首先,我自己学习过以后的直观感觉,通信协议是单片机的灵魂之一,只有规定好了通信协议我们才能够正确的接收到信息,才能实现更加深入的研究。所以这一部分是需要好好学习的。
本节借助一个可存储的芯片AT24C02,进行在I2C协议上的读取,实现掉电不丢失,永久存储数据并读取的工作。
一、I2C通信协议原理
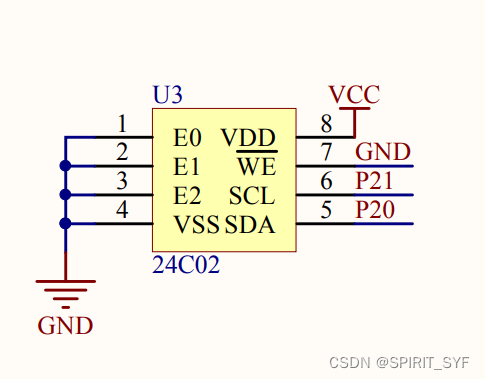
24C02的通讯方式是I2C,所以这个芯片端口的连接直接按照I2C所需直接预留出来。WE是写入使能,即可以存储内容。P2_1,2是控制我们写入时机,和内容的控制端口。后续讲完I2C通讯流程,大家应该就懂了。E0~2直接接地,是I2C的地址。
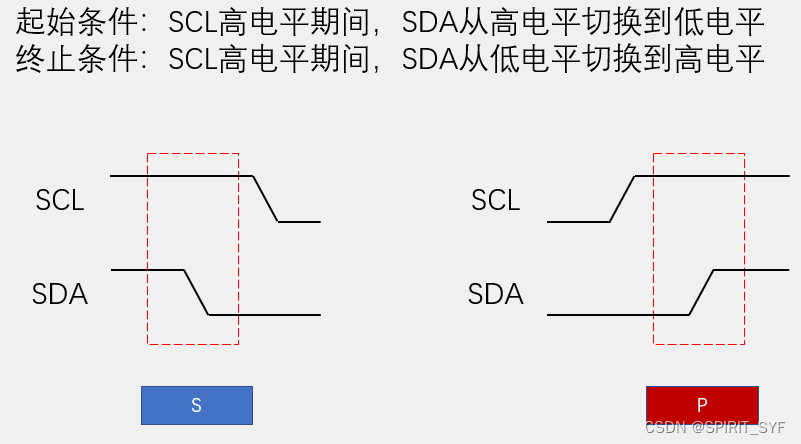
上图是I2C通信协议开始和结束的信号标志。
开始标志:在SCL高电平的时候,将数据线SDA下拉,从高电平到低电平。随后SCL拉低
结束标志:在SCL高电平的时候,将数据线SDA上拉,从低电平到高电平。 SCL提前拉高
 在收到开始信号以后,我们就可以发送数据了,现在讲数据怎么发送的。
在收到开始信号以后,我们就可以发送数据了,现在讲数据怎么发送的。
开始信号后,SCL=0,SDA=0。在SCL=0的期间,我们将数据放在SDA上,在下一次SCL=1时,从机读取数据。
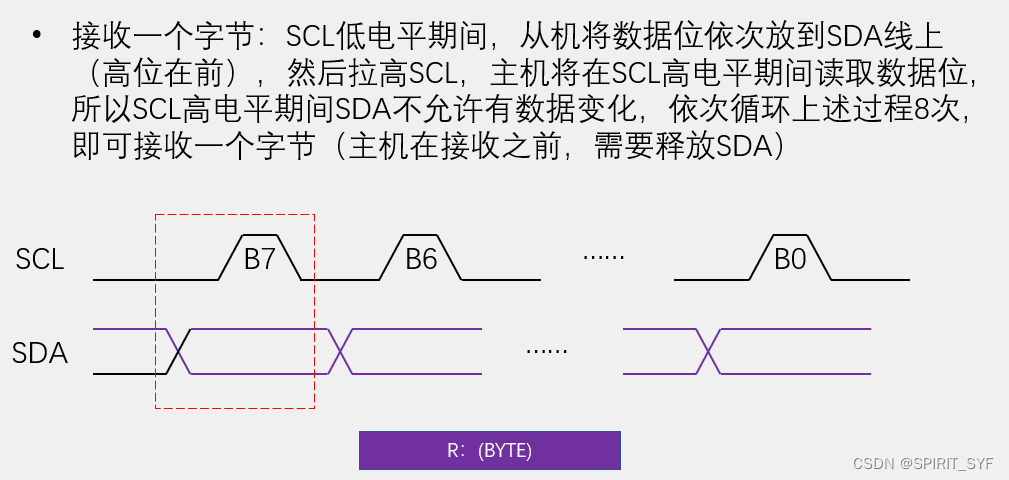
在讲数据怎么接收的。
开始前SCL=0,SDA=0。在SCL=0的期间,从机将数据放在SDA上,在下一次SCL=1时,主机读取刚才SDA写入的数据。注意,这里需要主机释放SDA线。

这一步其实是为了,确定从机是否接受,和确定从机是否发送完毕。保证系统通信的连贯和正确。

主机发送开始位,然后发送从机地址和设置为写模式,随后监听从机的接收应答,如果接收了,返回RA信号。然后主机开始发送数据,从机应答,以此往复,直到最后主机发送结束位。本次通信结束。
地址,前四位是厂家定的,加下来三位由电路板的连接确定,电路板全部连地,所以就是000.最后一位是1为读,0为写。

主机发送开始位,然后发送从机地址和设置为读模式,随后监听从机的接收应答,如果接收了,返回RA信号。然后从机开始发送数据,从机发送发送应答,以此往复,最后遇到SA=1时主机发送结束位。本次通信结束。
 这个就是将前两个组合起来,发送尾部去掉停止信号,直接加上接受操作。
这个就是将前两个组合起来,发送尾部去掉停止信号,直接加上接受操作。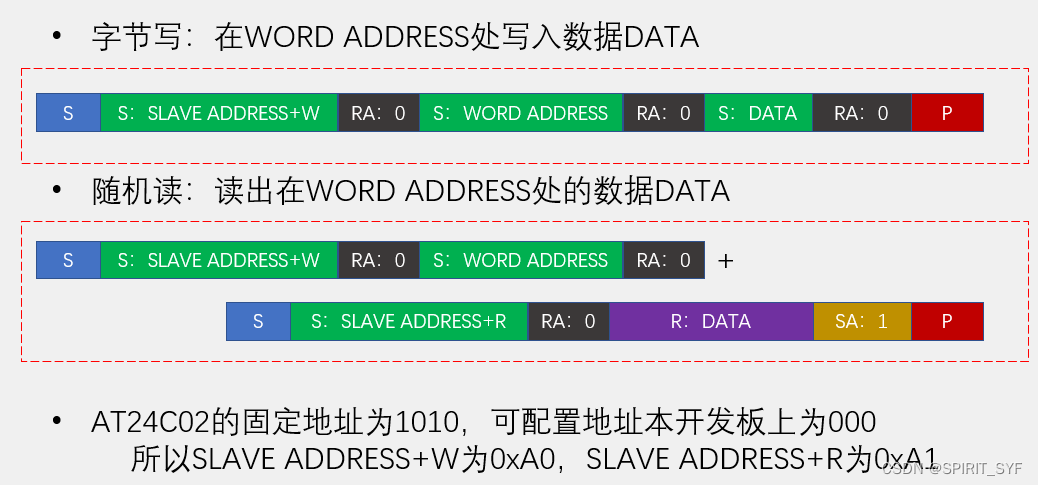
这里就是在指定位置写入、读取。
二、利用AT24C02 进行数据存储和读取
那么我们要借助I2C通信,我们就要写I2C的底层函数。
#include <REGX52.H>
sbit I2C_SCL=P2^1;
sbit I2C_SDA=P2^0;
/**
* @brief I2C开始
* @param 无
* @retval 无
*/
void I2C_Start(void)
{
I2C_SDA=1;
I2C_SCL=1;
I2C_SDA=0;
I2C_SCL=0;
}
/**
* @brief I2C停止
* @param 无
* @retval 无
*/
void I2C_Stop(void)
{
I2C_SDA=0;
I2C_SCL=1;
I2C_SDA=1;
}
/**
* @brief I2C发送一个字节
* @param Byte 要发送的字节
* @retval 无
*/
void I2C_SendByte(unsigned char Byte)
{
unsigned char i;
for(i=0;i<8;i++)
{
I2C_SDA=Byte&(0x80>>i);
I2C_SCL=1;
I2C_SCL=0;
}
}
/**
* @brief I2C接收一个字节
* @param 无
* @retval 接收到的一个字节数据
*/
unsigned char I2C_ReceiveByte(void)
{
unsigned char i,Byte=0x00;
I2C_SDA=1;
for(i=0;i<8;i++)
{
I2C_SCL=1;
if(I2C_SDA){Byte|=(0x80>>i);}
I2C_SCL=0;
}
return Byte;
}
/**
* @brief I2C发送应答
* @param AckBit 应答位,0为应答,1为非应答
* @retval 无
*/
void I2C_SendAck(unsigned char AckBit)
{
I2C_SDA=AckBit;
I2C_SCL=1;
I2C_SCL=0;
}
/**
* @brief I2C接收应答位
* @param 无
* @retval 接收到的应答位,0为应答,1为非应答
*/
unsigned char I2C_ReceiveAck(void)
{
unsigned char AckBit;
I2C_SDA=1;
I2C_SCL=1;
AckBit=I2C_SDA;
I2C_SCL=0;
return AckBit;
}
这一段代码看着很长,但是你如果只看大的模块,其实我们就是把刚才的开启、停止、发送、接收、发送应答、接收应答的时序逻辑表示出来了而已 。这些就是I2C的通信协议
#include <REGX52.H>
#include "I2C.h"
#define AT24C02_ADDRESS 0xA0
/**
* @brief AT24C02写入一个字节
* @param WordAddress 要写入字节的地址
* @param Data 要写入的数据
* @retval 无
*/
void AT24C02_WriteByte(unsigned char WordAddress,Data)
{
I2C_Start();
I2C_SendByte(AT24C02_ADDRESS);
I2C_ReceiveAck();
I2C_SendByte(WordAddress);
I2C_ReceiveAck();
I2C_SendByte(Data);
I2C_ReceiveAck();
I2C_Stop();
}
/**
* @brief AT24C02读取一个字节
* @param WordAddress 要读出字节的地址
* @retval 读出的数据
*/
unsigned char AT24C02_ReadByte(unsigned char WordAddress)
{
unsigned char Data;
I2C_Start();
I2C_SendByte(AT24C02_ADDRESS);
I2C_ReceiveAck();
I2C_SendByte(WordAddress);
I2C_ReceiveAck();
I2C_Start();
I2C_SendByte(AT24C02_ADDRESS|0x01);
I2C_ReceiveAck();
Data=I2C_ReceiveByte();
I2C_SendAck(1);
I2C_Stop();
return Data;
}
有了I2C的通信协议之后,我们的AT24C02就可以借助I2C的通信格式,编写自己的读写功能。这个也是刚才的逻辑图。
#include <REGX52.H>
#include "LCD1602.h"
#include "Key.h"
#include "AT24C02.h"
#include "Delay.h"
unsigned char KeyNum;
unsigned int Num;
void main()
{
LCD_Init();
LCD_ShowNum(1,1,Num,5);
while(1)
{
KeyNum=Key();
if(KeyNum==1) //K1按键,Num自增
{
Num++;
LCD_ShowNum(1,1,Num,5);
}
if(KeyNum==2) //K2按键,Num自减
{
Num--;
LCD_ShowNum(1,1,Num,5);
}
if(KeyNum==3) //K3按键,向AT24C02写入数据
{
AT24C02_WriteByte(0,Num%256);
Delay(5);
AT24C02_WriteByte(1,Num/256);
Delay(5);
LCD_ShowString(2,1,"Write OK");
Delay(1000);
LCD_ShowString(2,1," ");
}
if(KeyNum==4) //K4按键,从AT24C02读取数据
{
Num=AT24C02_ReadByte(0);
Num|=AT24C02_ReadByte(1)<<8;
LCD_ShowNum(1,1,Num,5);
LCD_ShowString(2,1,"Read OK ");
Delay(1000);
LCD_ShowString(2,1," ");
}
}
}
编写了底层的代码之后,我们在主函数里只需要,直接调用就好了。
三、利用定时器实现秒表
之前也实现了类似的功能,但是以前按键按下以后是阻塞的,不利于芯片的运行,现在使用定时器对按键扫描,克服以前的不足。
#include <REGX52.H>
#include "Timer0.h"
#include "Key.h"
#include "Nixie.h"
#include "Delay.h"
#include "AT24C02.h"
unsigned char KeyNum;
unsigned char Min,Sec,MiniSec;
unsigned char RunFlag;
void main()
{
Timer0_Init();
while(1)
{
KeyNum=Key();
if(KeyNum==1) //K1按键按下
{
RunFlag=!RunFlag; //启动标志位翻转
}
if(KeyNum==2) //K2按键按下
{
Min=0; //分秒清0
Sec=0;
MiniSec=0;
}
if(KeyNum==3) //K3按键按下
{
AT24C02_WriteByte(0,Min); //将分秒写入AT24C02
Delay(5);
AT24C02_WriteByte(1,Sec);
Delay(5);
AT24C02_WriteByte(2,MiniSec);
Delay(5);
}
if(KeyNum==4) //K4按键按下
{
Min=AT24C02_ReadByte(0); //读出AT24C02数据
Sec=AT24C02_ReadByte(1);
MiniSec=AT24C02_ReadByte(2);
}
Nixie_SetBuf(1,Min/10); //设置显示缓存,显示数据
Nixie_SetBuf(2,Min%10);
Nixie_SetBuf(3,11);
Nixie_SetBuf(4,Sec/10);
Nixie_SetBuf(5,Sec%10);
Nixie_SetBuf(6,11);
Nixie_SetBuf(7,MiniSec/10);
Nixie_SetBuf(8,MiniSec%10);
}
}
/**
* @brief 秒表驱动函数,在中断中调用
* @param 无
* @retval 无
*/
void Sec_Loop(void)
{
if(RunFlag)
{
MiniSec++;
if(MiniSec>=100)
{
MiniSec=0;
Sec++;
if(Sec>=60)
{
Sec=0;
Min++;
if(Min>=60)
{
Min=0;
}
}
}
}
}
void Timer0_Routine() interrupt 1
{
static unsigned int T0Count1,T0Count2,T0Count3;
TL0 = 0x18; //设置定时初值
TH0 = 0xFC; //设置定时初值
T0Count1++;
if(T0Count1>=20)
{
T0Count1=0;
Key_Loop(); //20ms调用一次按键驱动函数
}
T0Count2++;
if(T0Count2>=2)
{
T0Count2=0;
Nixie_Loop();//2ms调用一次数码管驱动函数
}
T0Count3++;
if(T0Count3>=10)
{
T0Count3=0;
Sec_Loop(); //10ms调用一次数秒表驱动函数
}
}
我们先看主要的逻辑,中断中,1、每次产生中断都要重新赋值;2、我们每20ms对独立按键进行扫描,判断当下的按键值;3、每2ms对数码管进行顺序刷新显示;4、每10ms,因为我们的毫秒只显示2位,所以我们每10ms显示依次新的毫秒数字,并并进位。
讲完了中断,我们关注一下主函数的内容,每当我们扫描得到了键码值以后,我们针对不同的键码值做不同的工作。按键一:修改计时器开始。按键二:数据清理。按键三:写入。案件四:从芯片读出,显示在数码表。
随后讲一下优势:
1、使用定时器,避免了延时函数占用CPU,从而提高效率。
2、使用定时器,定时扫描数码管,显示效果更好
void Nixie_Scan(unsigned char Location,Number)
{
P0=0x00; //段码清0,消影
switch(Location) //位码输出
{
case 1:P2_4=1;P2_3=1;P2_2=1;break;
case 2:P2_4=1;P2_3=1;P2_2=0;break;
case 3:P2_4=1;P2_3=0;P2_2=1;break;
case 4:P2_4=1;P2_3=0;P2_2=0;break;
case 5:P2_4=0;P2_3=1;P2_2=1;break;
case 6:P2_4=0;P2_3=1;P2_2=0;break;
case 7:P2_4=0;P2_3=0;P2_2=1;break;
case 8:P2_4=0;P2_3=0;P2_2=0;break;
}
P0=NixieTable[Number]; //段码输出
}
/**
* @brief 数码管驱动函数,在中断中调用
* @param 无
* @retval 无
*/
void Nixie_Loop(void)
{
static unsigned char i=1;
Nixie_Scan(i,Nixie_Buf[i]);
i++;
if(i>=9){i=1;}
}3、使用定时器,可以消除按键抖动,配合如下代码
void Key_Loop(void)
{
static unsigned char NowState,LastState;
LastState=NowState; //按键状态更新
NowState=Key_GetState(); //获取当前按键状态
//如果上个时间点按键按下,这个时间点未按下,则是松手瞬间,以此避免消抖和松手检测
if(LastState==1 && NowState==0)
{
Key_KeyNumber=1;
}
if(LastState==2 && NowState==0)
{
Key_KeyNumber=2;
}
if(LastState==3 && NowState==0)
{
Key_KeyNumber=3;
}
if(LastState==4 && NowState==0)
{
Key_KeyNumber=4;
}
}