【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing @163.com】
前面学习103和407的时候,当时学过串口的收发。不过当时使用的主要是阻塞的方式。这一次,我们看下应该怎么利用中断的形式进行数据的收发。不仅如此,我们还可以看下,怎么把收到的数据放在一起,当成一个完整的命令去处理。
1、基本串口信息定义
这边的串口主要还是利用a9、a10来实现数据的收发,其中a9负责数据的发送,a10负责数据的接收。除此之外,数据是采用中断的形式进行处理的。
#define DEBUG_USART USART1
#define DEBUG_USART_CLK_ENABLE() __USART1_CLK_ENABLE();
#define DEBUG_USART_RX_GPIO_PORT GPIOA
#define DEBUG_USART_RX_GPIO_CLK_ENABLE() __HAL_RCC_GPIOA_CLK_ENABLE()
#define DEBUG_USART_RX_PIN GPIO_PIN_10
#define DEBUG_USART_RX_AF GPIO_AF7_USART1
#define DEBUG_USART_TX_GPIO_PORT GPIOA
#define DEBUG_USART_TX_GPIO_CLK_ENABLE() __HAL_RCC_GPIOA_CLK_ENABLE()
#define DEBUG_USART_TX_PIN GPIO_PIN_9
#define DEBUG_USART_TX_AF GPIO_AF7_USART1
#define DEBUG_USART_IRQHandler USART1_IRQHandler
#define DEBUG_USART_IRQ USART1_IRQn2、串口的初始化
串口的初始化这边基本上就是八股文,基本上按照套路下就可以了。一般就是配置时钟、配置gpio、配置uart、配置中断。对于我们来说,最重要的baudrate,也就是波特率,就是在这里配置的。
void DEBUG_USART_Config(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
RCC_PeriphCLKInitTypeDef RCC_PeriphClkInit;
DEBUG_USART_RX_GPIO_CLK_ENABLE();
DEBUG_USART_TX_GPIO_CLK_ENABLE();
RCC_PeriphClkInit.PeriphClockSelection = RCC_PERIPHCLK_USART1;
RCC_PeriphClkInit.Usart16ClockSelection = RCC_USART16CLKSOURCE_D2PCLK2;
HAL_RCCEx_PeriphCLKConfig(&RCC_PeriphClkInit);
DEBUG_USART_CLK_ENABLE();
GPIO_InitStruct.Pin = DEBUG_USART_TX_PIN;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
GPIO_InitStruct.Alternate = DEBUG_USART_TX_AF;
HAL_GPIO_Init(DEBUG_USART_TX_GPIO_PORT, &GPIO_InitStruct);
GPIO_InitStruct.Pin = DEBUG_USART_RX_PIN;
GPIO_InitStruct.Alternate = DEBUG_USART_RX_AF;
HAL_GPIO_Init(DEBUG_USART_RX_GPIO_PORT, &GPIO_InitStruct);
UartHandle.Instance = DEBUG_USART;
UartHandle.Init.BaudRate = 115200;
UartHandle.Init.WordLength = UART_WORDLENGTH_8B;
UartHandle.Init.StopBits = UART_STOPBITS_1;
UartHandle.Init.Parity = UART_PARITY_NONE;
UartHandle.Init.Mode = UART_MODE_TX_RX;
UartHandle.Init.HwFlowCtl = UART_HWCONTROL_NONE;
UartHandle.Init.OverSampling = UART_OVERSAMPLING_16;
UartHandle.Init.OneBitSampling = UART_ONEBIT_SAMPLING_DISABLED;
UartHandle.AdvancedInit.AdvFeatureInit = UART_ADVFEATURE_NO_INIT;
HAL_UART_Init(&UartHandle);
HAL_NVIC_SetPriority(DEBUG_USART_IRQ, 0, 0);
HAL_NVIC_EnableIRQ(DEBUG_USART_IRQ);
__HAL_UART_ENABLE_IT(&UartHandle,UART_IT_RXNE);
}3、函数重定向
对于喜欢用getchar、printf进行数据收发的同学,一般还需要实现一下fputc、fgetc这两个函数。实现了这两个函数,后续就可以使用getchar和printf了。
void Usart_SendString(uint8_t *str)
{
unsigned int k=0;
do
{
HAL_UART_Transmit( &UartHandle,(uint8_t *)(str + k) ,1,1000);
k++;
} while(*(str + k)!='\0');
}
int fputc(int ch, FILE *f)
{
HAL_UART_Transmit(&UartHandle, (uint8_t *)&ch, 1, 1000);
return (ch);
}
int fgetc(FILE *f)
{
int ch;
HAL_UART_Receive(&UartHandle, (uint8_t *)&ch, 1, 1000);
return (ch);
}4、中断处理
配置好了uart属性部分,下面就是中断处理。这里中断是一个数据、一个数据进行接收的,实际处理的时候,一般是进入中断之后循环接收数据,直到没有新的数据收到为止。
extern uint8_t Rxflag;
extern uint8_t ucTemp;
void DEBUG_USART_IRQHandler(void)
{
if(__HAL_UART_GET_IT( &UartHandle, UART_IT_RXNE ) != RESET)
{
Rxflag=1;
HAL_UART_Receive(&UartHandle, (uint8_t *)&ucTemp, 1, 1000);
}
HAL_UART_IRQHandler(&UartHandle);
}代码中Rxflag是标志位,ucTemp代表实际接收到的数据。
5、接收数据实际处理
单个接收到的数据一般是没有办法直接处理的,通常都是收集到一块来处理。处理结束的标志一般就是回车换行符,或者是某个特殊的标志也可以的。
while (1)
{
if(Rxflag)
{
if (usRxCount < sizeof(ucaRxBuf))
{
ucaRxBuf[usRxCount++] = ucTemp;
}
else
{
usRxCount = 0;
}
if (ucTemp == 0x0A)
{
HAL_UART_Transmit( &UartHandle, (uint8_t *)ucaRxBuf,usRxCount,1000 );
usRxCount = 0;
}
Rxflag=0;
__HAL_UART_ENABLE_IT(&UartHandle,UART_IT_RXNE);
}
}这边做的比较简单,整个while(1)部分是放在main函数里面的。如果Rxflag为1,那么把接收到的数据放到ucaRxBuf里面。接着检查数据是不是0x0a,也就是换行,如果是,就把数据发送回去。最后把Rxflag重新置0,打开串口接收中断,准备新的数据进来。
大家如果做的复杂一点,数据上面可以用queue的形式来处理,函数也可以抽象出来,实现部分做成parse command的形式,这样处理起来就会简单的多。另外,数据接收部分要尽快打开中断。
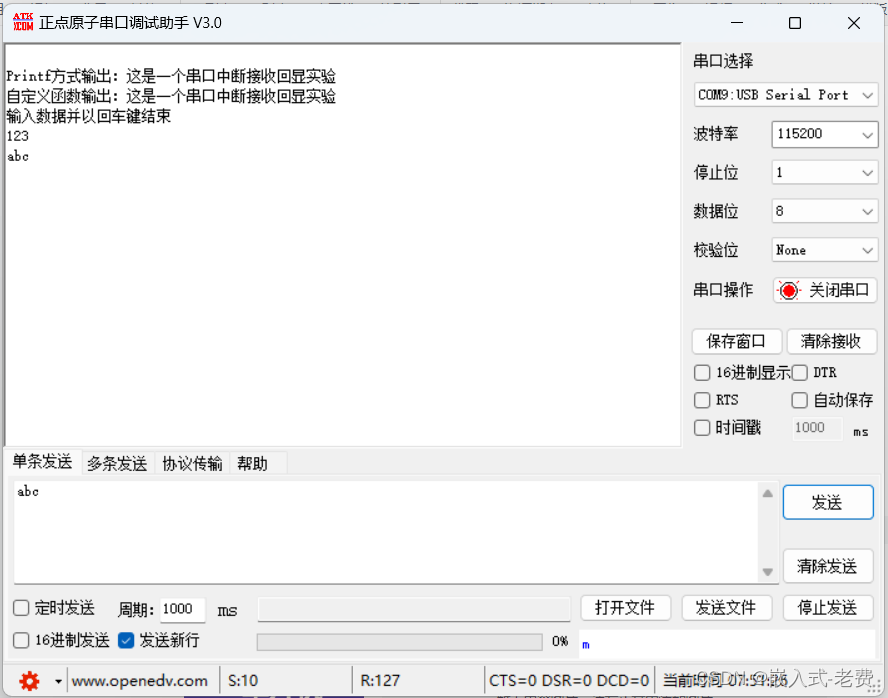
6、测试和验证
测试就比较简单了,直接把代码编译、下载后,利用ATK-XCOM上位机打开串口,输入123、abc这样的内容,看看有没有回显就知道代码对不对了。