目录
1.算法运行效果图预览
2.算法运行软件版本
3.部分核心程序
4.算法理论概述
4.1 系统架构
4.2 GoogLeNet网络简介
4.3 手势检测
5.算法完整程序工程
1.算法运行效果图预览
(完整程序运行后无水印)
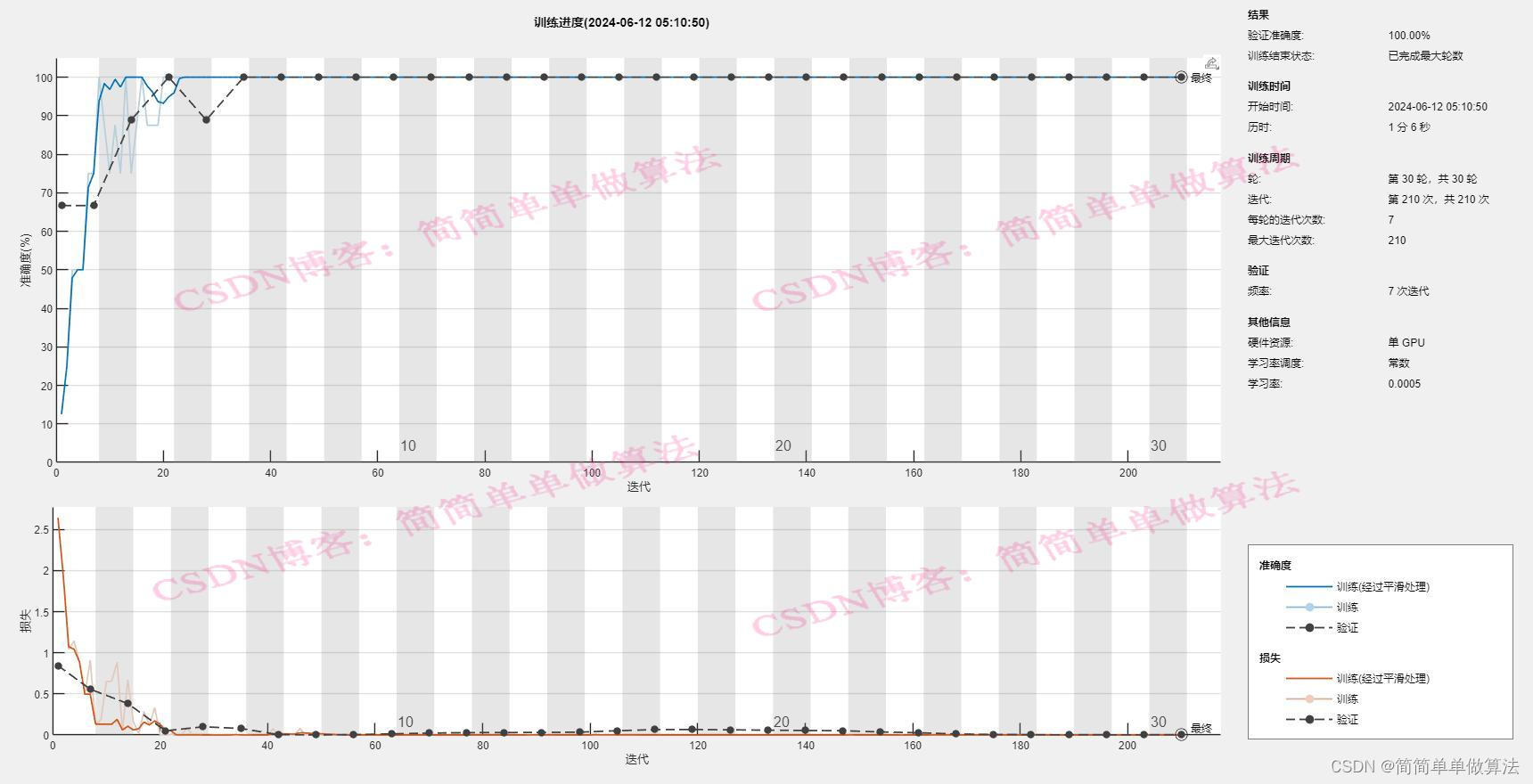
训练过程如下:
将摄像头对准手势,然后进行识别,识别结果如下:



本课题中,使用的USB摄像头为:

2.算法运行软件版本
MATLAB2022a
3.部分核心程序
程序中包括MATLAB读取摄像头的配置方法,摄像头配置工具箱安装文件。
.............................................................
vid = videoinput('winvideo',1,'YUY2_640x480');%设置视频对象
set(vid, 'ReturnedColorSpace', 'rgb');%将视频对象设置为始终返回rgb图像:
triggerconfig(vid,'manual');
start(vid)%初始化帧计数器和fps变量
counter = 0;
fps = 0;
runtime = 100;%程序运行时间
h = figure(1);
tic
timeTracker = toc;
tmps=[];
tmps2=[];
while toc < runtime
counter = counter + 1;
% Get a new frame from the camera
img = getsnapshot(vid);
%进行识别
[R,C,K] = size(img);
I2 = imresize(img,[224,224]);
[Predicted_Label, Probability] = classify(net, I2);
Predicted_Label
imshow(img, []);
end
148
4.算法理论概述
深度学习是一种机器学习技术,它通过构建多层神经网络来模拟人脑的神经元之间的连接,实现对数据的学习和特征提取。卷积神经网络(CNN)是深度学习中的一种重要结构,特别适用于图像识别任务。它通过卷积层、池化层和全连接层来逐层提取和学习图像的特征。
基于GoogLeNet深度学习网络的USB摄像头实时视频采集与手势检测识别是一个集成了图像处理、计算机视觉和深度学习技术的复杂系统。这个系统从视频流的实时采集到手势的识别,涵盖了多个技术环节。
4.1 系统架构
整个系统大致可分为以下几个步骤:
- 视频采集:通过USB摄像头采集实时视频流。
- 手势检测:利用GoogLeNet或其他深度学习网络进行图像分割,识别出可能包含手势的区域。
- 手势识别:对检测到的手势区域进一步分析,识别出手势类别。
- 决策与反馈:根据识别结果做出相应动作或反馈信息。
4.2 GoogLeNet网络简介
GoogLeNet,又名Inception网络,是Google在2014年提出的一种深度学习模型,它通过引入Inception模块解决了深层神经网络中的计算复杂度和过拟合问题。Inception模块包含多个并行的卷积层,每个卷积层有不同的过滤器大小,这样可以在不显著增加参数数量的情况下,大幅增加网络的宽度和深度。GoogLeNet亮点如下:
1.引入了Inception结构(融合不同尺度的特征信息)
2.使用1x1的卷积核进行降维以及映射处理
3.添加两个辅助分类器帮助训练
4.丢弃全连接层,使用平均池化层(大大减少模型参数)

4.3 手势检测
手势检测通常涉及滑动窗口或基于区域提议的策略,使用GoogLeNet进行初步的区域分类。以区域提议网络(Region Proposal Network, RPN)为例,其输出一系列候选框B={b1,b2,...,bn},每个候选框带有类别分数si和位置偏移Δbi。
在识别阶段,对每个候选框bi裁剪出区域,送入GoogLeNet进行分类。GoogLeNet的输出层是一个softmax函数,给出各个类别的概率分布:

为了实现实时处理,通常采用GPU加速计算,以及轻量化模型和算法优化,如模型剪枝、量化、使用更高效的网络结构等。
基于GoogLeNet的实时视频手势识别系统,结合了深度学习的强大分类能力与计算机视觉的预处理技术,实现了从视频采集到手势识别的高效处理流程。通过不断地优化模型和算法,可以提高识别准确率和实时性,为智能家居、人机交互、远程教育等领域提供有力支持。
5.算法完整程序工程
OOOOO
OOO
O