6 串口通信
[toc]
注:笔记主要参考B站江科大自化协教学视频“51单片机入门教程-2020版 程序全程纯手打 从零开始入门”。
6.1 串口通信原理
串口是一种应用十分广泛的通讯接口,串口成本低、容易使用、通信线路简单,可实现两个设备的互相通信。单片机的串口可以使单片机与单片机、单片机与电脑、单片机与各式各样的模块互相通信,极大的扩展了单片机的应用范围,增强了单片机系统的硬件实力。51单片机内部自带UART(Universal Asynchronous Receiver Transmitter,通用异步收发器),可实现单片机的串口通信。
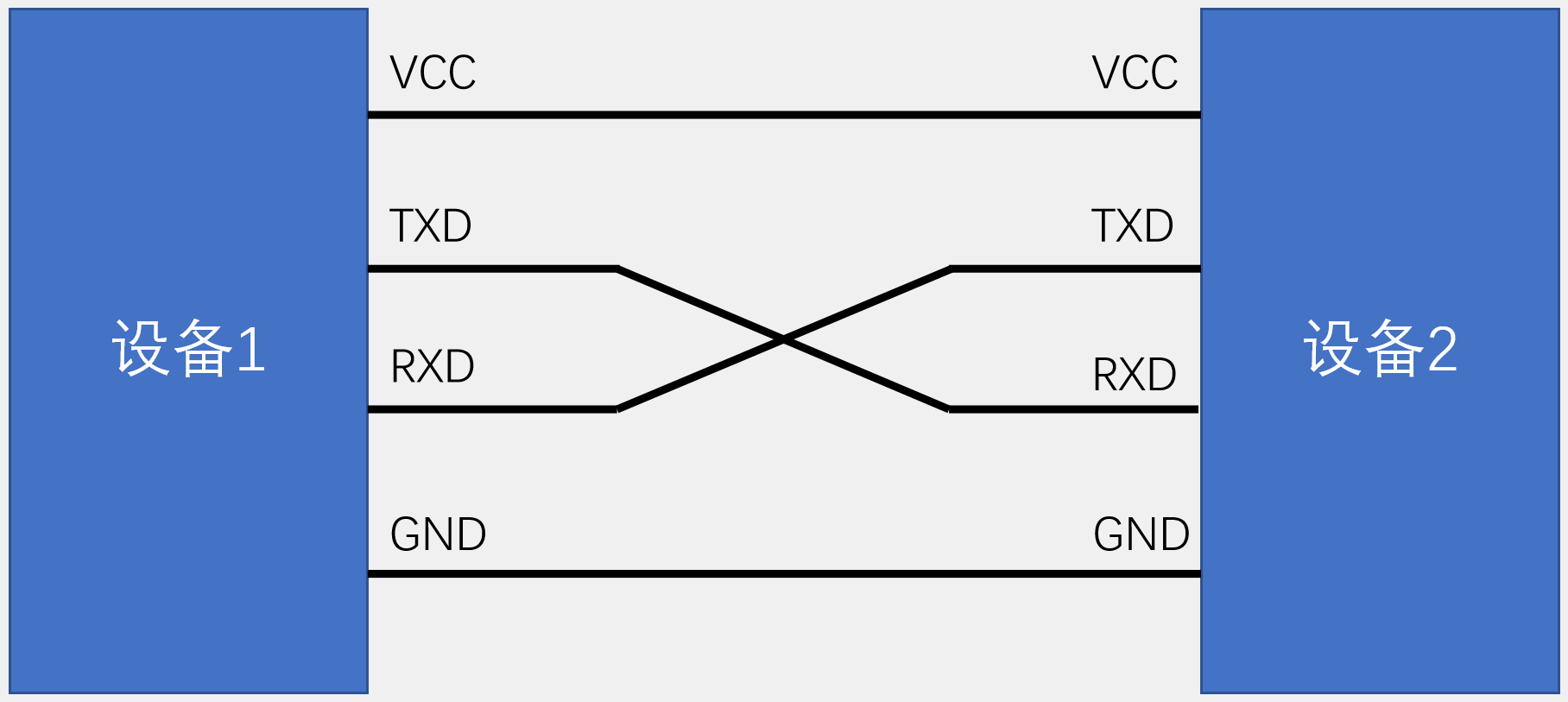
上图所示的简单双向串口通信,有两根交叉连接的通信线(发送端TXD和接收端RXD)。当只需单向的数据传输时,可以只接一根通信线。当电平标准不一致时,需要加电平转换芯片。电平标准是数据1和数据0的表达方式,是传输线缆中人为规定的电压与数据的对应关系,串口常用的电平标准有如下三种:
- TTL电平:+5V表示1,0V表示0。
- RS232电平:(-3V,-15V)表示1,(+3V,+15V)表示0。
- RS485电平:两线压差(+2V,+6V)表示1,(-2V,-6V)表示0(差分信号)。
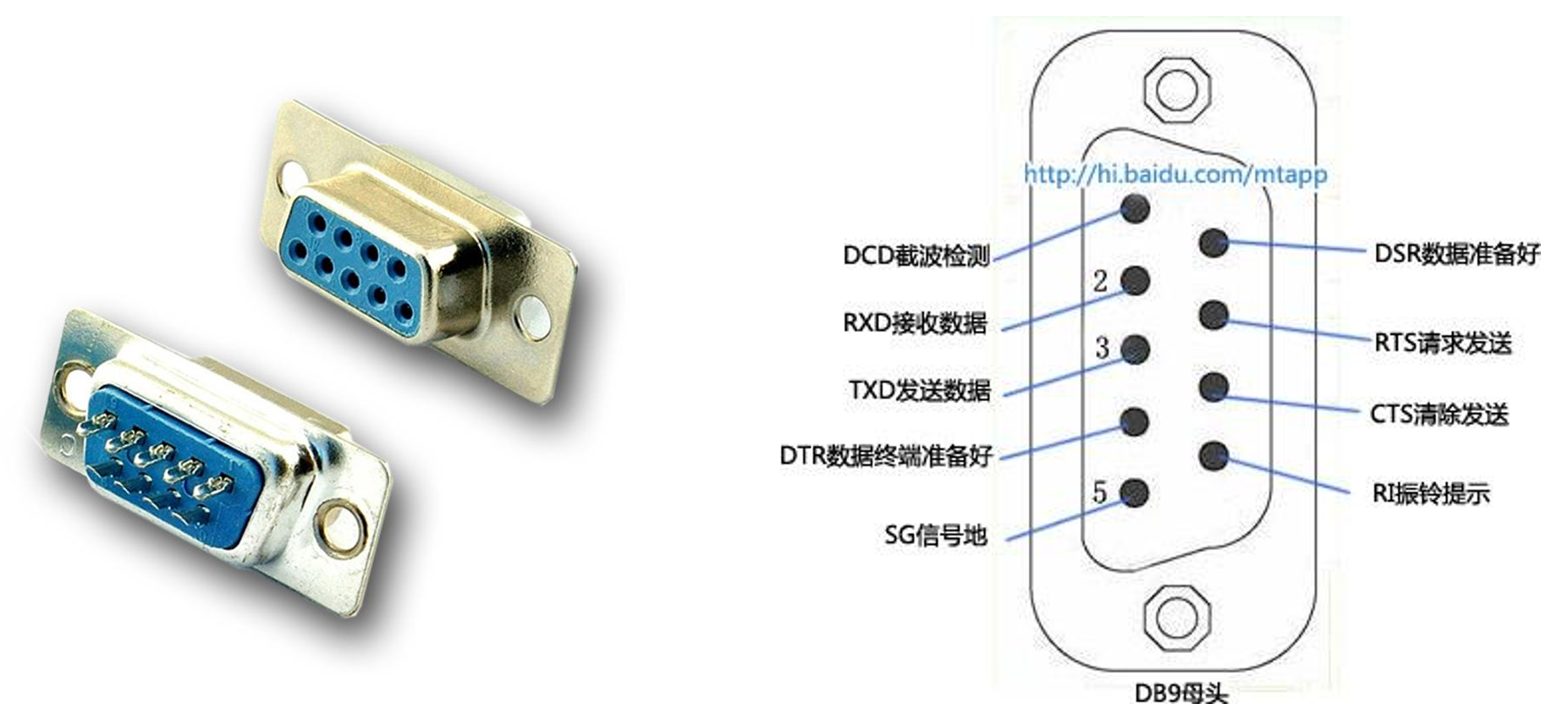

图6-2是串口通信最经典的DB9接口(单片机不支持流控信号),使用RS232电平标准,但是由于其体积大、速率慢等原因,逐渐的被笔记本电脑领域所淘汰。而为了完成与电脑的串口通信,现代通常使用USB转串口的模块(如上图6-3左)。同时也可以看出,由于51单片机最常用的还是串口通信,所以为了配合51单片机,有许许多多的模块开始与串口通信结合起来。
| 名称 | 引脚定义 | 通信方式 | 特点 |
|---|---|---|---|
| UART | TXD:发送端 RXD:接收端 GND:公共(参考)地 | 全双工、异步 | 点对点通信 |
| I²C | SCL:同步时钟 SDA:数据输入/输出端 | 半双工、同步 | 可挂载多个设备 |
| SPI | SCLK:同步时钟 MISO:主机输入,从机输出 MOSI:主机输出,从机输入 CS:从设备使能信号,由主设备控制。 | 全双工、同步 | 可挂载多个设备 |
| 1-Wire | DQ:发送/接收端 | 半双工、异步 | 可挂载多个设备 |
| 此外还有CAN(差分传输)、USB等 | |||
对于上表的注释:
- 全双工:通信双方可以在同一时刻互相传输数据
半双工:通信双方可以互相传输数据,但必须分时复用一根数据线
单工:通信只能有一方发送到另一方,不能反向传输- 异步:通信双方各自约定通信速率
同步:通信双方靠一根时钟线来约定通信速率- 总线:连接各个设备的数据传输线路(类似于一条马路,把路边各住户连接起来,使住户可以相互交流)
- TXD全称:transmit external data。
在开发板上,I²C用于与EEPROM(AIM23A10)通信,SPI改编后与RTC芯片(DS1302通信),1-Wire用于与温度传感器(DS18B20)通信。CAN总线常用语汽车控制领域,USB协议则在日常生活中最常见。STC89C52只有1个UART(如下图P3.0/P3.1),这个UART有四种工作模式:
模式0:同步移位寄存器
模式1:8位UART,波特率可变(常用)
模式2:9位UART,波特率固定
模式3:9位UART,波特率可变
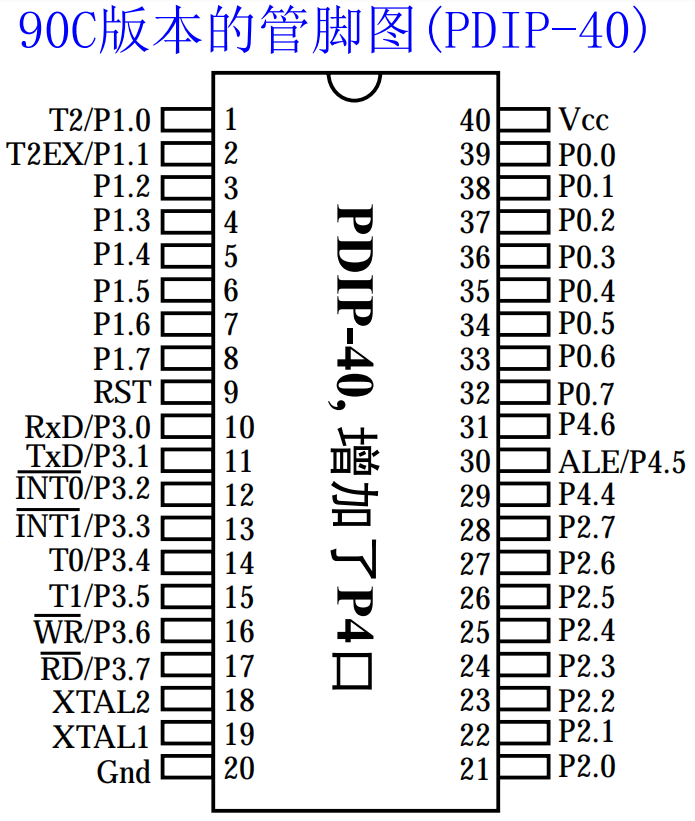
图6-4 STC89C52上的串口示意图
下面图6-5给出串口通信在单个通信线上的时序图,上面发送和接收各数据位的间隔时间就是 波特率,表明了串口通信的速率。可以看到主要包含 4个部分:
- 起始位:拉低信号,表明开始传输8bit的数据。
- 数据位:每次传输8bit的数据,注意先传输低位LSB。
- 检验位(选填):只出现在9位UART的最后一位,用于数据验证。
- 停止位:拉高信号,用于数据帧间隔。
注意波特率只能为:4800、9600、115200等约定好的值。
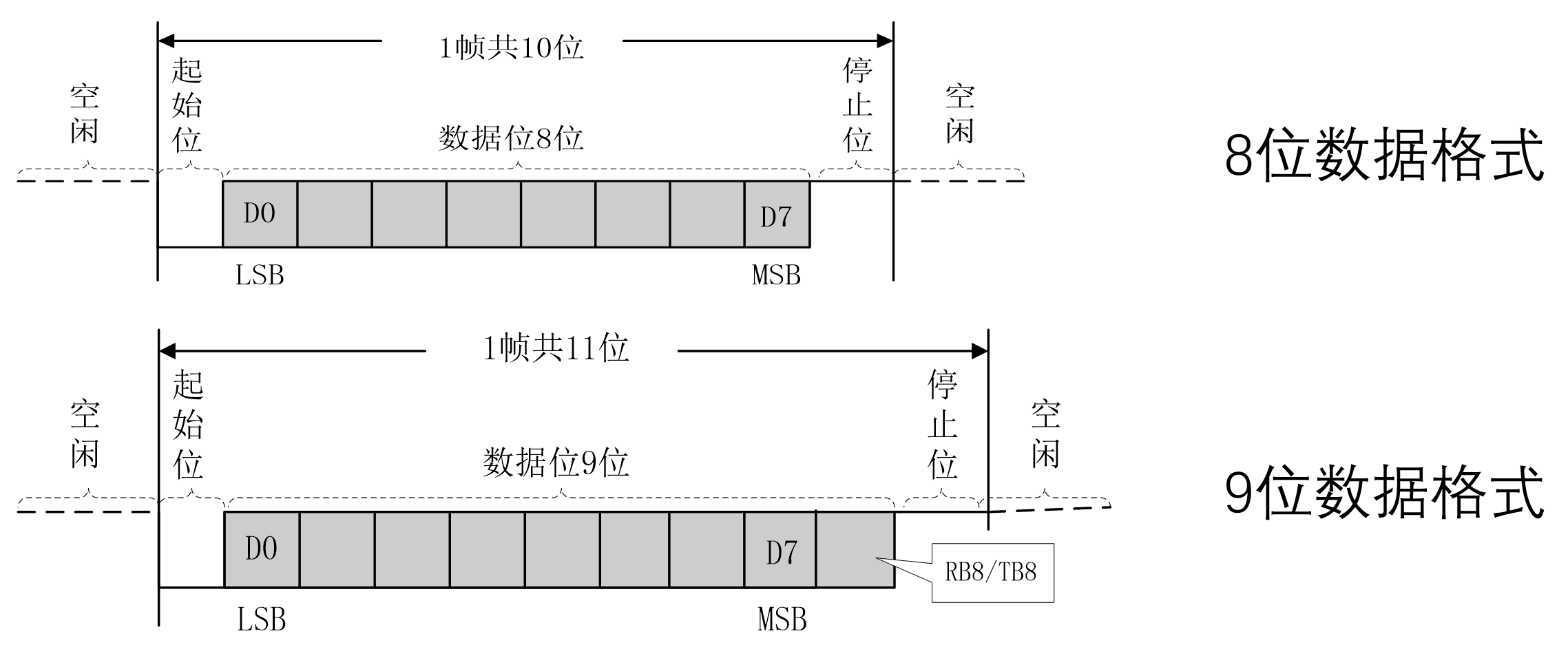
图6-5 串口时序图
由于器件手册中给出的串口模式图过于复杂,包含了许多不利于学习理解的信号。所以下图给出了单片机内部的串口简化模式图。可以看到,最关键就是SBUF(存储发送和接收的数据)、RI(接收完毕中断)、TI(发送完毕的中断)这三个信号,甚至于RXD、TXD都不用我们手动配置,只需要关心那两个中断请求就好。
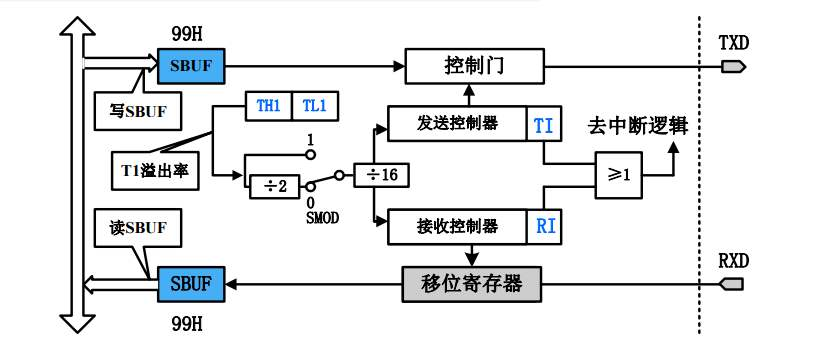
图6-6 串口模式图
- SBUF:串口数据缓存寄存器,物理上是两个独立的寄存器,但占用相同的地址。对于MCU来说,发送缓冲器只能写入,接收缓冲器只能读出,所以 可以同时操作。
- 根据上面的图可以发现,串口发送/接收所需要的 波特率都只能由定时器T1来提供!!且T1工作在模式3(8位自动重装)。
- T1溢出率意思为定时器T1的溢出速率,可以SBUF的1bit数据保持时间与波特率一致。
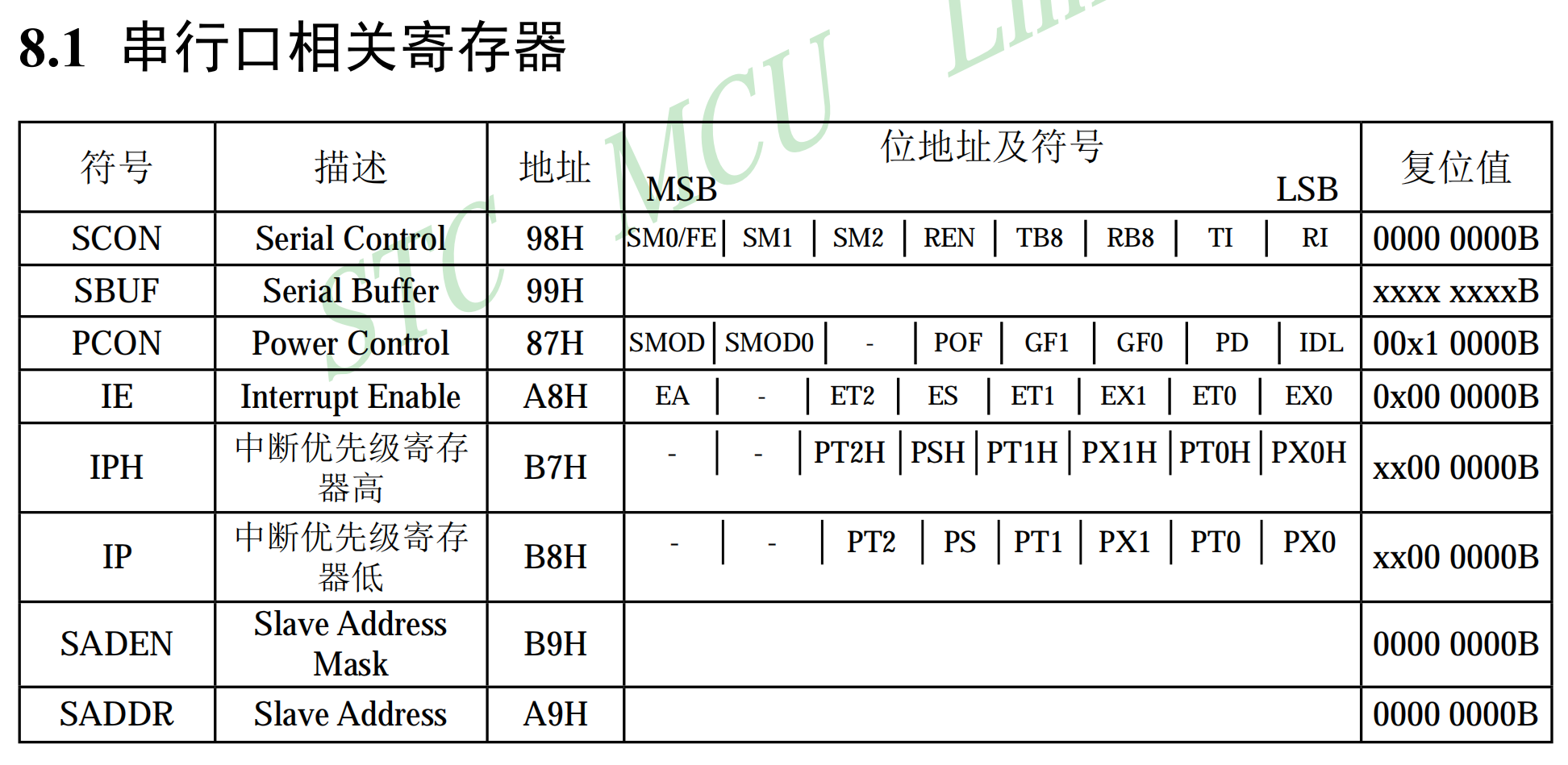
图6-7 串口相关寄存器
- 串行控制寄存器SCON(可位寻址):选择串行通信的工作方式和某些控制功能。
SM0/FE:PCON中的SMOD0选择其为SM0时,与下面的SM1共同选择串口工作模式([SM0,SM1]=[0,1]模式1);PCON中的SMOD0选择其为FE时,检测到帧错误则拉高,且必须由软件归零。
SM2:允许方式2/3多机通信。方式1中,SM2=1则接收到有效的停止位RI才拉高。
REN:允许/禁止串行接收控制位(1/0)。默认禁止。
TB8:方式2/3中发送的第9位数据,软件控制。
RB8:方式2/3要接收的第9位数据。方式
TI:表明发送完毕的中断请求,停止位开始的发送时拉高,必须软件复位。
RI:表明接收完毕的中断请求。只有模式0需要软件置位。- 波特率选择特殊功能寄存器PCON(不可位寻址):
SMOD:波特率加倍控制位,软件置位。SMOD=1,工作模式1、2、3波特率加倍;SMOD=0,波特率不加倍。
SMOD0:帧错误检测有效控制位。决定了SCON 中的SM0/FE被选为FE(帧错误检测)还是SM0(0/1)。- IE、IPH、IP:
由于单片机串口通信用到了RI、TI两个中断,所以还需要配置 串口通信中断源 中断寄存器。可以参考上一节。
6.2 实验:串口向电脑发送数据
需求:单片机不断每秒向电脑发送一个8位递增数字(也可以直接发送单个字符,如’A’)。
图6-8 “串口发送连续数字”代码调用关系
代码展示:
- main.c
#include <REGX52.H>
#include "Delay.h"
#include "UART.h"
void main(){
unsigned char num = 0x00; // 要发送的变量
UART_Init(); // 串口初始化
while(1){
UART_SendByte(num);
Delay(1000); // 软件延时,防止打乱定时器的操作
num += 1;
}
}
- UART.h
#ifndef __UART_H__
#define __UART_H__
void UART_Init(); // 串口初始化
void UART_SendByte(unsigned char Byte); // 串口发送1Byte数据
#endif
- UART.c
#include <REGX52.H>
/**
* @brief :串口通信初始化,4800bps@11.0592MHz
* @param :无
* @retval :无
*/
void UART_Init(){
SCON = 0x40; // 串口控制寄存器,暂时接收不使能
PCON &= 0x7f; // 波特率选择特殊功能寄存器
// 发送数据不需要开启中断,接收数据才需要
// 下面配置定时器,用于波特率设置
// 注:串口只能用定时器T1(8位自动重装模式)
TMOD&=0x0F;TMOD|=0x20; //设置定时器模式
TL1 = 0x66; //设置定时初始值
TH1 = 0xFA; //设置定时初始值
ET1 = 0; //禁止定时器中断,只要有溢出就可以生成波特率
TR1 = 1; //定时器1开始计时
}
/**
* @brief :通过串口发送8位数据
* @param :需要发送的8位数据
* @retval :无。但函数会直到该字节发送完成才返回。
*/
void UART_SendByte(unsigned char Byte){
SBUF = Byte;
while(TI==0); // 等待发送完毕
TI = 0; // 软件复位
}
- Delay.h
#ifndef __DEALY_H_
#define __DEALY_H_
// 延时cycles ms,晶振@11.0592MHz
void Delay(unsigned int cycles){
unsigned char i, j;
do{
i = 2;
j = 199;
do{
while (--j);
}while (--i);
}while(--cycles);
}
#endif
6.3 实验:电脑通过串口控制LED
需求:电脑向单片机发送一个8位数字,用于控制8个LED的点亮情况,同时单片机将接收到的数据返回给电脑。
本节实验与上一个实验最大的区别就是,串口初始化的过程中添加了允许串口中断。下面是代码展示:
- main.c
#include <REGX52.H>
#include "UART.h"
void main(){
UART_Init(); // 串口初始化
while(1){}
}
// 串口接收中断子函数
// 注意发送和接收两种中断都会进入到这个子函数中来
void UART_Routine() interrupt 4{
if(RI==1){
P2 = ~SBUF; // 存储接收到的字节
RI = 0; // 软件清空接收完成标志
UART_SendByte(SBUF);
}
}
- UART.h
#ifndef __UART_H__
#define __UART_H__
void UART_Init(); // 串口初始化
void UART_SendByte(unsigned char Byte); // 串口发送1Byte数据
#endif
- UART.c
#include <REGX52.H>
/**
* @brief :串口通信初始化,4800bps@11.0592MHz
* @param :无
* @retval :无
*/
void UART_Init(){
SCON = 0x50; // 串口控制寄存器,接收使能
PCON &= 0x7f; // 波特率选择特殊功能寄存器
// 接收数据需要串口中断
EA = 1; ES = 1; // 允许全局中断、串口中断
// 下面配置定时器,用于波特率设置
// 注:串口只能用定时器T1(8位自动重装模式)
TMOD&=0x0F;TMOD|=0x20; //设置定时器模式
TL1 = 0xFA; //设置定时初始值
TH1 = 0xFA; //设置定时初始值
ET1 = 0; //禁止定时器中断,只要有溢出就可以生成波特率
TR1 = 1; //定时器1开始计时
}
/**
* @brief :通过串口发送8位数据
* @param :需要发送的8位数据
* @retval :无。但函数会直到该字节发送完成才返回。
*/
void UART_SendByte(unsigned char Byte){
SBUF = Byte;
while(TI==0); // 等待发送完毕
TI = 0; // 软件复位
}
/*串口中断函数模板
// 串口接收中断子函数
// 注意发送和接收两种中断都会进入到这个子函数中来
void UART_Routine() interrupt 4{
if(RI==1){ // 若接收到1Byte数据
}
}
*/
编程感想:
其实好几次现象不对,都是因为对于串口助手的使用不熟练。注意点的是“发送数据”,而不是“发送回车”;另外发送和接收的模式“文本模式”/“HEX模式”要匹配上。