一、主函数
官方开源的代码提供了四个主函数,其中eval_pair.cpp和eval_top1.cpp是一组,分别用于计算两帧的相似度分数以及一帧点云在所有的51帧点云中相似度最高的25帧的相似度分数。eval_seq.cpp是在eval_top1.cpp的基础上,给了一堆序列,遍历序列中的每一帧点云并输出与之相似度足够高的25帧点云的相似度分数。eval_angle.cpp这个文件比较迷,readme里面也没有提,代码里面提到的那几个config文件开源代码也没有给出,从代码内容来看,更像是在eval_pair.cpp的基础上,计算了好多帧对的位姿变换。
主函数的具体操作基本都是类似的,先初始化config对象读取配置文件,同时利用这个配置文件初始化ssc对象,之后根据不同的需求,调用重载了许多次的ssc对象里面的getScore函数,进行相似度分数的计算。因此整个ssc算法其实都在ssc对象中实现。
二、ssc.cpp
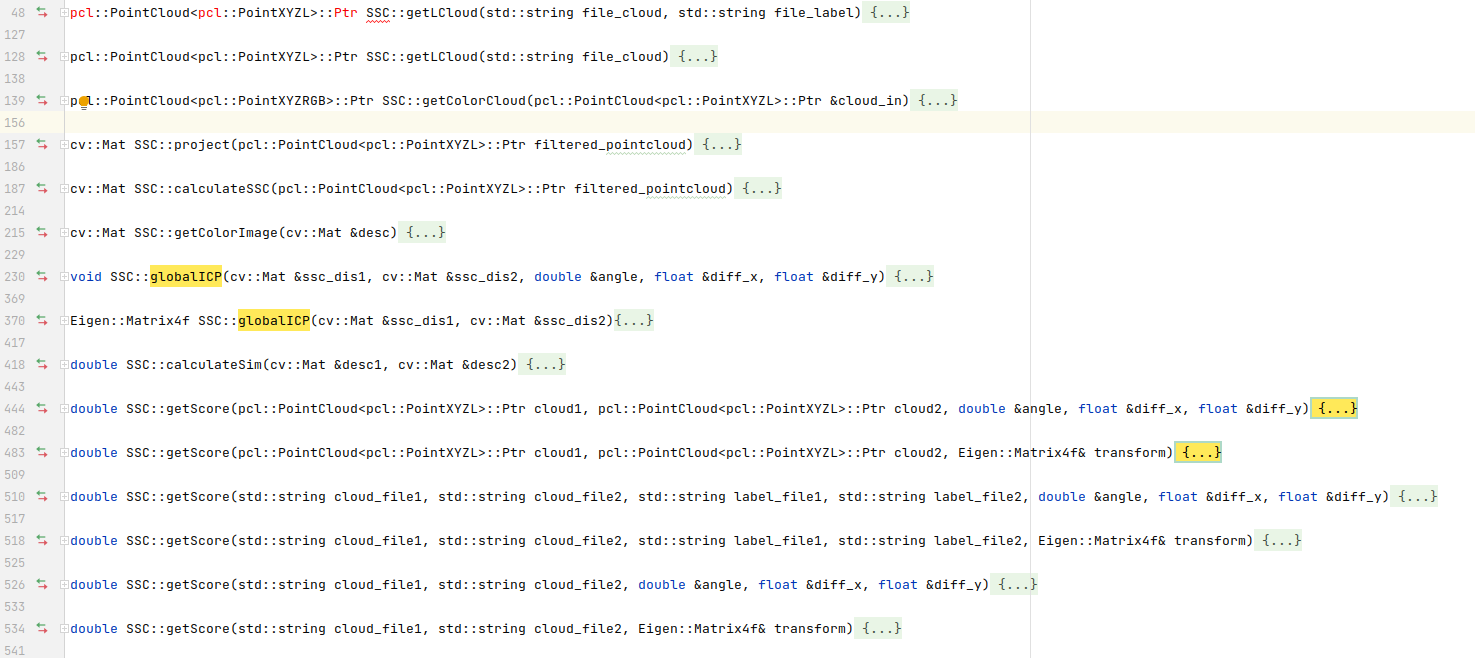
算法的实现基本都在这个文件中,文件的结构本身不复杂,除了构造函数和析构函数,还有三个形式的读取点云函数、投影函数、计算ssc描述子的函数、两个形式的全局ICP函数、计算相似度的函数以及六个形式的计算相似度分数的函数。
getScore()
根据主函数的执行顺序,这里我们也从getScore函数开始。从重载函数的形式看,六个getScore函数传入的参数本质上都是一样的:两帧点云、两帧点云的语义以及变换矩阵,不同之处在于传入的形式,一二个函数传入的是XYZL形式的点云,这是pcl库中一个点云形式,L表示的是label,相当于直接把语义信息存储了进去,三四个函数这是传入了点云文件的路径和语义推理结果的路径,在函数内部分别读取两个文件,最后两个函数则是直接读取标记过语义的点云文件。从执行的路径来看,最后面四个函数都是在调整文件格式之后,转而调用了前面两个函数,所以这里我们主要看第一个形式的getScore函数。
project()
进入函数后首先对位姿变化的量进行初始化,同时利用project函数对标记过语义的点云进行投影。与其叫做投影,其实更多地是在做格式的转换。函数传入下采样后的点云filtered_pointcloud,之后遍历点云中的每个点,对类别标记为13、14、16、18、19的这五类点进行点云格式的转换。查看配置文件可以发现,选择的这五类对应的是building、fence、trunk、pole以及traffic-sign,而没有选择
![[经验] candy是什么意思英语翻译 #笔记#其他#职场发展](https://img-home.csdnimg.cn/images/20230724024159.png?origin_url=https%3A%2F%2Fwww.hao123rr.com%2Fzb_users%2Fupload%2F2023%2F04%2F202304091681038724651485.jpg&pos_id=xMdXmMK8)




![[职场] 公务员的利弊分析 #知识分享#经验分享#其他](https://img-blog.csdnimg.cn/img_convert/5bcd74cd751052a1172c6b8f5a4cf29a.png)