转载请注明出处:小锋学长生活大爆炸[xfxuezhagn.cn]
如果本文帮助到了你,欢迎[点赞、收藏、关注]哦~
PyTorch中的DDP会将模型复制到每个GPU中。
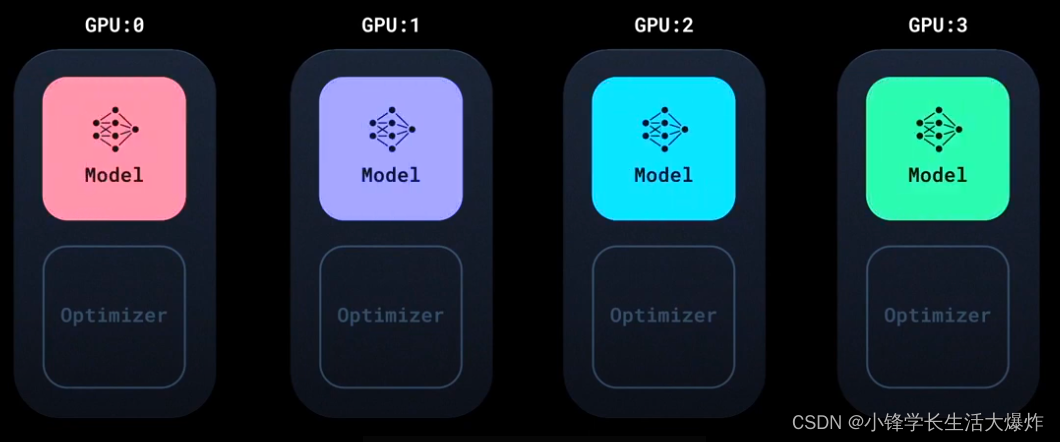
梯度同步默认使用Ring-AllReduce进行,重叠了通信和计算。

示例代码:
视频:https://youtu.be/Cvdhwx-OBBo
代码:multigpu.py
import torch
import torch.nn.functional as F
from torch.utils.data import DataLoader
import torch.multiprocessing as mp
from torch.nn.parallel import DistributedDataParallel as DDP
from torch.distributed import init_process_group, destroy_process_group
import os
import dgl
from dgl.data import RedditDataset
from dgl.nn.pytorch import GraphConv
def ddp_setup(rank, world_size):
"""
DDP初始化设置。
参数:
rank (int): 当前进程的唯一标识符。
world_size (int): 总进程数。
"""
os.environ["MASTER_ADDR"] = "localhost" # 设置主节点地址
os.environ["MASTER_PORT"] = "12355" # 设置主节点端口
init_process_group(backend="nccl", rank=rank, world_size=world_size) # 初始化进程组
torch.cuda.set_device(rank) # 设置当前进程使用的GPU设备
class GCN(torch.nn.Module):
def __init__(self, in_feats, h_feats, num_classes):
"""
初始化图卷积网络(GCN)。
参数:
in_feats (int): 输入特征的维度。
h_feats (int): 隐藏层特征的维度。
num_classes (int): 输出类别的数量。
"""
super(GCN, self).__init__()
self.conv1 = GraphConv(in_feats, h_feats) # 第一层图卷积
self.conv2 = GraphConv(h_feats, num_classes) # 第二层图卷积
def forward(self, g, in_feat):
"""
前向传播。
参数:
g (DGLGraph): 输入的图。
in_feat (Tensor): 输入特征。
返回:
Tensor: 输出的logits。
"""
h = self.conv1(g, in_feat) # 进行第一层图卷积
h = F.relu(h) # ReLU激活
h = self.conv2(g, h) # 进行第二层图卷积
return h
class Trainer:
def __init__(
self,
model: torch.nn.Module,
train_data: DataLoader,
optimizer: torch.optim.Optimizer,
gpu_id: int,
save_every: int,
) -> None:
"""
初始化训练器。
参数:
model (torch.nn.Module): 要训练的模型。
train_data (DataLoader): 训练数据的DataLoader。
optimizer (torch.optim.Optimizer): 优化器。
gpu_id (int): GPU ID。
save_every (int): 每隔多少个epoch保存一次检查点。
"""
self.gpu_id = gpu_id
self.model = model.to(gpu_id) # 将模型移动到指定GPU
self.train_data = train_data
self.optimizer = optimizer
self.save_every = save_every
self.model = DDP(model, device_ids=[gpu_id]) # 使用DDP包装模型
def _run_batch(self, batch):
"""
运行单个批次。
参数:
batch: 单个批次的数据。
"""
self.optimizer.zero_grad() # 梯度清零
graph, features, labels = batch
graph = graph.to(self.gpu_id) # 将图移动到GPU
features = features.to(self.gpu_id) # 将特征移动到GPU
labels = labels.to(self.gpu_id) # 将标签移动到GPU
output = self.model(graph, features) # 前向传播
loss = F.cross_entropy(output, labels) # 计算交叉熵损失
loss.backward() # 反向传播
self.optimizer.step() # 更新模型参数
def _run_epoch(self, epoch):
"""
运行单个epoch。
参数:
epoch (int): 当前epoch号。
"""
print(f"[GPU{self.gpu_id}] Epoch {epoch} | Steps: {len(self.train_data)}")
for batch in self.train_data:
self._run_batch(batch) # 运行每个批次
def _save_checkpoint(self, epoch):
"""
保存训练检查点。
参数:
epoch (int): 当前epoch号。
"""
ckp = self.model.module.state_dict() # 获取模型的状态字典
PATH = "checkpoint.pt" # 定义检查点路径
torch.save(ckp, PATH) # 保存检查点
print(f"Epoch {epoch} | Training checkpoint saved at {PATH}")
def train(self, max_epochs: int):
"""
训练模型。
参数:
max_epochs (int): 总训练epoch数。
"""
for epoch in range(max_epochs):
self._run_epoch(epoch) # 运行当前epoch
if self.gpu_id == 0 and epoch % self.save_every == 0:
self._save_checkpoint(epoch) # 保存检查点
def load_train_objs():
"""
加载训练所需的对象:数据集、模型和优化器。
返回:
tuple: 数据集、模型和优化器。
"""
data = RedditDataset(self_loop=True) # 加载Reddit数据集,并添加自环
graph = data[0] # 获取图
train_mask = graph.ndata['train_mask'] # 获取训练掩码
features = graph.ndata['feat'] # 获取特征
labels = graph.ndata['label'] # 获取标签
model = GCN(features.shape[1], 128, data.num_classes) # 初始化GCN模型
optimizer = torch.optim.Adam(model.parameters(), lr=1e-2) # 初始化优化器
train_data = [(graph, features, labels)] # 准备训练数据
return train_data, model, optimizer
def prepare_dataloader(dataset, batch_size: int):
"""
准备DataLoader。
参数:
dataset: 数据集。
batch_size (int): 批次大小。
返回:
DataLoader: DataLoader对象。
"""
return DataLoader(
dataset,
batch_size=batch_size,
pin_memory=True,
shuffle=True,
collate_fn=lambda x: x[0] # 自定义collate函数,解包数据集中的单个元素
)
def main(rank: int, world_size: int, save_every: int, total_epochs: int, batch_size: int):
"""
主训练函数。
参数:
rank (int): 当前进程的唯一标识符。
world_size (int): 总进程数。
save_every (int): 每隔多少个epoch保存一次检查点。
total_epochs (int): 总训练epoch数。
batch_size (int): 批次大小。
"""
ddp_setup(rank, world_size) # DDP初始化设置
dataset, model, optimizer = load_train_objs() # 加载训练对象
train_data = prepare_dataloader(dataset, batch_size) # 准备DataLoader
trainer = Trainer(model, train_data, optimizer, rank, save_every) # 初始化训练器
trainer.train(total_epochs) # 开始训练
destroy_process_group() # 销毁进程组
if __name__ == "__main__":
import argparse
parser = argparse.ArgumentParser(description='Simple distributed training job')
parser.add_argument('--total_epochs', default=50, type=int, help='Total epochs to train the model')
parser.add_argument('--save_every', default=10, type=int, help='How often to save a snapshot')
parser.add_argument('--batch_size', default=8, type=int, help='Input batch size on each device (default: 32)')
args = parser.parse_args()
world_size = torch.cuda.device_count() # 获取可用GPU的数量
mp.spawn(main, args=(world_size, args.save_every, args.total_epochs, args.batch_size), nprocs=world_size) # 启动多个进程进行分布式训练

![[Redis] Redis Desktop Manager 安装包和连接和创建流程](https://img-blog.csdnimg.cn/direct/a8f47cc643bd4ac8aa367ea122ea4559.png)