【官方框架地址】
yolov10yolov10框架:https://github.com/THU-MIG/yolov10
bytetrack框架:https://github.com/ifzhang/ByteTrack
【算法介绍】
Yolov10与ByTetrack:目标追踪的强大组合
Yolov10和ByTetrack是两种在目标追踪领域具有显著影响力的技术。当它们结合使用时,可以显著提高目标追踪的准确性和实时性。
Yolov10是Yolov系列算法的最新版本,它在目标检测方面具有出色的性能。相较于之前的版本,Yolov10在精度和速度上都进行了优化,使其成为实时目标检测的理想选择。通过结合ByTetrack,Yolov10可以更有效地应用于目标追踪任务。
ByTetrack是一种基于轨迹匹配的目标追踪方法。它利用目标的运动信息和外观特征进行追踪,能够在复杂场景下实现稳定的目标追踪。ByTetrack的优势在于其强大的鲁棒性和适应性,即使在目标被遮挡或出现运动模糊的情况下,它仍能保持较高的追踪精度。
当Yolov10与ByTetrack结合使用时,Yolov5首先检测视频中的目标,并生成目标的初始位置和运动轨迹。然后,ByTetrack利用这些信息对目标进行精确追踪。这种结合方式既发挥了Yolov10的高检测精度,又利用了ByTetrack的高追踪精度,使得整体目标追踪效果显著提升。
综上所述,Yolov10与ByTetrack的结合为解决复杂场景下的目标追踪问题提供了新的解决方案。随着人工智能技术的不断进步,这种结合方式有望成为目标追踪领域的研究热点和发展趋势。通过进一步的研究和优化,我们可以期待这种组合在未来的目标追踪任务中发挥更大的潜力。
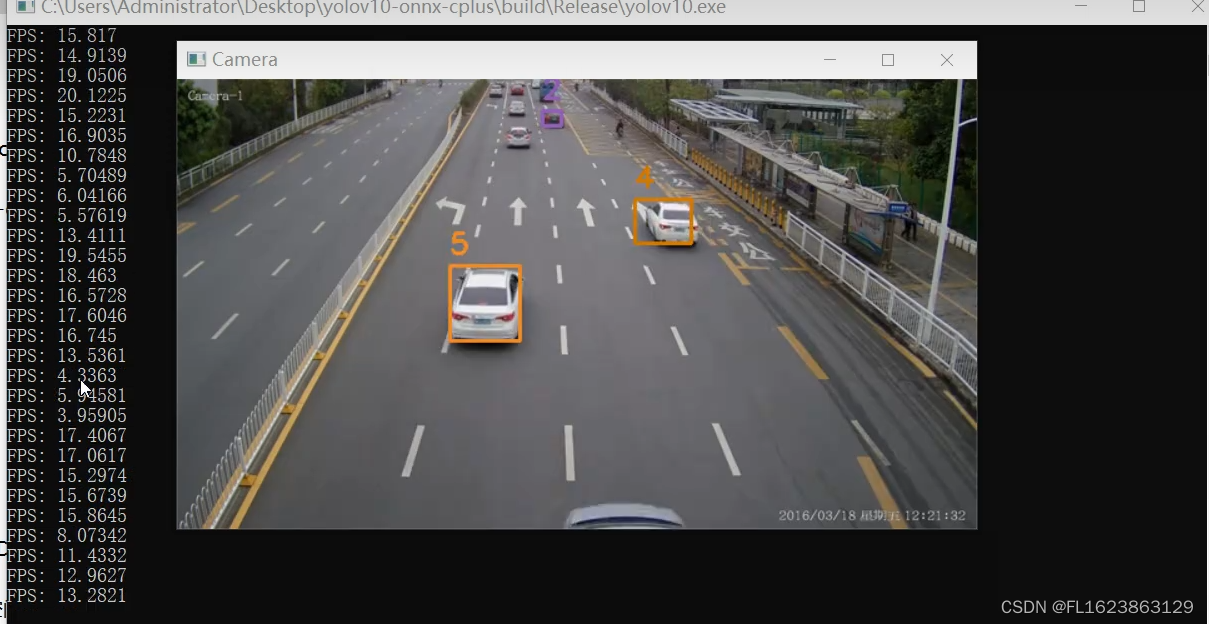
【效果展示】
【实现部分代码】
#include "YOlov10Manager.h"
#include <iostream>
#include <opencv2/opencv.hpp>
#include "BYTETracker.h"
#include <fstream>
#include <iomanip>
#include <time.h>
#include <chrono>
#include "util.h"
#include <map>
#include<vector>
#include<algorithm>
using namespace std;
using namespace cv;
void bytetrack_update(const std::vector<Detection>& res, std::vector<Object>& obj, const int& class_id ){
for (size_t i = 0; i < res.size(); i++){
try
{
if (res[i].class_id != class_id){ continue; }
obj[i].label = res[i].class_id;
obj[i].rect.x = res[i].bbox.x;
obj[i].rect.y = res[i].bbox.y;
obj[i].rect.height = res[i].bbox.height;
obj[i].rect.width = res[i].bbox.width;
obj[i].prob = res[i].confidence;
}
catch(const std::exception& e)
{
std::cerr << e.what() << '\n';
}
}
};
int main(int argc, char const *argv[])
{
std::map<int, std::vector<int>> object_id_list;
const std::vector<std::string> classNames = util::loadNames("labels.txt");
const int class_id = 2;//只想追踪的目标
std::string model_path="yolov10n.onnx";
Yolov10Manager detector(model_path);
cv::Mat frame;
std::vector <double> avg;
cv::VideoCapture cap("car.mp4");
std::chrono::time_point<std::chrono::high_resolution_clock>prev_frame_time(std::chrono::high_resolution_clock::now());
std::chrono::time_point<std::chrono::high_resolution_clock>new_frame_time;
int frame_width = cap.get(cv::CAP_PROP_FRAME_WIDTH);
int frame_height = cap.get(cv::CAP_PROP_FRAME_HEIGHT);
int fpsvideo = cap.get(cv::CAP_PROP_FPS);
cv::namedWindow("Camera", cv::WINDOW_NORMAL);
BYTETracker tracker(fpsvideo, 30);
while (cap.isOpened()) {
cap >> frame;
if (frame.empty())
{
break;
}
std::vector<Object> obj;
auto results = detector.Inference(frame);
const int num = results.size();
obj.resize(num);
bytetrack_update(results, obj, class_id);
std::vector<STrack> output_stracks = tracker.update(obj);
for (size_t i = 0; i < output_stracks.size(); i++){
std::vector<float> tlwh = output_stracks[i].tlwh;
cv::Scalar __color = tracker.get_color(output_stracks[i].track_id);
cv::putText(frame, std::to_string(output_stracks[i].track_id), cv::Point(tlwh[0], tlwh[1] - 10), cv::FONT_ITALIC, 0.75, __color, 2);
cv::rectangle(frame, cv::Rect(tlwh[0], tlwh[1], tlwh[2], tlwh[3]), __color, 2);
}
//cv::imwrite("demo.jpg", frame);
new_frame_time = std::chrono::high_resolution_clock::now();
std::chrono::duration<double> duration1(new_frame_time - prev_frame_time);
double fps = 1/duration1.count();
avg.push_back(fps);
std::cout <<"FPS: " << fps << std::endl;
prev_frame_time = new_frame_time;
cv::imshow("Camera", frame);
if (cv::waitKey(1) == 27) {
break;
}
}
cap.release();
cv::destroyAllWindows();
return 0;
}
【视频演示】
基于opencv和onnxruntime的C++版本yolov10-onnx和bytetrack追踪算法实现目标追踪_哔哩哔哩_bilibili测试环境:vs2019cmake==3.24.3opencv==4.7.0onnxruntime==1.12.0更多信息参考博文:, 视频播放量 2、弹幕量 0、点赞数 0、投硬币枚数 0、收藏人数 0、转发人数 0, 视频作者 未来自主研究中心, 作者简介 未来自主研究中心,相关视频:AI换脸真变态,绅士必备的一键启动包!,使用纯opencv部署yolov8目标检测模型onnx,基于yolov8+bytetrack实现目标追踪视频演示,易语言部署yolox的onnx模型,C语言、C++和C#的区别竟是这样,看完我瞬间懂了!,基于yolov8官方目标追踪botsort和bytetrack源码开发视频演示,基于C++版本yolov5-onnx和bytetrack追踪算法实现目标追踪,使用C++部署yolov8的onnx和bytetrack实现目标追踪,将yolov8封装成一个类几行代码完成语义分割任务,使用C#的winform部署yolov8的onnx实例分割模型![]() https://www.bilibili.com/video/BV1rZ421M77T/
https://www.bilibili.com/video/BV1rZ421M77T/
【测试环境】
opencv==4.7.0 onnxruntime==1.12.0 vs2019 cmake==3.24.3
【源码下载地址】
https://download.csdn.net/download/FL1623863129/89442051