF相机的分辨率一般在3万像素左右。ToF距离计算公式如图所示。
Figure 1-1 ToF距离计算公式
D:距离
c:光速
PHI:相位差
fmod:调制频率
1.2 3D结构光
生成点阵图像,类似打出光斑。
1.3 双目视觉
通过提前标定,利用视角差来计算。
2 超声波雷达USS
HC-SR04 (EM78P153A) which is a clone of a Devantech SRF04, SRF means Sonar Range Finder.
1)采用IO口TRIG触发测距,给至少10us的高电平信号;
2)模块自动发送8个40khz的方波,自动检测是否有信号返回;
3)有信号返回,通过IO口ECHO输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。测量距离 = (高电平时间 x 声速 (340M/S)) / 2。
3 毫米波雷达RADAR
速度、距离和方位角(Azimuth)。毫米波雷达的角分辨率不够。通信方式一般采用CAN接口。
AWR1642
4 激光雷达LiDAR
4.1 通信接口
激光雷达一般使用网络通信。激光雷达使用Ku、K、Ka波段。
Velodyne UDP数据都是小端格式(src192.168.1.201, dst255.255.255.255)。
https://github.com/ros-drivers/velodyne
LMS111-10100
4.2 Flash固态激光雷达
Flash原本的意思为快闪。而Flash激光雷达的原理也是快闪,这种固态激光雷达像一个手电筒一样,发射一个面阵光,再通过高灵敏度的传感器绘制环境图像。
4.3 ADAS Camera Trigger
SerDes摄像头出图分两种:一种是给它上电,配置好了后,按设定的帧率自己出,这种称为master模式;另一种是给一次触发信号出一帧,这个trigger信号来至于激光雷达,这种称为slave模式。
SerDes摄像头数据和激光雷达要同步,时间对时通过Linux ptp4l,这时的摄像头出图采用slave模式,也就是需要激光雷达trigger。
5 SoC
Nvidia使用Aquaman系列中(aqua-拉丁词根,表示water)的名字命名Auto Drive。
6 ROS
6.1 ROS编译工具
- catkin
- ament
- colcon: collective construction
7 Abbreviations
导航雷达:转圈的横棍子,JRC
LiDAR: Light RADAR
OPT8241:TI ToF
PCL:Point Cloud Library,一个开源的软件库,包含大量与点云有关的算法,包括显示点云数据、滤波、分割、特征提取、配准、重建等,支持Windows和Linux等平台,也可以在一些嵌入式开发板上使用。PCL在三维点云中的地位相当于OpenCV在图像处理和计算机视觉中的地位
ROS catkin:ROS早期的创始实验室叫做Willow Garage,而柳树(Willow)的花属于catkin花序
ToF:Time of Flight
VCSEL:vertical cavity surface emitting laser,垂直腔面发射激光器
自动驾驶ADAS
news2026/2/15 12:29:09
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/1861731.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章

KubeSphere 在互联网电商行业的应用实践
来自社区用户(SRE运维手记)投稿 背景
在云原生的时代背景下,Kubernetes 已经成为了主流选择。然而,Kubernetes 的原生操作复杂性和学习曲线较高,往往让很多团队在使用和管理上遇到挑战。因此,市面上出现了…


F5《企业DNS建设白皮书》中的DNS解析服务器最佳实践
在这个数字化转型加速的时代,DNS(域名系统)的重要性不言而喻。每一次重大事件都凸显了DNS的可靠性和安全性问题。对企业而言,它不仅关系到业务连续性,更是提供永续数字服务的关键。本文根据F5公司发布的《企业DNS建设白…
一款强大的上位机模拟通讯工具----HslCommunicationDemo
目录 引言
工具概述
官网下载链接
安装步骤
使用教程 引言 在工业自动化和机器人控制领域,上位机模拟通讯工具是工程师和开发者日常工作中不可或缺的一部分。这些工具不仅能帮助我们验证设备间的通信状态,还能在设备调试和集成过程中提供极大的便利。…

Jenkins+K8s实现持续集成(三)
接上面一篇JenkinsK8s实现持续集成(二),K8s创建秘钥。 看secret
kubectl get secret
删除secret
kubectl delete secret hello-secret -n train
创建secret
kubectl create secret docker-registry hello-secret --docker-server镜像仓库…
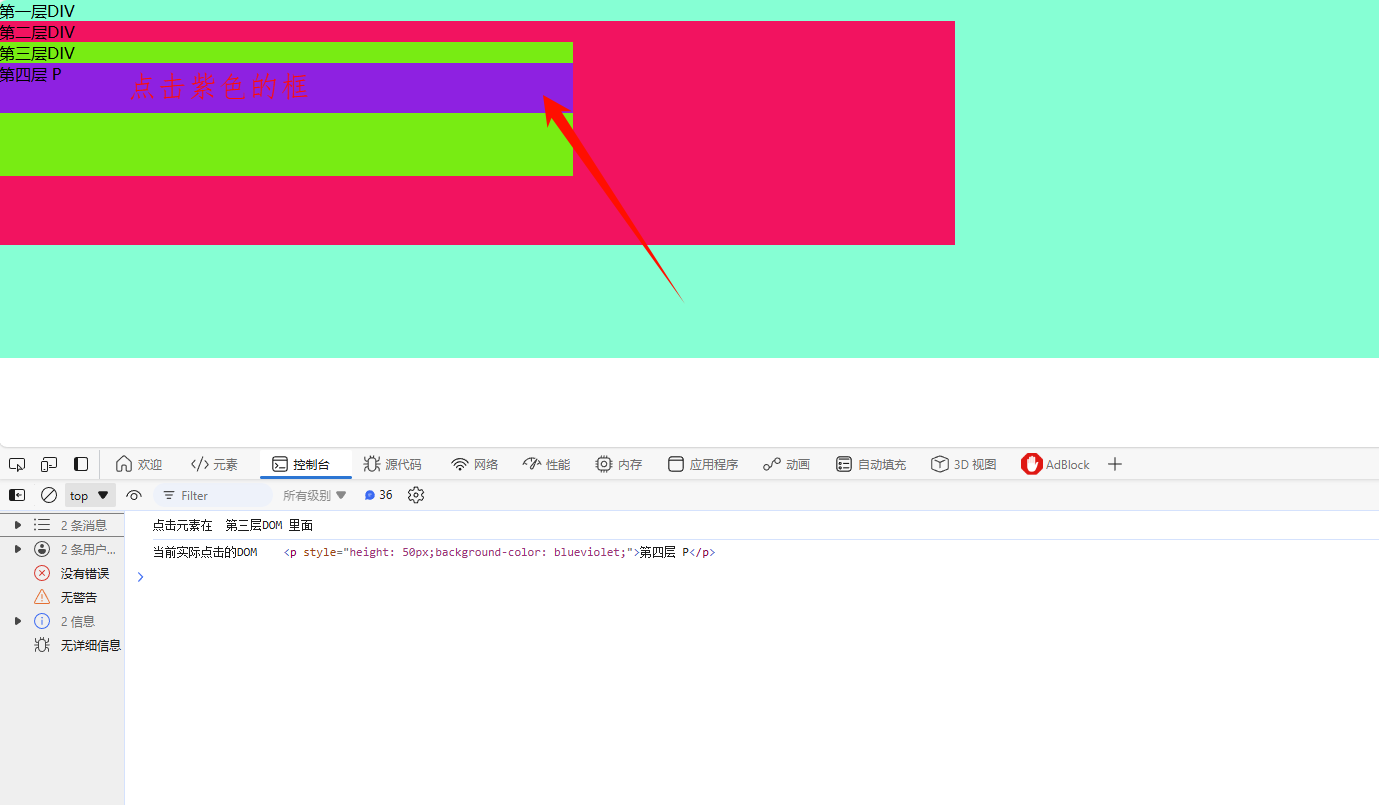
【日常记录】【JS】优雅检测用户是否在指定元素的外部点击
文章目录 1、界面基本布局2、代码实现3、参考链接 1、界面基本布局 <!DOCTYPE html>
<html lang"en"><head><meta charset"UTF-8"><meta name"viewport" content"widthdevice-width, initial-scale1.0">…

Qt案例-ApplicationExamples-Calqlatr
项目 一个Qt Quick应用程序设计的横向和纵向设备,使用自定义组件,响应式布局和JavaScript的应用程序逻辑。 项目路径: Qt\Examples\Qt-6.7.1\demos 环境:Qt6.7.1 MSVC 2019 64位
项目目录:
calqlatr--CMakeList.txt…

网工内推 | 深圳网工,国企,最高20k,六险一金,NA以上认证
01 沛顿科技(深圳)有限公司 🔷招聘岗位:网络工程师
🔷岗位职责:
1、负责网络设备管理及维护,确保网络系统的稳定运行; 2、负责有效规划及实施网络布线系统; 3、负责服务…
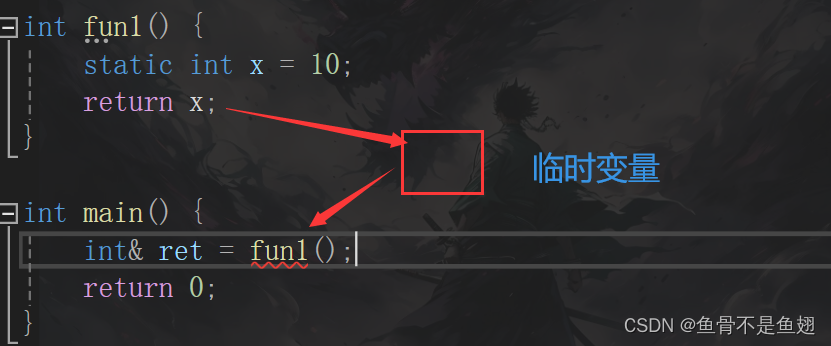
学习C++第三天——对引用的深入了解
引用
引用不是新定义一个变量,而是给已存在变量取了一个别名,编译器不会为引用变量开辟内存空 间,它和它引用的变量共用同一块内存空间。 一个变量可以有多个引用:
int main() {//一个变量可以有多个引用int a 10;int& b …
ubuntu的不同python版本的pip安装及管理
ubuntu的不同python版本的pip安装及管理_ubuntu 安装两个pip-CSDN博客https://blog.csdn.net/qq_32277533/article/details/106770850
老板舍不得买库存管理软件❓一招解决
在当今快节奏的商业环境中,仓库管理是企业运作中不可或缺的一环。对于许多中小型企业而言,简易且高效的库存管理系统尤为重要。搭贝简易库存管理系统针对仓库的出入库进行有效管理,帮助企业实现库存的透明化和流程的自动化。 客户的痛点
1. …

Java面试八股之Mybatis可以映射到枚举类吗
Mybatis可以映射到枚举类吗
Mybatis 可以映射到 Java 的枚举类型。默认情况下,Mybatis 会使用枚举类型的名称来进行映射。例如,如果你有一个如下的枚举类型:
public enum UserStatus { ACTIVE, INACTIVE
}
Mybatis 会将数据库中的字符串值…
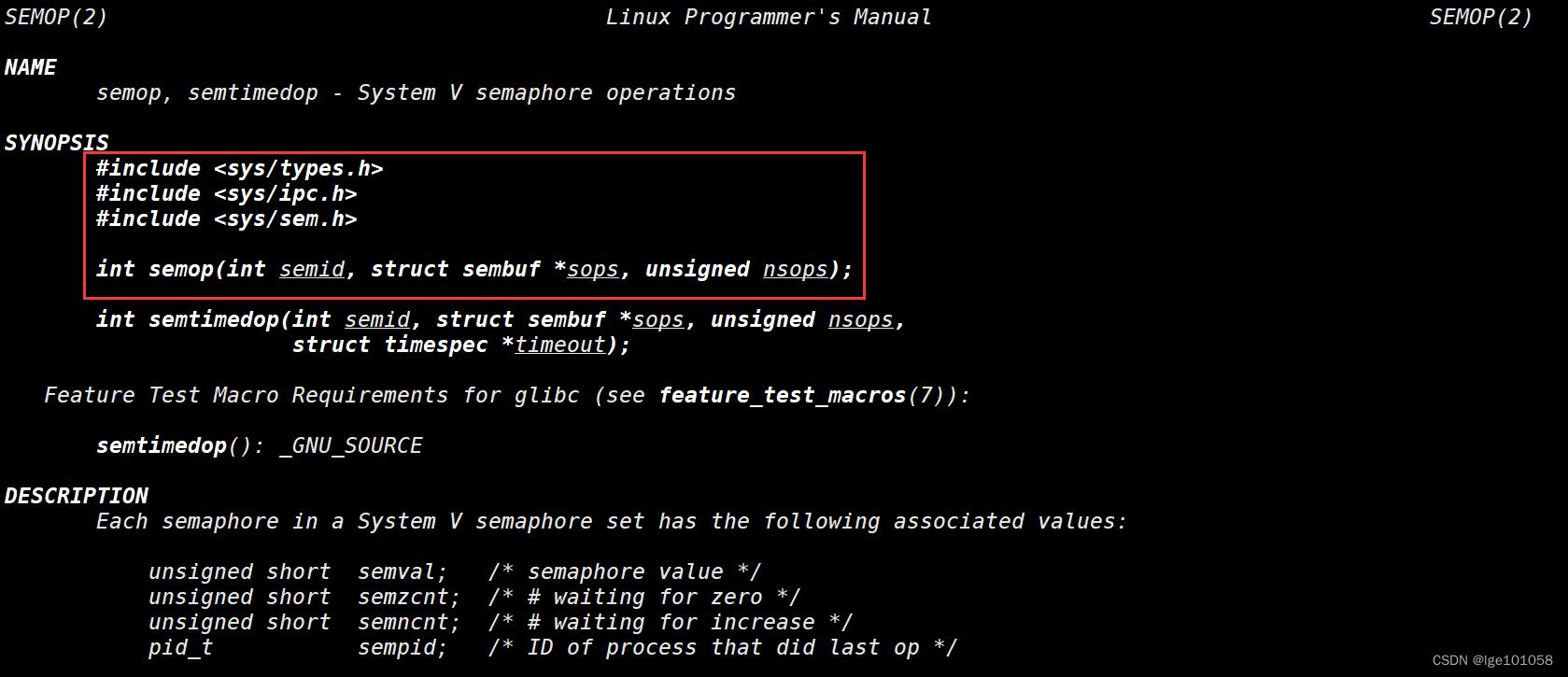
【Linux】进程间通信_4
文章目录 七、进程间通信1. 进程间通信分类systeam V共享内存消息队列信号量 未完待续 七、进程间通信
1. 进程间通信分类
systeam V共享内存
进程间通信的本质就是让不同进程看到同一份资源。而systeam V是通过让不同的进程经过页表映射到同一块内存空间(操作系…

强化学习-RLHF-PPO入门
一、定义
强化学习微调分类RM模型 数据集格式训练流程Reward 模型训练流程(分类模型,积极为1,消极为0) AutoModelForSequenceClassificationReward 模型训练案例PPO模型训练流程PPO模型训练案例
二、实现 强化学习微调分类 RLHF:基于人类反馈对语言模型…

深度学习 —— 1.单一神经元
深度学习初级课程
1.单一神经元2.深度神经网络3.随机梯度下降法4.过拟合和欠拟合5.剪枝、批量标准化6.二分类 前言 本套课程仍为 kaggle 课程《Intro to Deep Learning》,仍按之前《机器学习》系列课程模式进行。前一系列《Keras入门教程》内容,与本系列…
eNSP中三层交换机的配置和使用
一、拓扑图
1.新建拓扑图 2.PC端配置
PC1: PC2: 二、基本命令配置
1.S1配置
<Huawei>system-view
[Huawei]sysname S1
[S1]vlan 10 //在交换机 S1 上创建 VLAN 10
[S1-vlan10]vlan 20 // 在交换机 S1 上创建 VLAN 20
[S1-vlan20]quit //退出 VLAN 配置…
基于JSP的在线教育资源管理系统
开头语:
你好呀,我是计算机学长猫哥!如果你对在线教育资源管理系统感兴趣或者有相关需求,欢迎在文末找到我的联系方式。
开发语言:Java
数据库:MySQL
技术:JSP技术
工具:IDE、N…

基于Java仓储出入库管理系统设计和实现(源码+LW+调试文档+讲解等)
💗博主介绍:✌全网粉丝10W,CSDN作者、博客专家、全栈领域优质创作者,博客之星、平台优质作者、专注于Java、小程序技术领域和毕业项目实战✌💗 🌟文末获取源码数据库🌟感兴趣的可以先收藏起来,还…
代码随想录第34天|贪心算法
59.合并区间 class Solution {
public:struct cmp{bool operator()(vector<int>& a, vector<int>& b) {return a[0] < b[0];}};vector<vector<int>> merge(vector<vector<int>>& intervals) {if (intervals.size() 1)retu…