一 目标检测数据集
目标检测领域没有像MNIST和Fashion‐MNIST那样的小数据集。为了快速测试目标检测模型,我们收集并标记了一个小型数据集。首先,我们拍摄了一组香蕉的照片,并生成了1000张不同角度和大小的香蕉图像。然 后,我们在一些背景图片的随机位置上放一张香蕉的图像。最后,我们在图片上为这些香蕉标记了边界框。
%matplotlib inline
import os
import pandas as pd
import torch
import torchvision
from d2l import torch as d2l
#@save
d2l.DATA_HUB['banana-detection'] = (
d2l.DATA_URL + 'banana-detection.zip',
'5de26c8fce5ccdea9f91267273464dc968d20d72')通过read_data_bananas函数,我们 读取香蕉检测数据集。该数据集包括一个的CSV文件,内含目标类别标签 和位于左上角和右下角的真实边界框坐标。
#@save
def read_data_bananas(is_train=True):
"""读取香蕉检测数据集中的图像和标签"""
data_dir = d2l.download_extract('banana-detection')
csv_fname = os.path.join(data_dir, 'bananas_train' if is_train
else 'bananas_val', 'label.csv')
csv_data = pd.read_csv(csv_fname)
csv_data = csv_data.set_index('img_name')
images, targets = [], []
for img_name, target in csv_data.iterrows():
images.append(torchvision.io.read_image(
os.path.join(data_dir, 'bananas_train' if is_train else
'bananas_val', 'images', f'{img_name}')))
# 这里的target包含(类别,左上角x,左上角y,右下角x,右下角y),
# 其中所有图像都具有相同的香蕉类(索引为0)
targets.append(list(target))
return images, torch.tensor(targets).unsqueeze(1) / 256通过使用read_data_bananas函数 读取图像和标签,以下BananasDataset类别将允许我们创建一个自定 义Dataset实例来加载香蕉检测数据集。
#@save
class BananasDataset(torch.utils.data.Dataset):
"""一个用于加载香蕉检测数据集的自定义数据集"""
def __init__(self, is_train):
self.features, self.labels = read_data_bananas(is_train)
print('read ' + str(len(self.features)) + (f' training examples' if
is_train else f' validation examples'))
def __getitem__(self, idx):
return (self.features[idx].float(), self.labels[idx])
def __len__(self):
return len(self.features)最后,我们定义load_data_bananas函数,来为训练集和测试集返回两个数据加载器实例。对于测试集,无须按随机顺序读取它。
#@save
def load_data_bananas(batch_size):
"""加载香蕉检测数据集"""
train_iter = torch.utils.data.DataLoader(BananasDataset(is_train=True),
batch_size, shuffle=True)
val_iter = torch.utils.data.DataLoader(BananasDataset(is_train=False),
batch_size)
return train_iter, val_iter让我们读取一个小批量,并打印其中的图像和标签的形状。图像的小批量的形状为(批量大小、通道数、高 度、宽度),看起来很眼熟:它与我们之前图像分类任务中的相同。标签的小批量的形状为(批量大小,m, 5),其中m是数据集的任何图像中边界框可能出现的最大数量。
batch_size, edge_size = 32, 256
train_iter, _ = load_data_bananas(batch_size)
batch = next(iter(train_iter))
batch[0].shape, batch[1].shape让我们展示10幅带有真实边界框的图像。我们可以看到在所有这些图像中香蕉的旋转角度、大小和位置都有 所不同。当然,这只是一个简单的人工数据集,实践中真实世界的数据集通常要复杂得多。
imgs = (batch[0][0:10].permute(0, 2, 3, 1)) / 255
axes = d2l.show_images(imgs, 2, 5, scale=2)
for ax, label in zip(axes, batch[1][0:10]):
d2l.show_bboxes(ax, [label[0][1:5] * edge_size], colors=['w'])
小结:
- 我们 收集的香蕉检测数据集可用于演示目标检测模型。
- 用于目标检测的数据加载与图像分类的数据加载类似。但是,在目标检测中,标签还包含真实边界框的信息,它不出现在图像分类中。
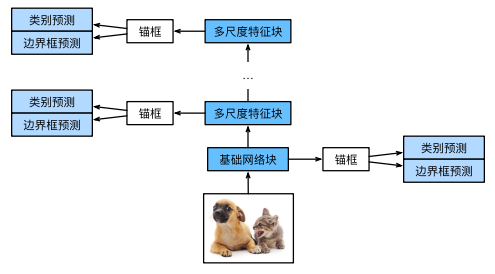
二 单发多框检测(SSD)
通过深度神经网络分层表示图像的多尺度目标检测的设计。由于接近多尺度特征图较小,但具有较大的感受野,它们适合检测较少但较大的物体。简而言之,通过多尺度特征块, 单发多框检测生成不同大小的锚框,并通过预测边界框的类别和偏移量来检测大小不同的目标,因此这是一 个多尺度目标检测模型。
2.1 类别预测层
我们定义了这样一个类别预测层,通过参数num_anchors和num_classes分别指定了a和q。该图层使 用填充为1的3 × 3的卷积层。此卷积层的输入和输出的宽度和高度保持不变。
%matplotlib inline
import torch
import torchvision
from torch import nn
from torch.nn import functional as F
from d2l import torch as d2l
def cls_predictor(num_inputs, num_anchors, num_classes):
return nn.Conv2d(num_inputs, num_anchors * (num_classes + 1),
kernel_size=3, padding=1)2.2 边界框预测层
边界框预测层的设计与类别预测层的设计类似。唯一不同的是,这里需要为每个锚框预测4个偏移量,而不 是q + 1个类别。
def bbox_predictor(num_inputs, num_anchors):
return nn.Conv2d(num_inputs, num_anchors * 4, kernel_size=3, padding=1)2.3 连结多尺度的预测
单发多框检测使用多尺度特征图来生成锚框并预测其类别和偏移量。在不同的尺度下, 特征图的形状或以同一单元为中心的锚框的数量可能会有所不同。因此,不同尺度下预测输出的形状可能会 有所不同。
def forward(x, block):
return block(x)
Y1 = forward(torch.zeros((2, 8, 20, 20)), cls_predictor(8, 5, 10))
Y2 = forward(torch.zeros((2, 16, 10, 10)), cls_predictor(16, 3, 10))
Y1.shape, Y2.shape
# (torch.Size([2, 55, 20, 20]), torch.Size([2, 33, 10, 10]))通道维包含中心相同的锚框的预测结果。我们首先将通道维移到最后一维。因为不同尺度下批量大小仍保持 不变,我们可以将预测结果转成二维的(批量大小,高×宽×通道数)的格式,以方便之后在维度1上的连结。
def flatten_pred(pred):
return torch.flatten(pred.permute(0, 2, 3, 1), start_dim=1)
def concat_preds(preds):
return torch.cat([flatten_pred(p) for p in preds], dim=1)这样一来,尽管Y1和Y2在通道数、高度和宽度方面具有不同的大小,我们仍然可以在同一个小批量的两个不 同尺度上连接这两个预测输出。
concat_preds([Y1, Y2]).shape
# torch.Size([2, 25300])为了在多个尺度下检测目标,我们在下面定义了高和宽减半块down_sample_blk,该模块将输入特征图的高 度和宽度减半。事实上,该块应用了在 subsec_vgg-blocks中的VGG模块设计。更具体地说,每个高和宽减 半块由两个填充为1的3 × 3的卷积层、以及步幅为2的2 × 2最大汇聚层组成。我们知道,填充为1的3 × 3卷积 层不改变特征图的形状。但是,其后的2 × 2的最大汇聚层将输入特征图的高度和宽度减少了一半。对于此高 和宽减半块的输入和输出特征图,因为1 × 2 + (3 − 1) + (3 − 1) = 6,所以输出中的每个单元在输入上都有一 个6 × 6的感受野。因此,高和宽减半块会扩大每个单元在其输出特征图中的感受野。
def down_sample_blk(in_channels, out_channels):
blk = []
for _ in range(2):
blk.append(nn.Conv2d(in_channels, out_channels,
kernel_size=3, padding=1))
blk.append(nn.BatchNorm2d(out_channels))
blk.append(nn.ReLU())
in_channels = out_channels
blk.append(nn.MaxPool2d(2))
return nn.Sequential(*blk)在以下示例中,我们构建的高和宽减半块会更改输入通道的数量,并将输入特征图的高度和宽度减半。
forward(torch.zeros((2, 3, 20, 20)), down_sample_blk(3, 10)).shape
# torch.Size([2, 10, 10, 10])2.4 基本网络块
基本网络块用于从输入图像中抽取特征。为了计算简洁,我们构造了一个小的基础网络,该网络串联3个高和 宽减半块,并逐步将通道数翻倍。给定输入图像的形状为256×256,此基本网络块输出的特征图形状为32×32 (256/23 = 32)。
def base_net():
blk = []
num_filters = [3, 16, 32, 64]
for i in range(len(num_filters) - 1):
blk.append(down_sample_blk(num_filters[i], num_filters[i+1]))
return nn.Sequential(*blk)
forward(torch.zeros((2, 3, 256, 256)), base_net()).shape
# torch.Size([2, 64, 32, 32])2.5 完整的模型
完整的单发多框检测模型由五个模块组成。每个块生成的特征图既用于生成锚框,又用于预测这些锚框的类 别和偏移量。在这五个模块中,第一个是基本网络块,第二个到第四个是高和宽减半块,最后一个模块使用 全局最大池将高度和宽度都降到1。
def get_blk(i):
if i == 0:
blk = base_net()
elif i == 1:
blk = down_sample_blk(64, 128)
elif i == 4:
blk = nn.AdaptiveMaxPool2d((1,1))
else:
blk = down_sample_blk(128, 128)
return blk现在我们为每个块定义 前向传播。与图像分类任务不同,此处的输出包括:CNN特征图Y;在当前尺度下根 据Y生成的锚框;预测的这些锚框的类别和偏移量(基于Y)。
def blk_forward(X, blk, size, ratio, cls_predictor, bbox_predictor):
Y = blk(X)
anchors = d2l.multibox_prior(Y, sizes=size, ratios=ratio)
cls_preds = cls_predictor(Y)
bbox_preds = bbox_predictor(Y)
return (Y, anchors, cls_preds, bbox_preds)一个较接近顶部的多尺度特征块是用于检测较大目标的,因此需要生成更大的锚框。 在上面的前向传播中,在每个多尺度特征块上,我们通过调用的multibox_prior函数(见 13.4节)的sizes参 数传递两个比例值的列表。在下面,0.2和1.05之间的区间被均匀分成五个部分,以确定五个模块的在不同尺度 下的较小值:0.2、0.37、0.54、0.71和0.88。之后,他们较大的值由√ 0.2 × 0.37 = 0.272、 √ 0.37 × 0.54 = 0.447等 给出。
sizes = [[0.2, 0.272], [0.37, 0.447], [0.54, 0.619], [0.71, 0.79],
[0.88, 0.961]]
ratios = [[1, 2, 0.5]] * 5
num_anchors = len(sizes[0]) + len(ratios[0]) - 1现在,我们就可以按如下方式定义 完整的模型TinySSD 了。
class TinySSD(nn.Module):
def __init__(self, num_classes, **kwargs):
super(TinySSD, self).__init__(**kwargs)
self.num_classes = num_classes
idx_to_in_channels = [64, 128, 128, 128, 128]
for i in range(5):
# 即赋值语句self.blk_i=get_blk(i)
setattr(self, f'blk_{i}', get_blk(i))
setattr(self, f'cls_{i}', cls_predictor(idx_to_in_channels[i],
num_anchors, num_classes))
setattr(self, f'bbox_{i}', bbox_predictor(idx_to_in_channels[i],
num_anchors))
def forward(self, X):
anchors, cls_preds, bbox_preds = [None] * 5, [None] * 5, [None] * 5
for i in range(5):
# getattr(self,'blk_%d'%i)即访问self.blk_i
X, anchors[i], cls_preds[i], bbox_preds[i] = blk_forward(
X, getattr(self, f'blk_{i}'), sizes[i], ratios[i],
getattr(self, f'cls_{i}'), getattr(self, f'bbox_{i}'))
anchors = torch.cat(anchors, dim=1)
cls_preds = concat_preds(cls_preds)
cls_preds = cls_preds.reshape(
cls_preds.shape[0], -1, self.num_classes + 1)
bbox_preds = concat_preds(bbox_preds)
return anchors, cls_preds, bbox_preds
我们创建一个模型实例,然后使用它对一个256 × 256像素的小批量图像X执行前向传播。
如本节前面部分所示,第一个模块输出特征图的形状为32 × 32。回想一下,第二到第四个模块为高和宽减半 块,第五个模块为全局汇聚层。由于以特征图的每个单元为中心有4个锚框生成,因此在所有五个尺度下,每 个图像总共生成(322 + 162 + 82 + 42 + 1) × 4 = 5444个锚框。
net = TinySSD(num_classes=1)
X = torch.zeros((32, 3, 256, 256))
anchors, cls_preds, bbox_preds = net(X)
print('output anchors:', anchors.shape)
print('output class preds:', cls_preds.shape)
print('output bbox preds:', bbox_preds.shape)
2.6 训练模型
我们将描述如何训练用于目标检测的单发多框检测模型。
读取香蕉检测数据集:
batch_size = 32
train_iter, _ = d2l.load_data_bananas(batch_size)
# read 1000 training examples
# read 100 validation examples香蕉检测数据集中,目标的类别数为1。定义好模型后,我们需要 初始化其参数并定义优化算法。
device, net = d2l.try_gpu(), TinySSD(num_classes=1)
trainer = torch.optim.SGD(net.parameters(), lr=0.2, weight_decay=5e-4)2.6.1 定义损失函数和评价函数
目标检测有两种类型的损失。第一种有关锚框类别的损失:我们可以简单地复用之前图像分类问题里一直使 用的交叉熵损失函数来计算;第二种有关正类锚框偏移量的损失:预测偏移量是一个回归问题。但是,对于 这个回归问题,我们在这里不使用 3.1.3节中描述的平方损失,而是使用L1范数损失,即预测值和真实值之差的绝对值。掩码变量bbox_masks令负类锚框和填充锚框不参与损失的计算。最后,我们将锚框类别和偏移量的损失相加,以获得模型的最终损失函数。
cls_loss = nn.CrossEntropyLoss(reduction='none')
bbox_loss = nn.L1Loss(reduction='none')
def calc_loss(cls_preds, cls_labels, bbox_preds, bbox_labels, bbox_masks):
batch_size, num_classes = cls_preds.shape[0], cls_preds.shape[2]
cls = cls_loss(cls_preds.reshape(-1, num_classes),
cls_labels.reshape(-1)).reshape(batch_size, -1).mean(dim=1)
bbox = bbox_loss(bbox_preds * bbox_masks,
bbox_labels * bbox_masks).mean(dim=1)
return cls + bbox我们可以 沿用准确率评价分类结果。由于偏移量使用了L1范数损失,我们使用平均绝对误差来评价边界框的 预测结果。这些预测结果是从生成的锚框及其预测偏移量中获得的。
def cls_eval(cls_preds, cls_labels):
# 由于类别预测结果放在最后一维,argmax需要指定最后一维。
return float((cls_preds.argmax(dim=-1).type(
cls_labels.dtype) == cls_labels).sum())
def bbox_eval(bbox_preds, bbox_labels, bbox_masks):
return float((torch.abs((bbox_labels - bbox_preds) * bbox_masks)).sum())2.6.2 训练模型
在训练模型时,我们需要 在模型的前向传播过程中生成多尺度锚框(anchors),并预测其类别(cls_preds)和偏移量(bbox_preds)。然后,我们根据标签信息Y为生成的锚框标记类别(cls_labels)和偏移量(bbox_labels)。 最后,我们根据类别和偏移量的预测和标注值计算损失函数。为了代码简洁,这里没有评价测试数据集。
num_epochs, timer = 20, d2l.Timer()
animator = d2l.Animator(xlabel='epoch', xlim=[1, num_epochs],
legend=['class error', 'bbox mae'])
net = net.to(device)
for epoch in range(num_epochs):
# 训练精确度的和,训练精确度的和中的示例数
# 绝对误差的和,绝对误差的和中的示例数
metric = d2l.Accumulator(4)
net.train()
for features, target in train_iter:
timer.start()
trainer.zero_grad()
X, Y = features.to(device), target.to(device)
# 生成多尺度的锚框,为每个锚框预测类别和偏移量
anchors, cls_preds, bbox_preds = net(X)
# 为每个锚框标注类别和偏移量
bbox_labels, bbox_masks, cls_labels = d2l.multibox_target(anchors, Y)
# 根据类别和偏移量的预测和标注值计算损失函数
l = calc_loss(cls_preds, cls_labels, bbox_preds, bbox_labels,
bbox_masks)
l.mean().backward()
trainer.step()
metric.add(cls_eval(cls_preds, cls_labels), cls_labels.numel(),
bbox_eval(bbox_preds, bbox_labels, bbox_masks),
bbox_labels.numel())
cls_err, bbox_mae = 1 - metric[0] / metric[1], metric[2] / metric[3]
animator.add(epoch + 1, (cls_err, bbox_mae))
print(f'class err {cls_err:.2e}, bbox mae {bbox_mae:.2e}')
print(f'{len(train_iter.dataset) / timer.stop():.1f} examples/sec on '
f'{str(device)}')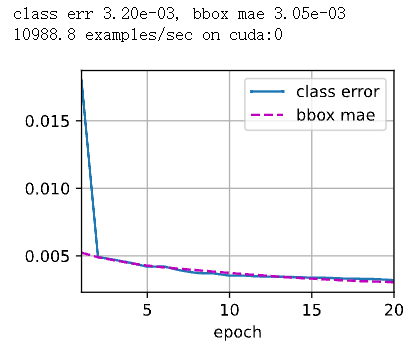
2.6.3 预测目标
在预测阶段,我们希望能把图像里面所有我们感兴趣的目标检测出来。在下面,我们读取并调整测试图像的大小,然后将其转成卷积层需要的四维格式。
X = torchvision.io.read_image('../img/banana.jpg').unsqueeze(0).float()
img = X.squeeze(0).permute(1, 2, 0).long()
使用下面的multibox_detection函数,我们可以根据锚框及其预测偏移量得到预测边界框。然后,通过非极大值抑制来移除相似的预测边界框。
def predict(X):
net.eval()
anchors, cls_preds, bbox_preds = net(X.to(device))
cls_probs = F.softmax(cls_preds, dim=2).permute(0, 2, 1)
output = d2l.multibox_detection(cls_probs, bbox_preds, anchors)
idx = [i for i, row in enumerate(output[0]) if row[0] != -1]
return output[0, idx]
output = predict(X)
output最后,我们筛选所有置信度不低于0.9的边界框,做为最终输出。
def display(img, output, threshold):
d2l.set_figsize((5, 5))
fig = d2l.plt.imshow(img)
for row in output:
score = float(row[1])
if score < threshold:
continue
h, w = img.shape[0:2]
bbox = [row[2:6] * torch.tensor((w, h, w, h), device=row.device)]
d2l.show_bboxes(fig.axes, bbox, '%.2f' % score, 'w')
display(img, output.cpu(), threshold=0.9)
小结:
- 单发多框检测是一种多尺度目标检测模型。基于基础网络块和各个多尺度特征块,单发多框检测生成 不同数量和不同大小的锚框,并通过预测这些锚框的类别和偏移量检测不同大小的目标。
- 在训练单发多框检测模型时,损失函数是根据锚框的类别和偏移量的预测及标注值计算 得出的。