文章目录
- 任务并行的概念
- RTOS如何实现多任务调度?
任务并行的概念
在生活中,经常出现一心多用的情况。比如你需要一边吃饭一边手机回复信息,这里面就存在两个任务:任务一、吃饭。任务二、手机回复信息。
假如你无法一心多用,在一个时间段中只能处理一个任务,这时 就会循环执行吃饭(时间:a1 ~ a6)。
同样在一个时间段中只能处理手机回复信息任务,这时会循环执行手机回复信息任务(时间:b1 ~ b6)。
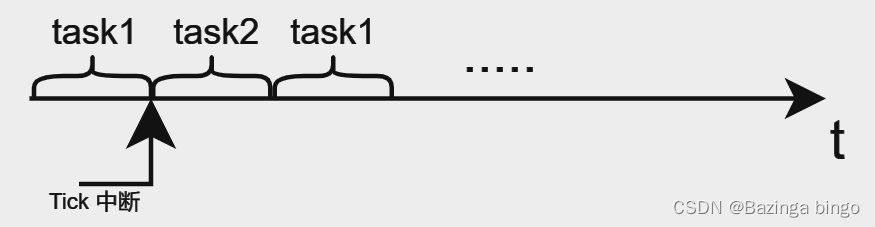
若要使任务并行运行,可以将吃饭和手机回复信息两个任务的时间打碎并且穿插在一起运行(时间:a1、b1、a2、b2、a3、b3、a4、b4、a5、b5、a6、b6)
当你的大脑处理任务的速度足够快,在宏观上看两个任务是同步进行。
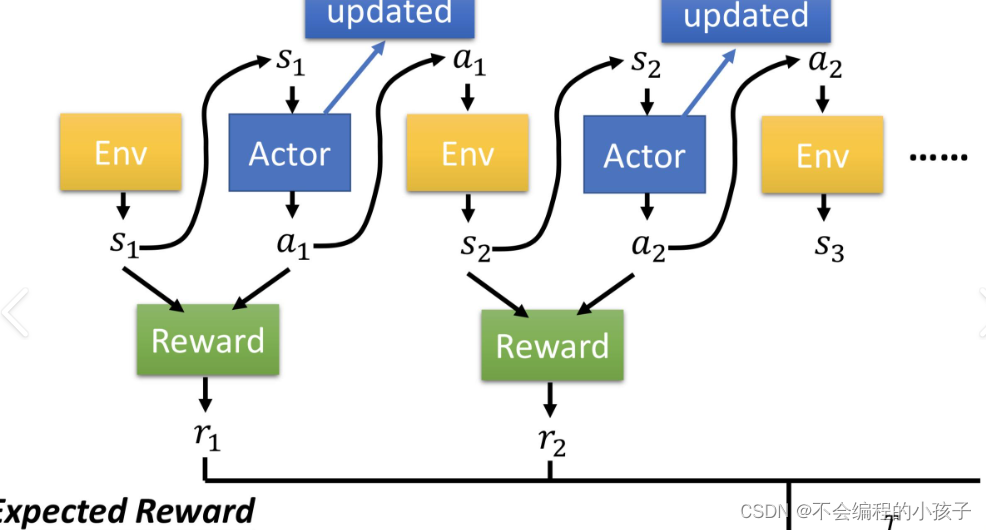
RTOS也是如此,若想要将多任务同时进行的时候,RTOS将时间分成很多个小片段,每个小片段调度不同的任务运行。这样就实现多任务在RTOS上是并列运行的。
RTOS如何实现多任务调度?
在RTOS中存在多个任务(假如 task1~ task10),为了实现多任务同时调度运行,内部维护三类任务链表 (Ready List 就绪链表、Delay List 等待链表、Suspend List 挂起链表)。
Ready List 就绪链表 分为 6个优先级不同的链表。任务可以根据自身的优先级进行站队。
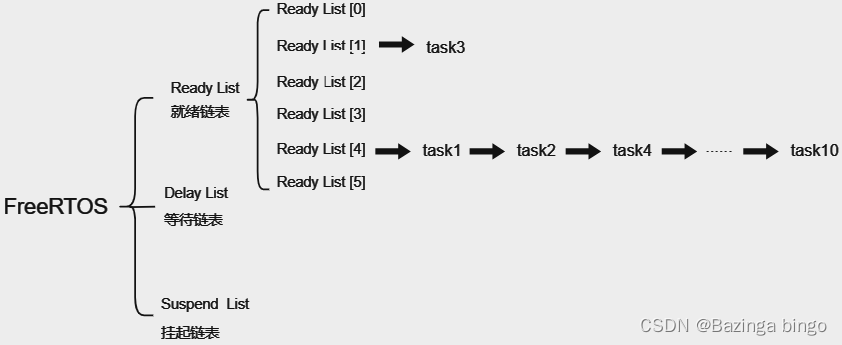
优先级值越小,任务优先级越高。task3优先级高于其他队列。
当系统时间片段到达时会触发Tick中断,中断里执行两个动作:
1、循环遍历每个就绪链表找出最高优先级的任务。
2、执行
如果task3 任务运行过程出现阻塞,会将task3移动到Delay List 等待链表。此时,当Tick中断到来时遍历优先级为4里的任务,取出task1运行完,将task1移动至task10后面。接着取出task2运行完,将task2移动至 此时task1后面。以此类推。
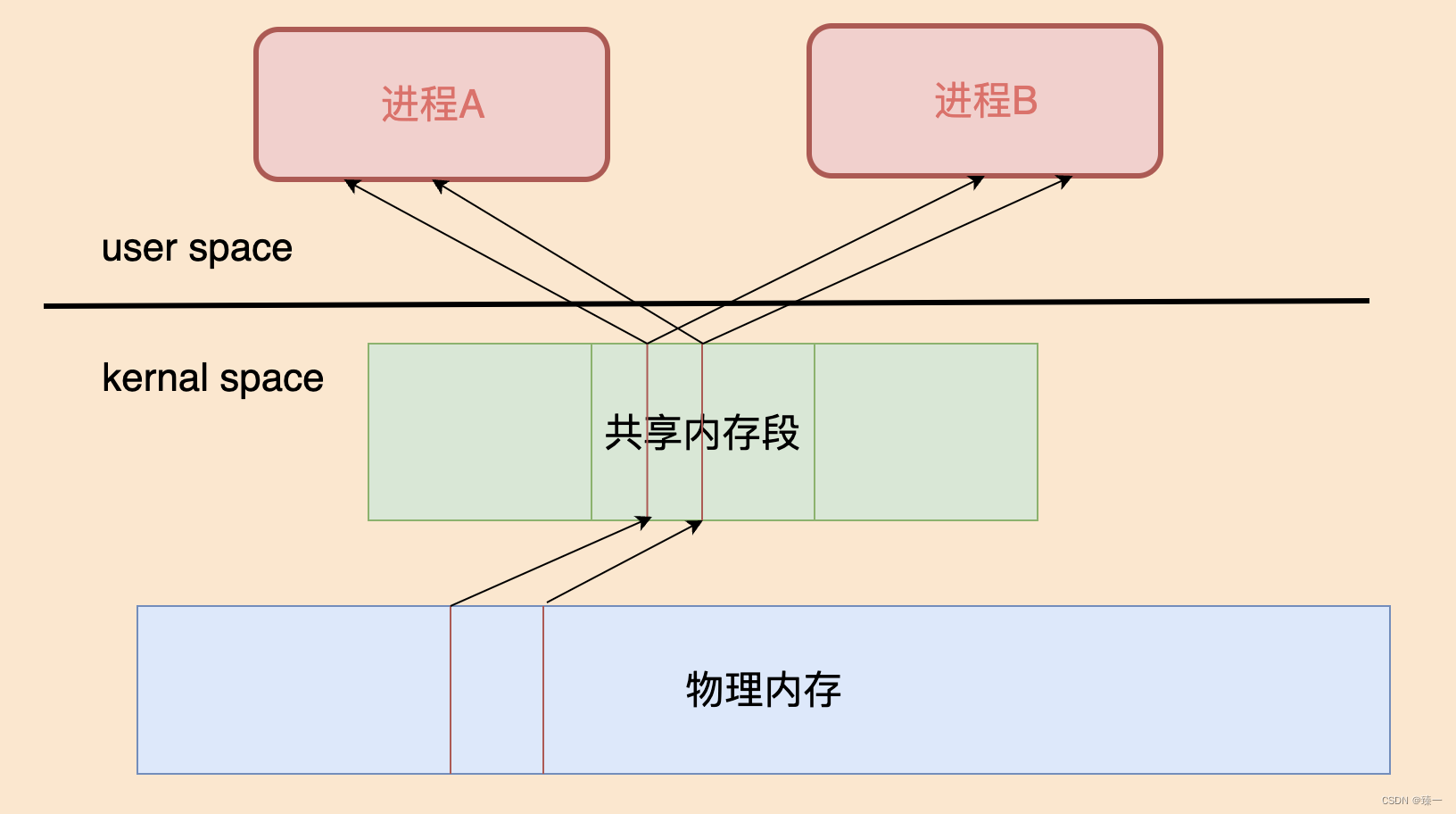




![云服务平台仿真-身份认证/授权/申请和释放IT资源[云计算3]](https://img-blog.csdnimg.cn/direct/75724d532e1742779293723501b6476c.png)