提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
文章目录
- 前言
- 一、查看雷达数据的 frame_id
- 1. 查看雷达数据的话题
- 2. 查看数据的frame_id
- 二、可视化雷达数据
- 总结
前言
RViz(ROS Visualization)是机器人操作系统(ROS)中的一个强大可视化工具,用于在开发和调试机器人应用程序时展示传感器数据、机器人模型及其状态信息。它支持多种数据类型,包括激光扫描、点云、地图、图像和机器人状态等。开发者可以通过RViz实时查看机器人感知的环境,调试导航、感知和控制算法。RViz的主要作用包括提供直观的3D界面,让开发者更容易理解和分析机器人所处环境及其行为;支持多种插件,用户可以根据需求自定义和扩展功能;方便调试,通过实时显示传感器数据和算法输出,帮助发现和解决问题;集成性强,可以与ROS生态系统中的其他工具无缝协作。总之,RViz是ROS开发过程中不可或缺的重要工具,极大地提高了开发效率和调试效果。
一、查看雷达数据的 frame_id
1. 查看雷达数据的话题
开启雷达的驱动之后,终端输入:
rostopic list
列出ros话题如下所示:
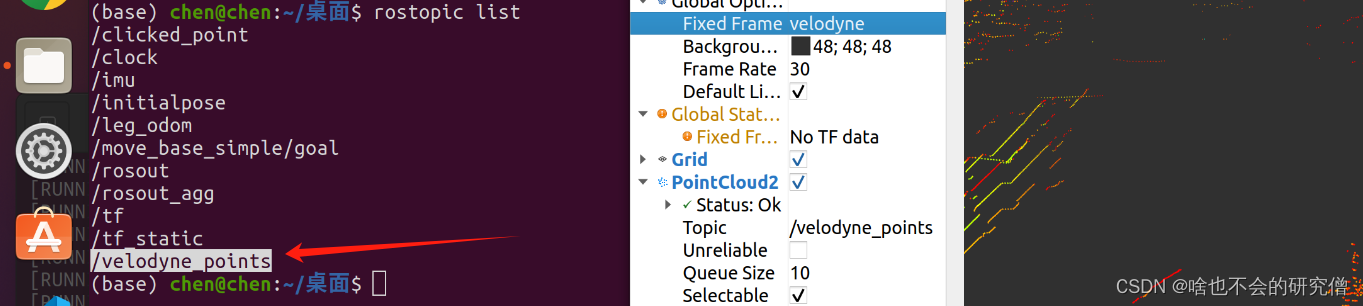
我的是雷达数据对应的话题为/velodyne_points,使用自己查到的即可。
2. 查看数据的frame_id
终端输入:
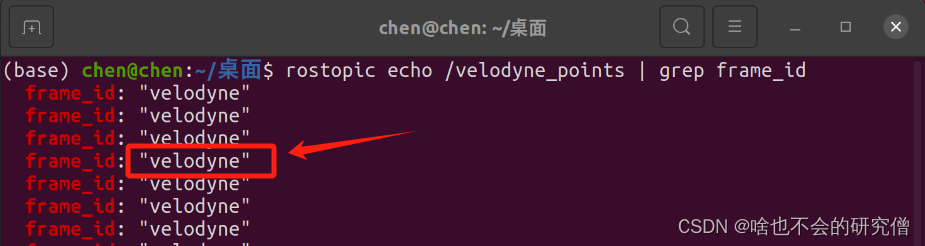
rostopic echo /velodyne_points | grep frame_id
其中,的/velodyne_points为自己的雷达数据的话题,页面如下图所示:
二、可视化雷达数据
(1) 打开rviz
终端输入:
rviz
(2) 设置rviz显示的数据
具体的步骤如下:
点击Add —— By topic —— 选择可视化数据话题 —— 点击OK

(3) 设置rviz显示的数据的Fixed_Frame
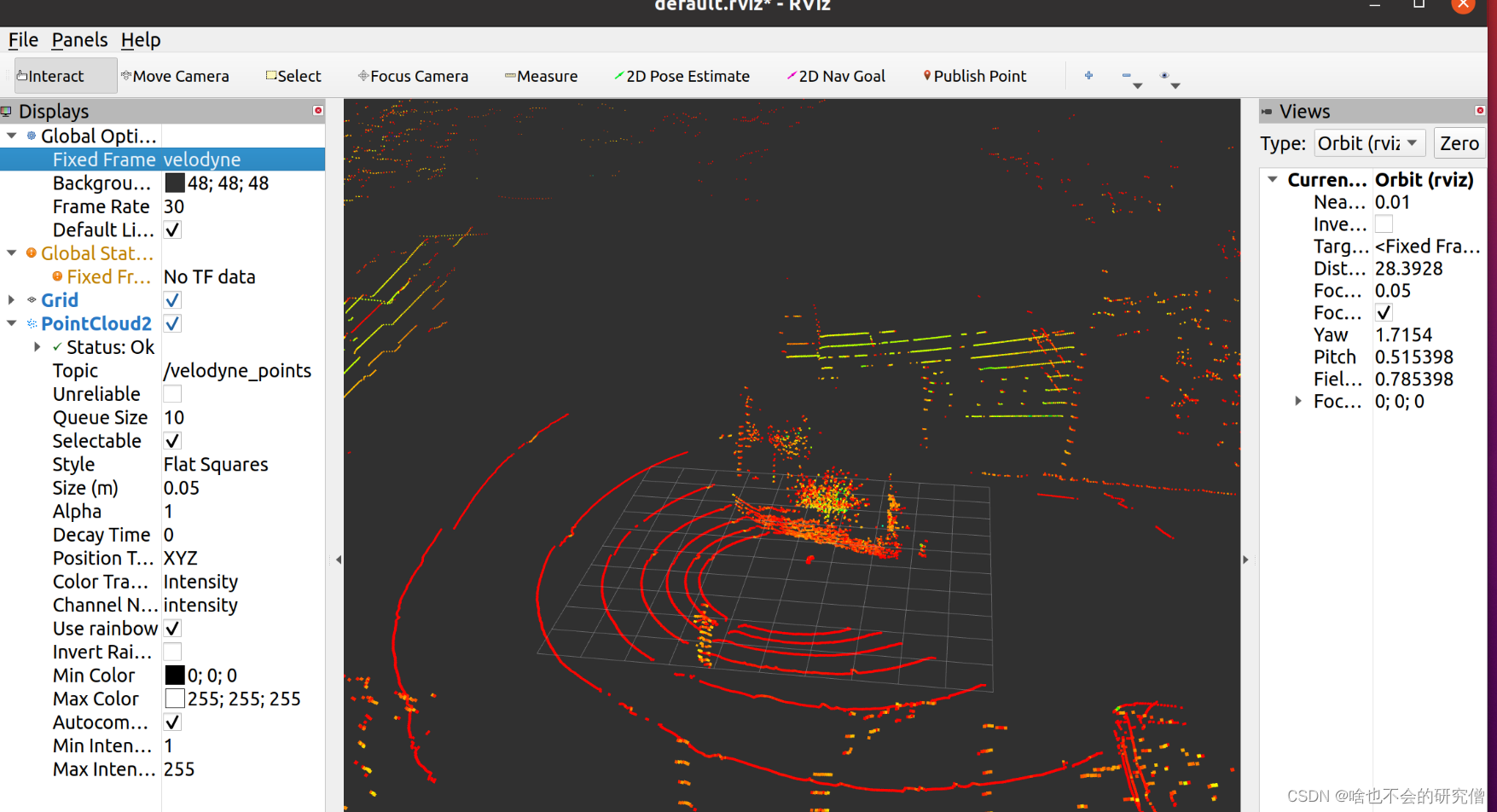
将rviz中的Fixed_Frame参数修改为自己雷达数据的frame_id,也就是上述步骤打印出来的frame_id,如下图所示:

(4) 最后,完成上述的配置之后,可视化的效果如下:
参考:
https://blog.csdn.net/m0_68312479/article/details/126445975?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522171819944316800226540116%2522%252C%2522scm%2522%253A%252220140713.130102334.pc%255Fall.%2522%257D&request_id=171819944316800226540116&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2allfirst_rank_ecpm_v1~rank_v31_ecpm-10-126445975-null-null.142v100pc_search_result_base4&utm_term=rviz%E5%8F%AF%E8%A7%86%E5%8C%96%E9%9B%B7%E8%BE%BE%E7%82%B9%E4%BA%91%E7%9A%84%E6%95%B0%E6%8D%AE&spm=1018.2226.3001.4187
总结
以上就是如何在ubuntu中利用ros自带的rviz工具实时可视化雷达点云的数据的全部流程,有什么问题可以评论区留言交流!