0.实现效果
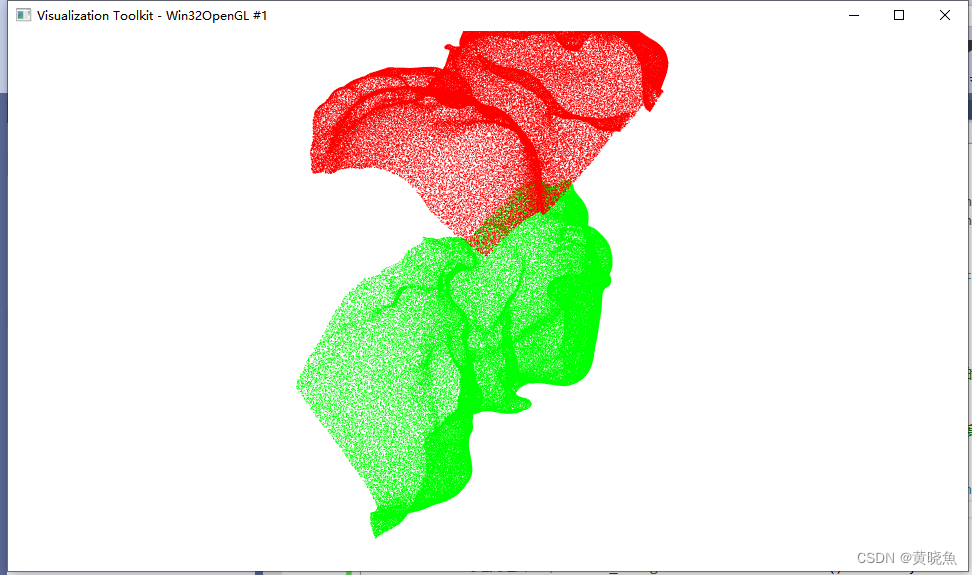
原始点云
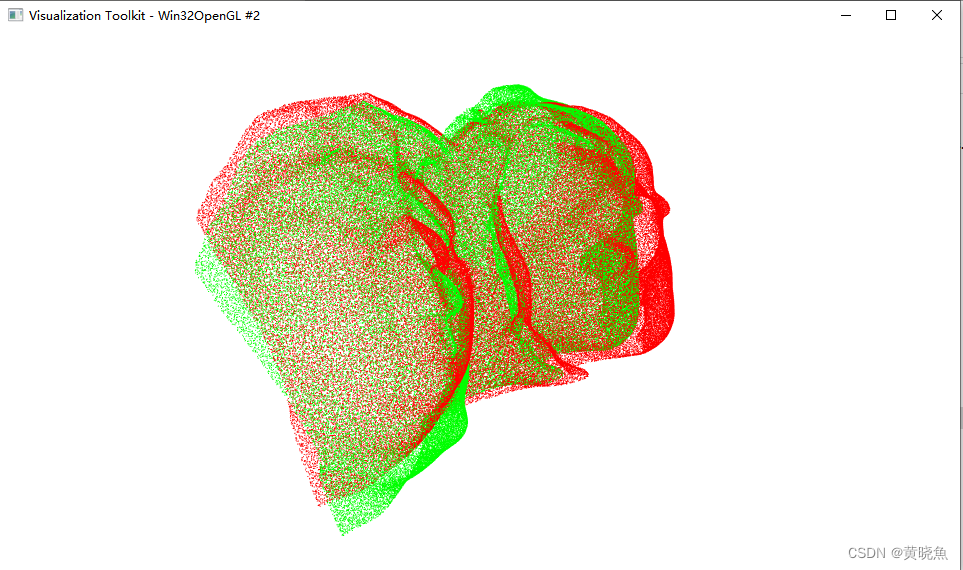
粗配准后的点云
1.算法原理
RANSAC(Random Sample Consensus)算法,更常见的是RANSAC的变种RANSAC-ICP(Iterative Closest Point)或RANSAC结合其他点云配准技术,用于实现两个点云或3D模型之间的粗配准。在这里,我将简要描述一个使用RANSAC算法进行粗配准的基本步骤。
- 随机采样:
-
- 从源点云(Source Cloud)中随机选择三个非共线的点。
- 这三个点构成一个刚性变换(旋转和平移)的候选模型。
- 确定对应点:
-
- 在目标点云(Target Cloud)中,找到与源点云中的这三个点最近的对应点。
- 计算这些对应点之间的距离或某种相似度度量。
- 评估模型:
-
- 计算由这三个对应点确定的变换矩阵(旋转矩阵和平移向量)。
- 使用这个变换矩阵&#