文章目录
- 1. 问题
- 2. 方案
- 2.1 学习一个 5 * 5的滤波核
- 2.2 学习分通道的滤波核 以及 分离卷积
- 3. 分析
根据图像对学习滤波核
之前研究过根据图像对生成3Dlut, 以及生成颜色变换系数
这里我们利用图像对学习 滤波
1. 问题
遇到的问题是这样的,已知一个图像和经过邻域滤波处理后的图像,想要求解这两个图像的滤波核
2. 方案
利用最小二乘法求解
这里以一对图像为例,src为锐化前,target为锐化后
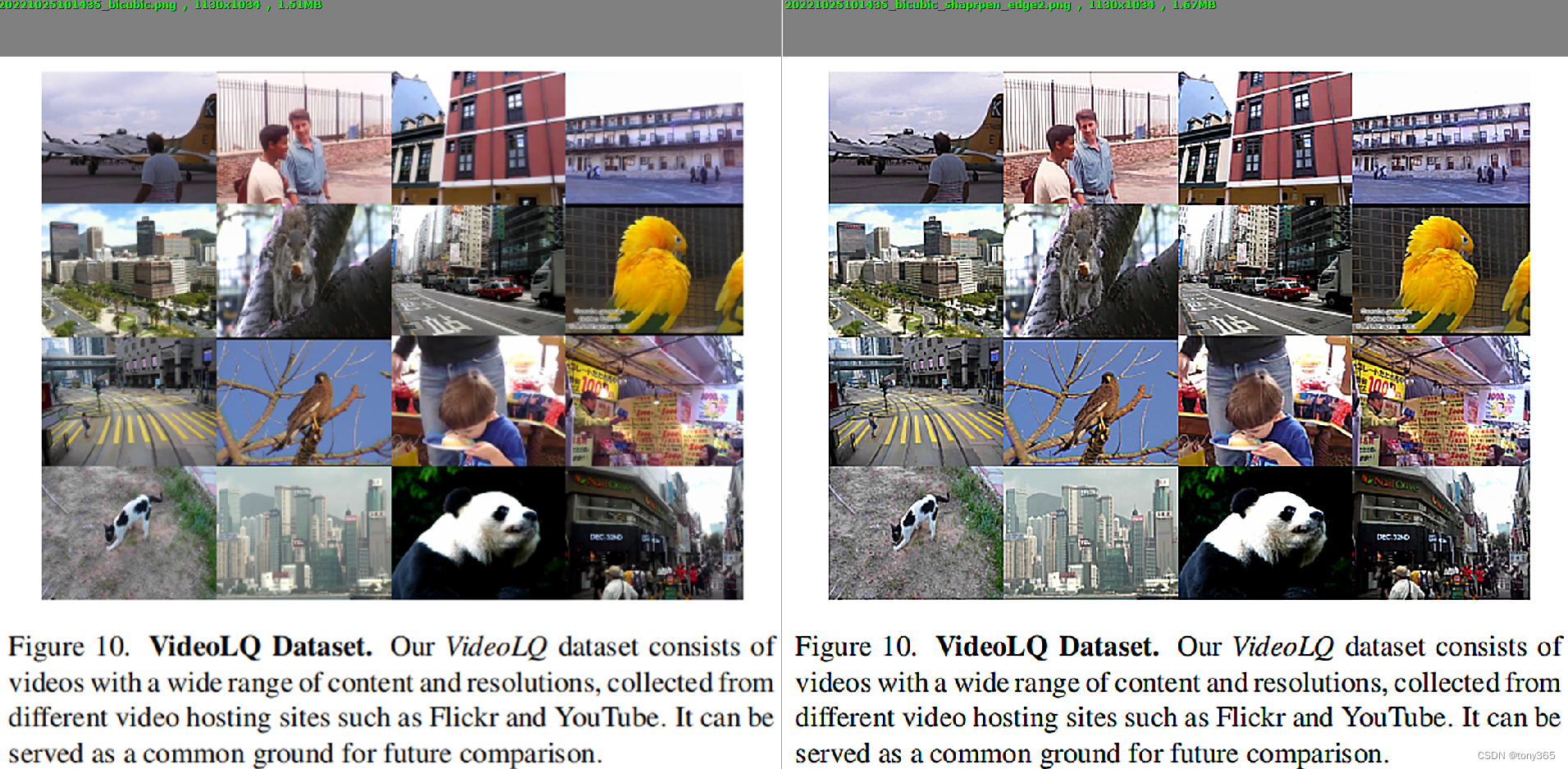
ground truth滤波核为
kernel_sharpen = np.array([[-1, -1, -1, -1, -1],
[-1, 2, 2, 2, -1],
[-1, 2, 8, 2, -1],
[-1, 2, 2, 2, -1],
[-1, -1, -1, -1, -1]])
kernel_sharpen = kernel_sharpen / np.sum(kernel_sharpen)
im2 = cv2.filter2D(im1, -1, kernel_sharpen)
2.1 学习一个 5 * 5的滤波核
原理很简单,直接利用scipy.optimize 的 least_squares函数求解
代码如下:
import cv2
import numpy as np
from scipy.optimize import least_squares
def min_fun_model_sr(x, im1, im2):
x = x.reshape([5, 5])
t = cv2.filter2D(im1, -1, x) - im2
return t.reshape(-1)
import colour
def calc_deltaE(input_sRGB, ref_sRGB):
"""TODO: calculate deltaE 2000 with ref.
:input_sRGB: target sRGB in linear domain, float [0, 1]
:ref_sRGB: ref. sRGB in linear domain, float[0, 1]
:returns: delta E 2000 between target and reference
"""
XYZ = colour.sRGB_to_XYZ(input_sRGB, apply_cctf_decoding=True)
ref_XYZ = colour.sRGB_to_XYZ(ref_sRGB, apply_cctf_decoding=True)
Lab = colour.XYZ_to_Lab(XYZ)
ref_Lab = colour.XYZ_to_Lab(ref_XYZ)
delta_E = colour.delta_E(Lab, ref_Lab)
# print('deltaE 2000: {}'.format(delta_E))
return delta_E
if __name__ == "__main__":
src = r'D:\superresolution\sharpen\learn_filter\\20221025101435_bicubic.png'
target = r'D:\superresolution\sharpen\learn_filter\\20221025101435_bicubic_shaprpen_edge2.png'
im1 = cv2.imread(src)
h, w, c = im1.shape
print(h,w,c)
im2 = cv2.imread(target)
# # generating the kernels
# kernel_sharpen = np.array([[-1, -1, -1, -1, -1],
# [-1, 2, 2, 2, -1],
# [-1, 2, 8, 2, -1],
# [-1, 2, 2, 2, -1],
# [-1, -1, -1, -1, -1]])
# kernel_sharpen = kernel_sharpen / np.sum(kernel_sharpen)
# im2 = cv2.filter2D(im1, -1, kernel_sharpen)
# im3 = cv2.resize(im1, (h//2, w//2) )
# im4 = cv2.resize(im2, (h//2, w//2) )
print(im1.shape, im2.shape)
# 先中值滤波一下,避免噪声像素的影响, 滤波后生成的3Dlut 产生的图像可能会有一丢丢的模糊效果。
# rgb = cv2.medianBlur(im3, 3).reshape(-1, 3)
# srgb = cv2.medianBlur(im4, 3).reshape(-1, 3)
rgb = im1/ 255
srgb = im2/ 255
print('lq method ret:\n')
len = 5
filter = np.random.uniform(0, 1, [len, len]).reshape(-1)
print('init filter:', filter)
res = least_squares(min_fun_model_sr, filter, bounds=(-1, 2), args=(rgb, srgb), verbose=1)
kernel = res.x.reshape(len, len)
# apply
# file = r'd.jpeg'
# im0 = cv2.imread(file)
im_t = im1 / 255
im_t1 = cv2.filter2D(im_t, -1, kernel)
a3 = np.clip(im_t1 * 255, 0, 255).astype(np.uint8)
np.set_printoptions(suppress=True)
cv2.imwrite(src[:-4] + '_filter_gen.png', a3)
np.savetxt(src[:-4] + '_filter_gen.txt', kernel, fmt='%.05f')
print(np.round(kernel, 3), np.sum(kernel))
2.2 学习分通道的滤波核 以及 分离卷积
# 实现分通道卷积
def model(kernel, im):
filtered_image2 = np.zeros_like(im)
# print(kernel.shape, im.shape)
kernel = kernel.reshape(5, 5, 3)
filtered_image2[..., 0] = ndimage.convolve(im[..., 0], kernel[..., 0], mode='nearest')
filtered_image2[..., 1] = ndimage.convolve(im[..., 1], kernel[..., 1], mode='nearest')
filtered_image2[..., 2] = ndimage.convolve(im[..., 2], kernel[..., 2], mode='nearest')
return filtered_image2 # N*11 , 11*3 -> N * 3
# 实现分通道卷积后再融合, 类似depth-wise卷积
def model2(para, im):
ks = 5
k_int = 3
k_out = 3
t1 = ks*ks*k_int*k_out
kernel = para[:t1]
kernel = kernel.reshape(ks, ks, k_int, k_out)
kernel1 = kernel[..., 0]
out1 = model(kernel1, im)
kernel2 = kernel[..., 1]
out2 = model(kernel2, im)
kernel3 = kernel[..., 2]
out3 = model(kernel3, im)
rat = para[t1:]
ret = np.zeros_like(im)
ret[..., 0] = rat[0] * out1[..., 0] + rat[1] * out1[..., 1] + rat[2] * out1[..., 2]
ret[..., 1] = rat[3] * out2[..., 0] + rat[4] * out2[..., 1] + rat[5] * out2[..., 2]
ret[..., 2] = rat[6] * out3[..., 0] + rat[7] * out3[..., 1] + rat[8] * out3[..., 2]
return ret # N*11 , 11*3 -> N * 3
# 定义函数, 不需要自己写损失函数,在调用函数的时候可以指定损失函数类型
def min_fun_model_sr_split_conv(x, rgb, target):
t = model(x, rgb)
t -= target
# t = np.linalg.norm(t, ord=2, axis=1)
return t.reshape(-1) # 需要是1维数组
def min_fun_model_sr_split_conv_merge(x, rgb, target):
t = model2(x, rgb) - target
# t = np.linalg.norm(t, ord=2, axis=1)
return t.reshape(-1) # 需要是1维数组
def min_fun_model_sr(x, im1, im2):
x = x.reshape([5, 5])
t = cv2.filter2D(im1, -1, x) - im2
return t.reshape(-1)
if __name__ == "__main__":
src = r'D:\superresolution\sharpen\cubic\20221025101435_bicubic.png'
target = r'D:\superresolution\sharpen\cubic\20221025101435_bicubic_shaprpen_edge.png'
im1 = cv2.imread(src)
h, w, c = im1.shape
print(h,w,c)
im2 = cv2.imread(target)
# generating the kernels
kernel_sharpen = np.array([[-1, -1, -1, -1, -1],
[-1, 2, 2, 2, -1],
[-1, 2, 8, 2, -1],
[-2, 2, 2, 2, -1],
[-1, -1, -1, -1, -1]])
kernel_sharpen = kernel_sharpen / np.sum(kernel_sharpen)
# process and output the image
im2 = cv2.filter2D(im1, -1, kernel_sharpen)
im3 = cv2.resize(im1, (h//2, w//2))
im4 = cv2.resize(im2, (h//2, w//2))
print(im1.shape, im2.shape)
# 先中值滤波一下,避免噪声像素的影响, 滤波后生成的3Dlut 产生的图像可能会有一丢丢的模糊效果。
# rgb = cv2.medianBlur(im3, 3).reshape(-1, 3) / 255
# srgb = cv2.medianBlur(im4, 3).reshape(-1, 3) / 255
rgb = im3/ 255
srgb = im4/ 255
print('lq method ret:\n')
len = 5
# filter = np.random.uniform(0, 1, [len, len]).reshape(-1)
# print('init filter:', filter)
# res = least_squares(min_fun_model_sr, filter, bounds=(-1, 2), args=(rgb, srgb), verbose=1)
filter = np.random.uniform(0, 1, [len *len* 3* 3 + 9]).reshape(-1)
print('init filter:', filter)
res = least_squares(min_fun_model_sr_split_conv_merge, filter, bounds=(-1, 2), args=(rgb, srgb), verbose=1)
para = res.x
# apply
# file = r'd.jpeg'
# im0 = cv2.imread(file)
im_t = im1 / 255
# method 1
#im_t1 = cv2.filter2D(im_t, -1, kernel)
# mothod 2
# im_t1 = model( kernel, im_t)
# method 3
im_t1 = model2(para, im_t)
a3 = np.clip(im_t1 * 255, 0, 255).astype(np.uint8)
cv2.imwrite(src[:-4] + '_filter_gen_split_merge.png', a3)
np.set_printoptions(suppress=True)
print(np.round(para, 3), np.sum(para[:75*3]))
print(kernel_sharpen, np.sum(kernel_sharpen))
3. 分析
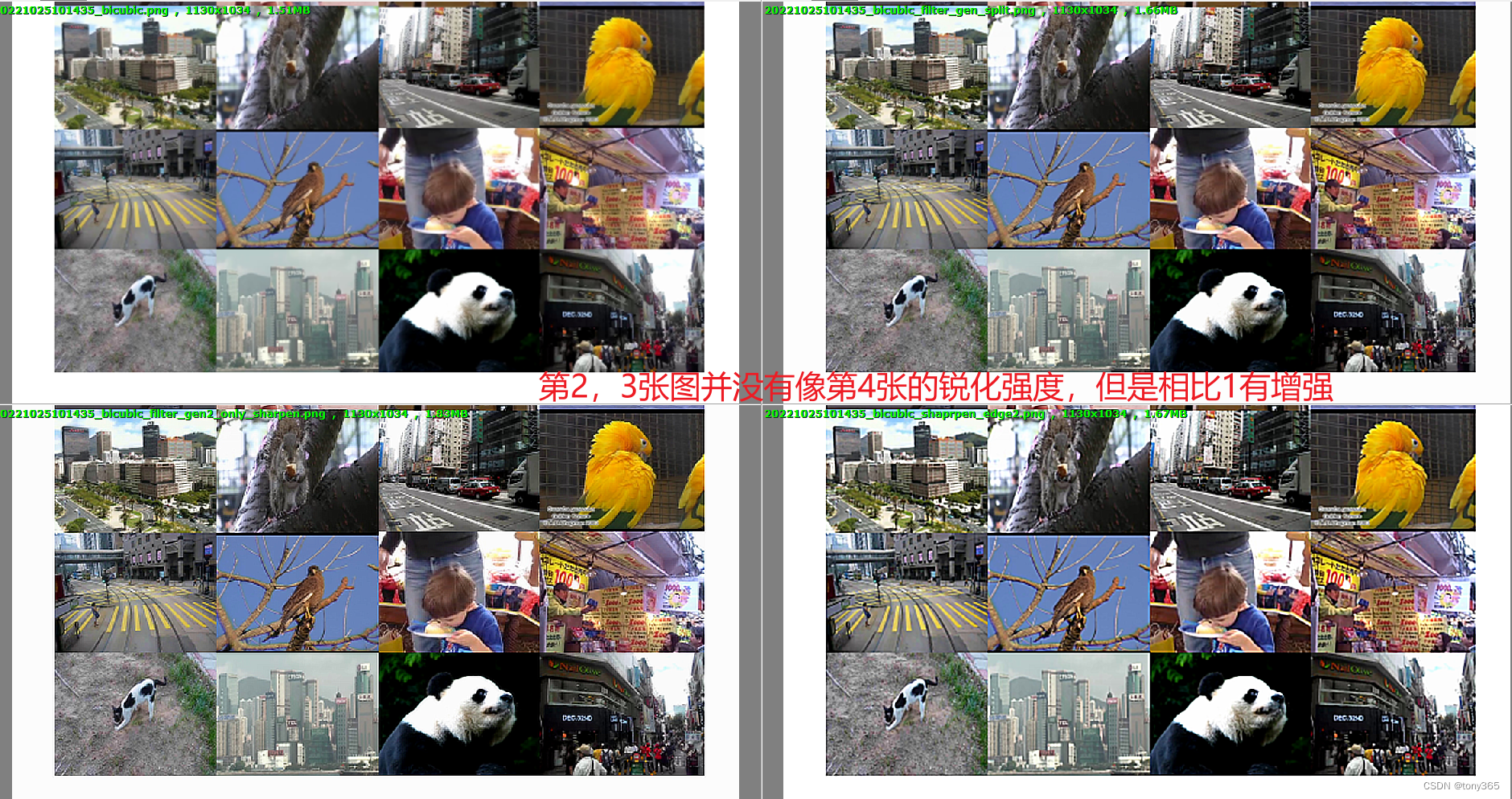
通过以上3个model都可以优化得到相关参数,3个model的结果差距不大,和groundtruth 效果比较锐化效果减弱。
因此训练的时候,1. 对target 进行增强 2. 可以利用更多图像来 学习 filter.