如果没有方向
往哪里走都是前方
做自己的光 不需要多亮
曾受过的伤 会长出翅膀
大雨冲刷过的天空会更加明亮
流过泪的眼睛也一样
做自己的光 悄悄的发亮
逆风的方向 更容易飞翔
世界怎样在于你凝视它的目光
那未曾谋面过的远方
或许就在身旁
🎵 虎妹Huu、承桓《做自己的光》
在图像处理中,识别和检测水印是一项重要任务,特别是在版权保护和验证领域。本文将介绍如何使用OpenCV和Python库来识别图像中的固定水印,即使水印的位置和角度可能不同。我们将使用特征匹配技术来实现这一目标。
安装所需的库
在开始之前,请确保你已经安装了必要的Python库:
pip install opencv-python numpy
代码实现
以下是完整的Python代码,展示了如何从文件夹中读取图像,增强图像颜色以凸显蓝色并降低黑白灰色的影响,然后使用特征匹配技术检测图像中的水印。
import cv2
import numpy as np
import os
def extract_images_from_folder(folder_path):
"""
从文件夹中读取所有PNG图像并进行预处理
"""
images = []
filenames = []
for filename in os.listdir(folder_path):
if filename.lower().endswith(".png"):
image_path = os.path.join(folder_path, filename)
image = cv2.imread(image_path)
# 调整图像大小为800x600
image = cv2.resize(image, (800, 600))
enhanced_image = enhance_colors(image)
images.append(enhanced_image)
filenames.append(filename)
return images, filenames
def detect_watermark(image, watermark_template):
"""
使用特征匹配检测图像中是否存在水印
"""
# 转换为灰度图像
gray_image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
gray_template = cv2.cvtColor(watermark_template, cv2.COLOR_BGR2GRAY)
# 使用ORB特征检测器
orb = cv2.ORB_create()
# 检测关键点和描述符
keypoints1, descriptors1 = orb.detectAndCompute(gray_image, None)
keypoints2, descriptors2 = orb.detectAndCompute(gray_template, None)
# 创建BFMatcher对象
bf = cv2.BFMatcher(cv2.NORM_HAMMING, crossCheck=True)
# 匹配描述符
matches = bf.match(descriptors1, descriptors2)
# 根据匹配距离排序
matches = sorted(matches, key=lambda x: x.distance)
# 设定一个距离阈值,过滤较好的匹配
threshold = 70 # 可能需要调整此阈值
good_matches = [m for m in matches if m.distance < threshold]
# 检查匹配的数量是否足够
if len(good_matches) > 80: # 你可以调整这个阈值
return True, good_matches
else:
return False, None
def enhance_colors(image):
"""
增强图像中的其他颜色,降低黑、白、灰的影响
"""
# 将图像从BGR转换到HSV
hsv_image = cv2.cvtColor(image, cv2.COLOR_BGR2HSV)
# 创建一个掩码,选择非黑白灰色区域
# 定义黑色、白色和灰色的范围
lower_black = np.array([0, 0, 0])
upper_black = np.array([180, 255, 30])
lower_white = np.array([0, 0, 200])
upper_white = np.array([180, 30, 255])
lower_gray = np.array([0, 0, 31])
upper_gray = np.array([180, 30, 199])
# 创建掩码
mask_black = cv2.inRange(hsv_image, lower_black, upper_black)
mask_white = cv2.inRange(hsv_image, lower_white, upper_white)
mask_gray = cv2.inRange(hsv_image, lower_gray, upper_gray)
# 合并掩码
mask = mask_black | mask_white | mask_gray
# 反转掩码
mask = cv2.bitwise_not(mask)
# 增强非黑白灰区域的饱和度和亮度
hsv_image[:, :, 1] = np.where(mask > 0, hsv_image[:, :, 1] * 2, hsv_image[:, :, 1]) # 增强饱和度
hsv_image[:, :, 2] = np.where(mask > 0, hsv_image[:, :, 2] * 1.5, hsv_image[:, :, 2]) # 增强亮度
# 将图像从HSV转换回BGR
enhanced_image = cv2.cvtColor(hsv_image, cv2.COLOR_HSV2BGR)
return enhanced_image
def main(folder_path, watermark_image_path):
"""
主函数,执行从文件夹读取图像并检测水印的流程
"""
images, filenames = extract_images_from_folder(folder_path)
watermark_template = cv2.imread(watermark_image_path)
for i, image in enumerate(images):
has_watermark, good_matches = detect_watermark(image, watermark_template)
if has_watermark:
print(f"Watermark detected in image {filenames[i]} with {len(good_matches)} good matches")
else:
print(f"No watermark detected in image {filenames[i]}")
if __name__ == "__main__":
folder_path = "img" # 替换为包含PNG文件的文件夹路径
watermark_image_path = "test.jpg" # 替换为你的水印图像路径
main(folder_path, watermark_image_path)
样本案例
水印案例
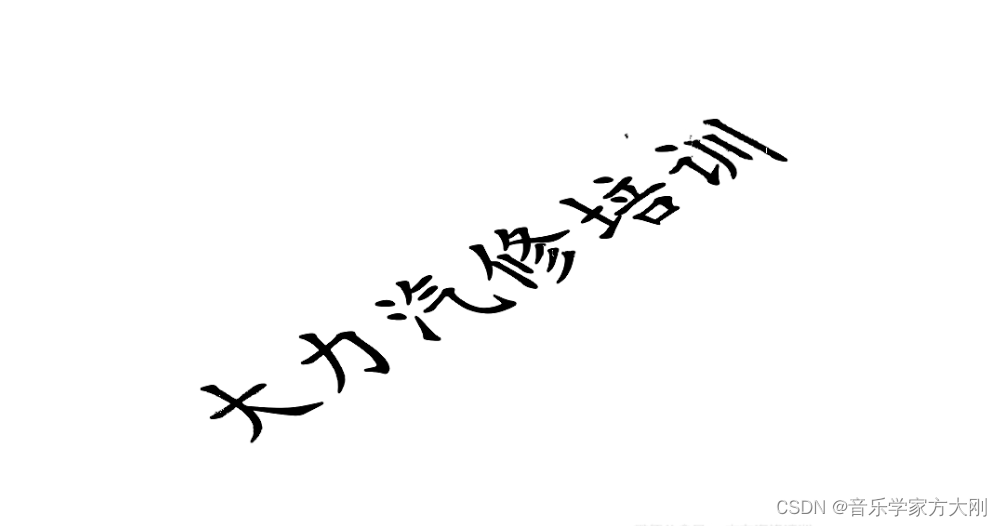
测试案例
HSV转换之后
匹配结果
Watermark detected in image img_1.png with 106 good matches
Watermark detected in image img_2.png with 107 good matches
Watermark detected in image img_3.png with 147 good matches
No watermark detected in image img_4.png
代码解析
-
extract_images_from_folder函数:该函数从指定文件夹中读取所有PNG图像,并将它们调整为800x600的大小。
调用enhance_colors函数增强图像中的其他颜色,降低黑、白、灰的影响。
返回增强后的图像列表和文件名列表。 -
detect_watermark函数:使用ORB特征检测器检测图像和水印模板中的关键点和描述符。
使用BFMatcher对象匹配描述符。
根据匹配距离排序,并过滤较好的匹配。
如果好的匹配数量超过一个阈值,则认为检测到了水印。 -
enhance_colors函数:将图像从BGR转换到HSV颜色空间。
定义黑、白、灰色的HSV范围,并创建掩码。
反转掩码以选择非黑白灰色区域。
增强非黑白灰色区域的饱和度和亮度。
将图像从HSV转换回BGR。 -
main函数:从指定文件夹中读取所有图像,并调用enhance_colors函数进行处理。
读取水印图像。
遍历每一张图像,使用特征匹配来检测水印。
输出每张图像是否检测到水印及其匹配的质量。
结论
通过这种方法,可以识别具有不同位置和角度的固定类型水印。使用特征匹配技术,即使水印的位置和角度有所变化,也能进行有效的识别和检测。希望这篇文章对你有所帮助。如果有任何问题或需要进一步的修改,请在评论区告诉我。