ROS学习记录:栅格地图格式
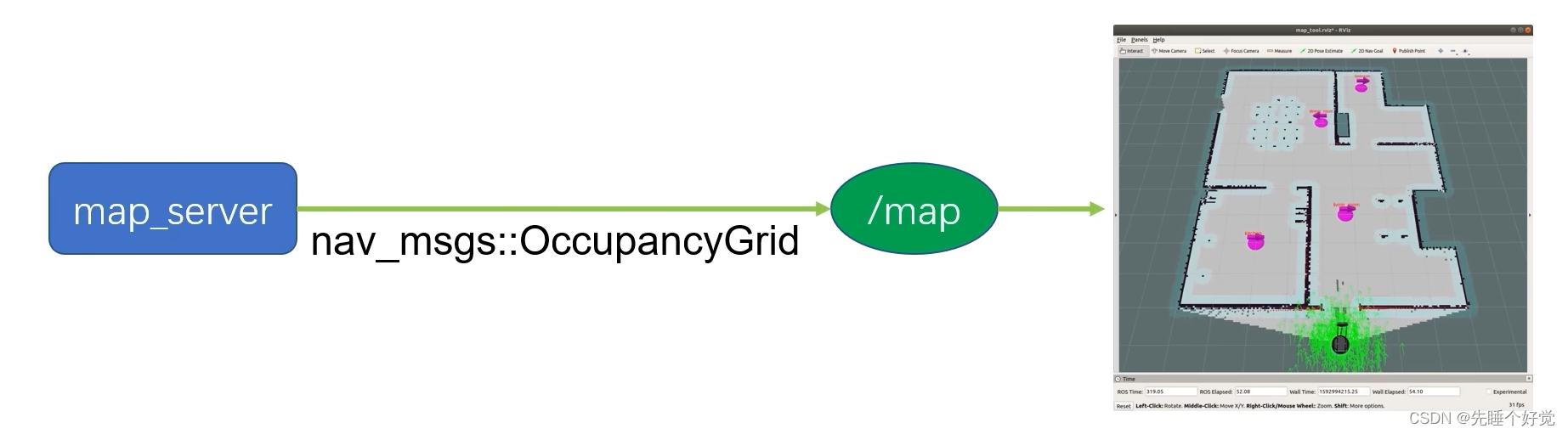
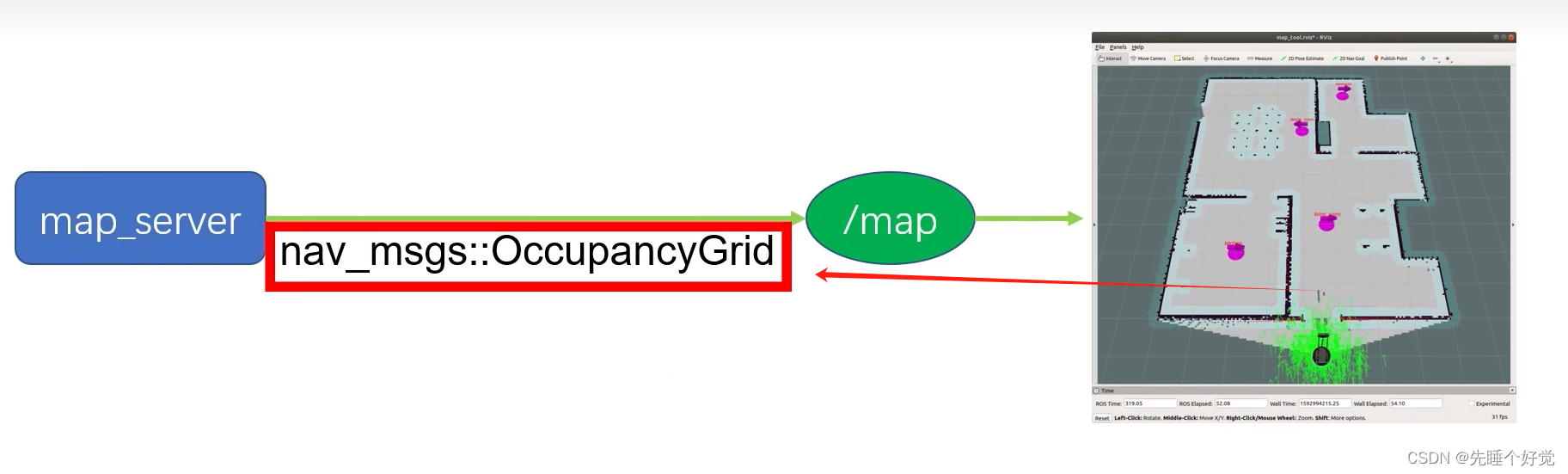
map_server节点 在话题 /map 中发布的消息数据,消息类型是nav_msgs消息包 中的OccupancyGrid ,它的中文意思的占据栅格 ,是一种正方形小格子组成的地图。
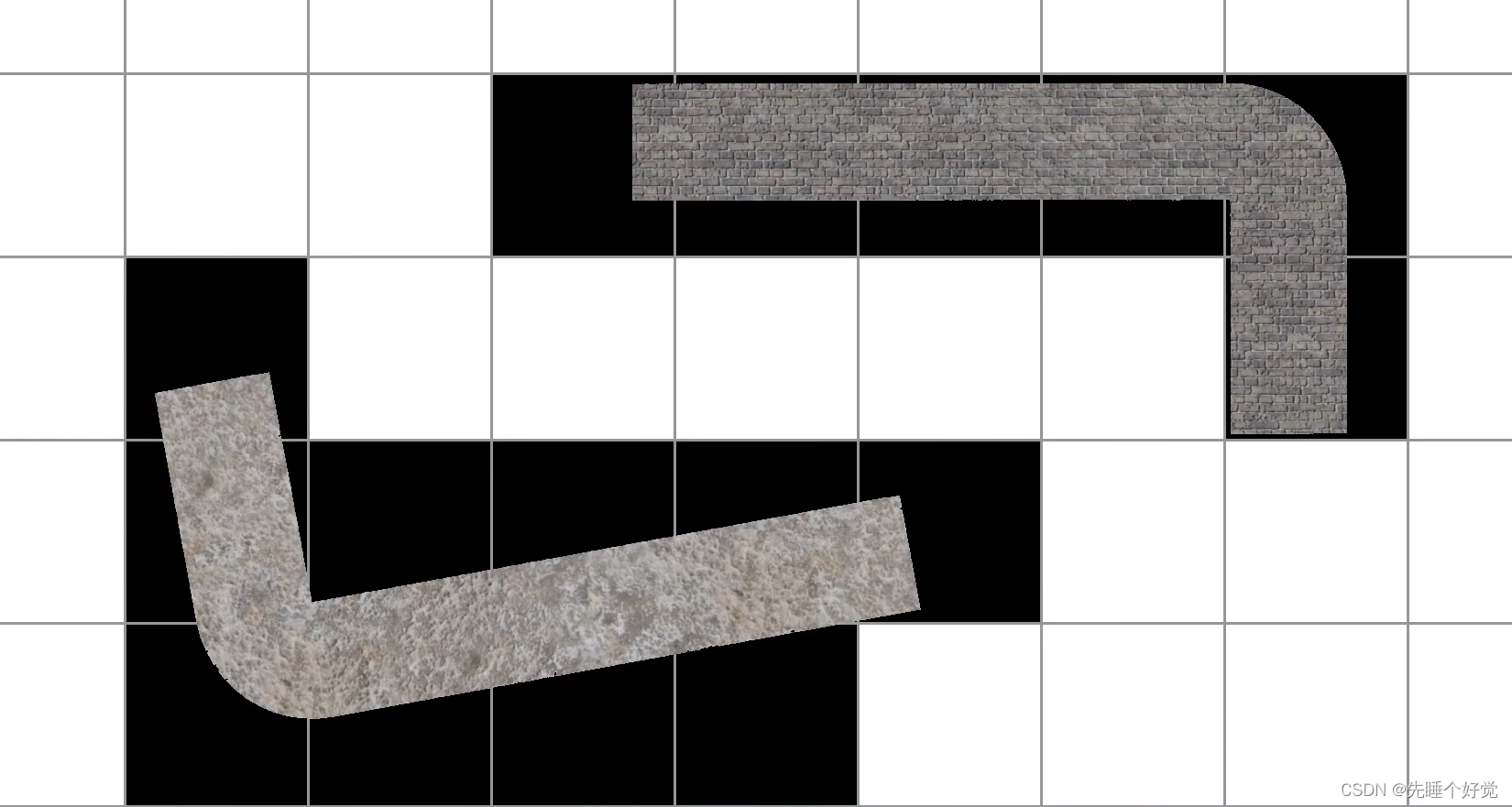
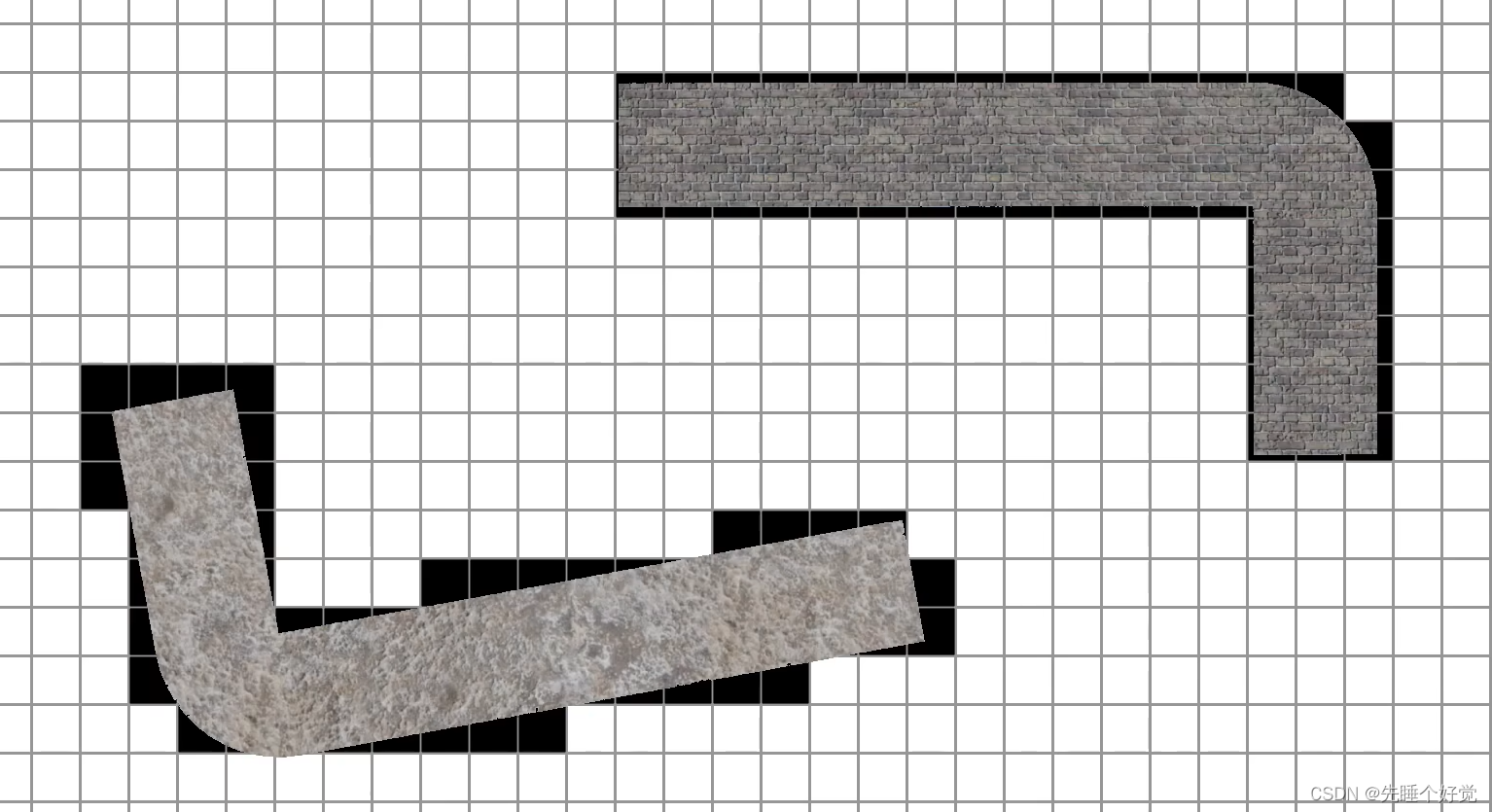
俯视 ,在地面上画出大小一样的正方形栅格 ,没被障碍物占据的栅格涂上白色 ,被障碍物占据到的栅格涂上黑色 。
栅格地图 。
尺寸划分的越小 ,黑色的区域越接近 障碍物的轮廓;但栅格越小 ,栅格就越多 ,地图的数据量就越大 。
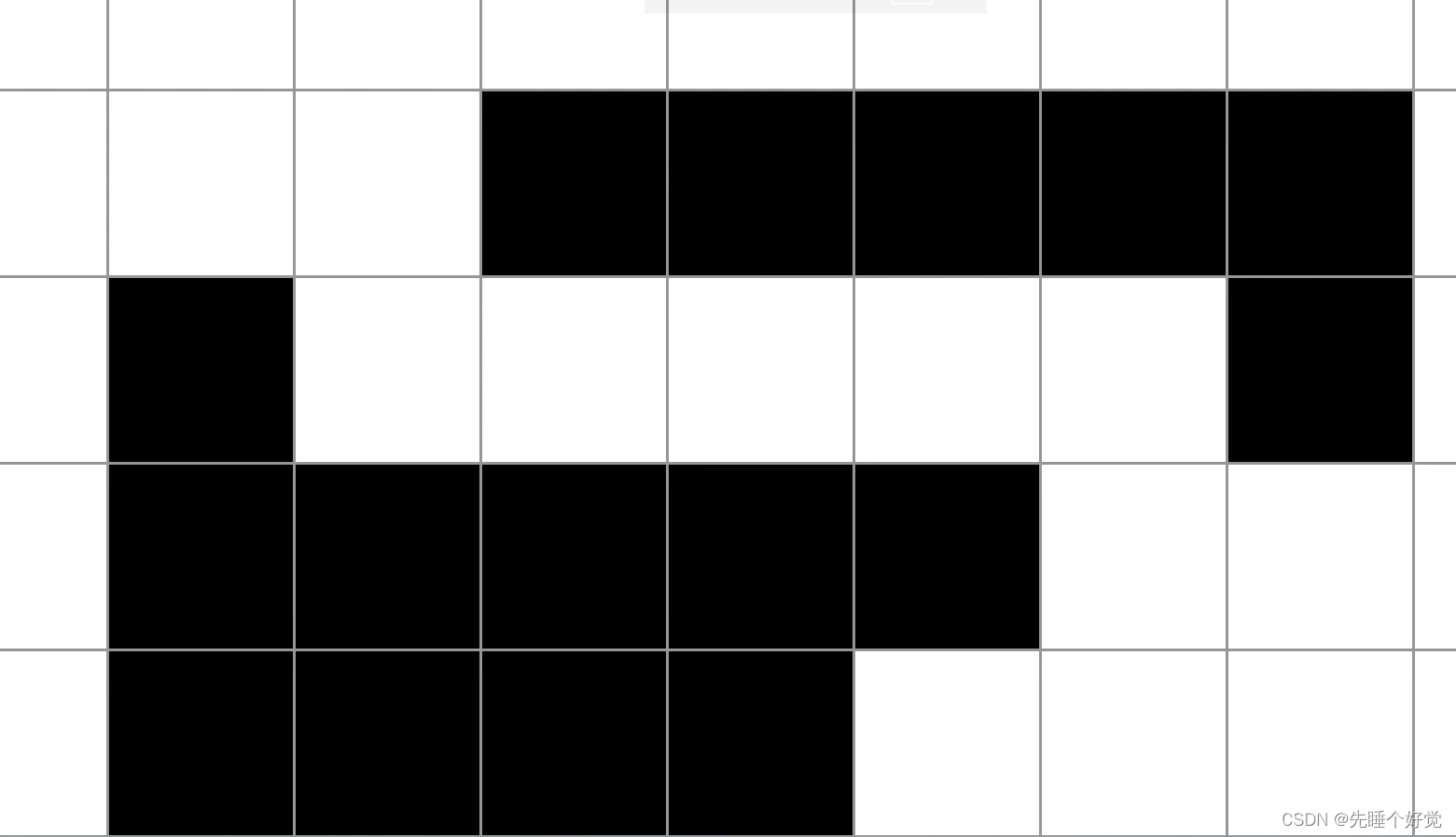
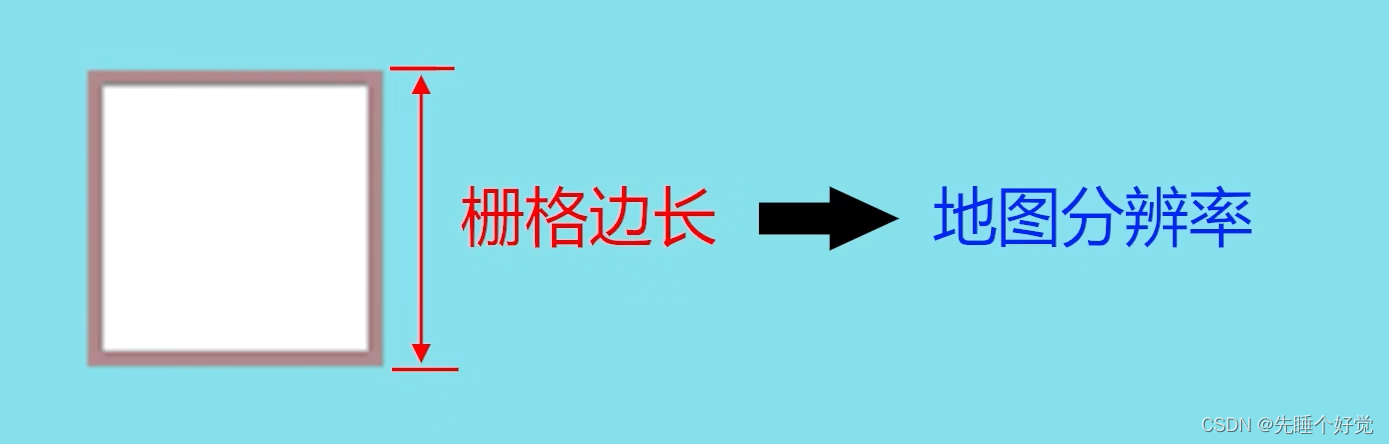
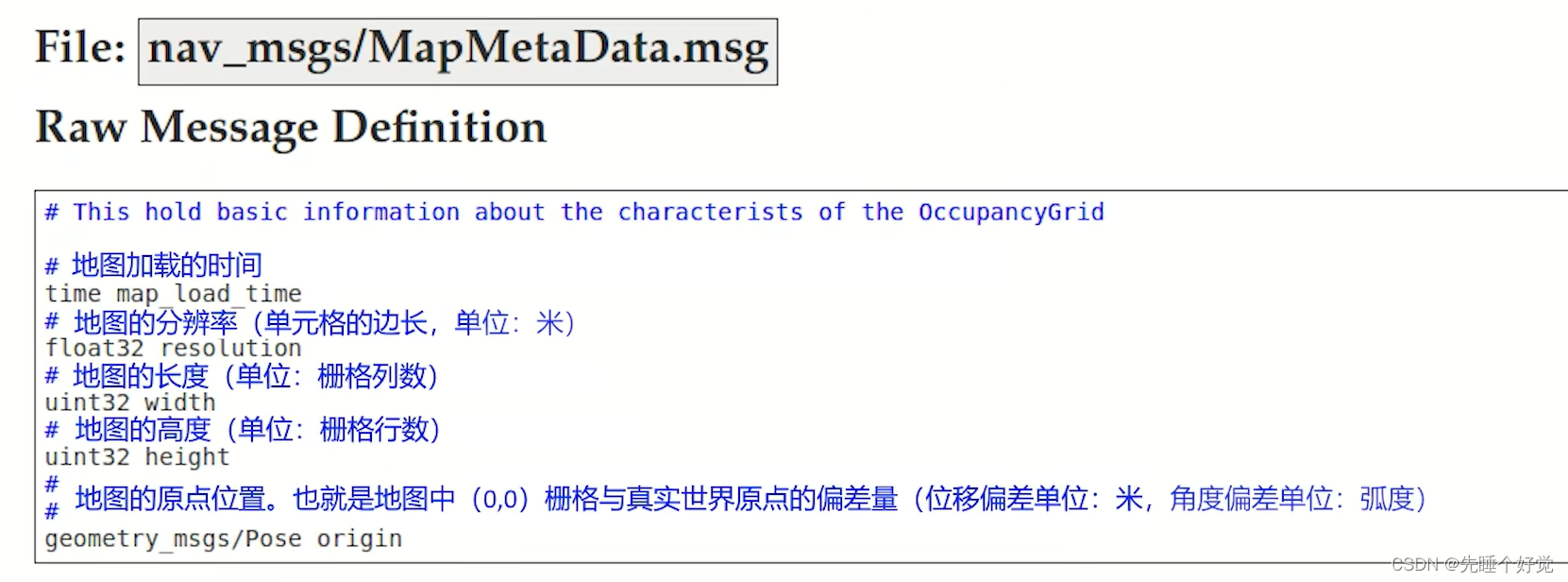
边长 ,就是栅格地图的分辨率 ,ROS中的栅格边长默认为5CM
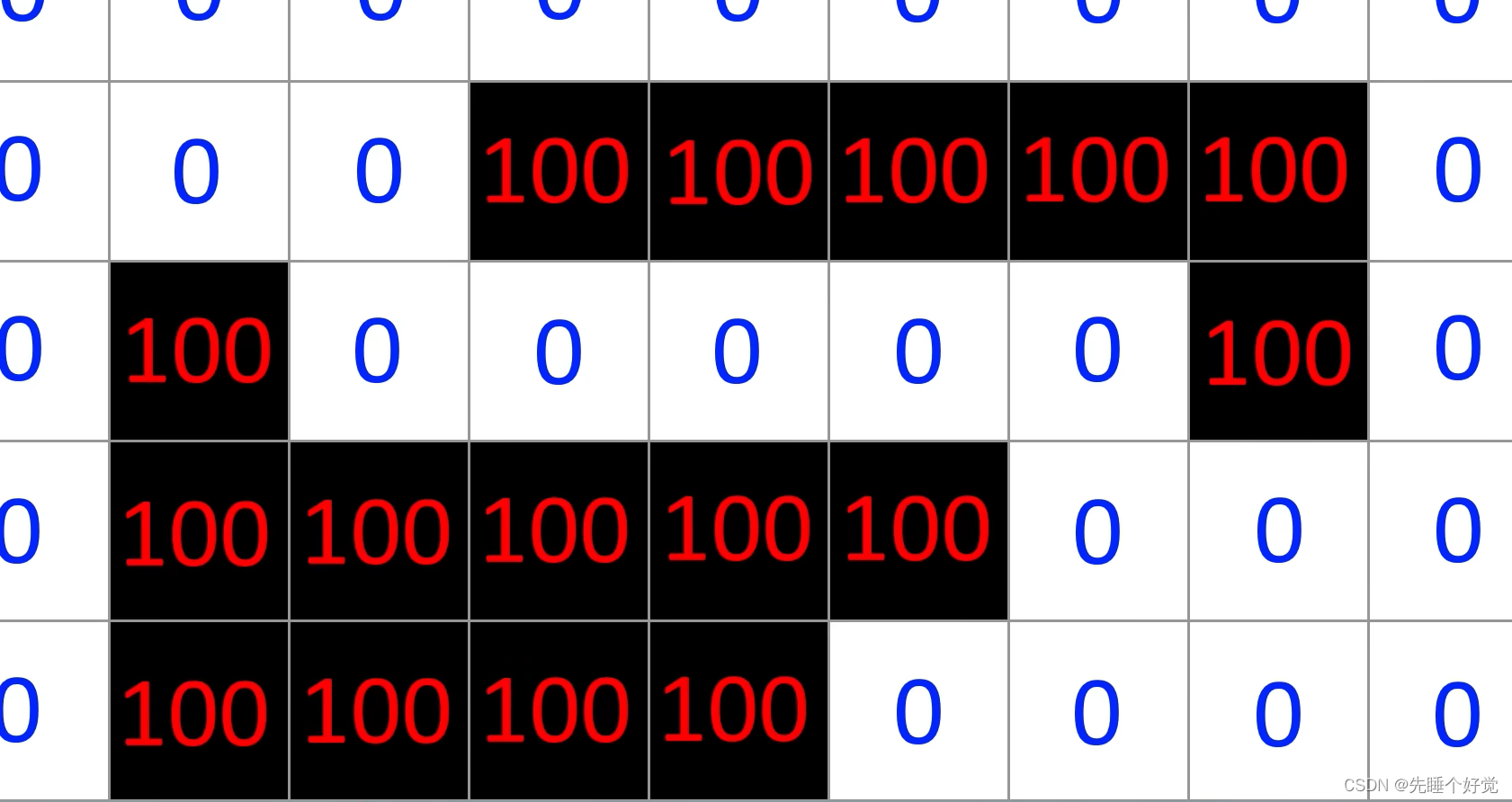
白色 是数字0 ,黑色 是数字100 ,
自下而上,从左向右 一行一行拼接起来,就得到一个数组,这个数组便描述了这个栅格地图的信息。
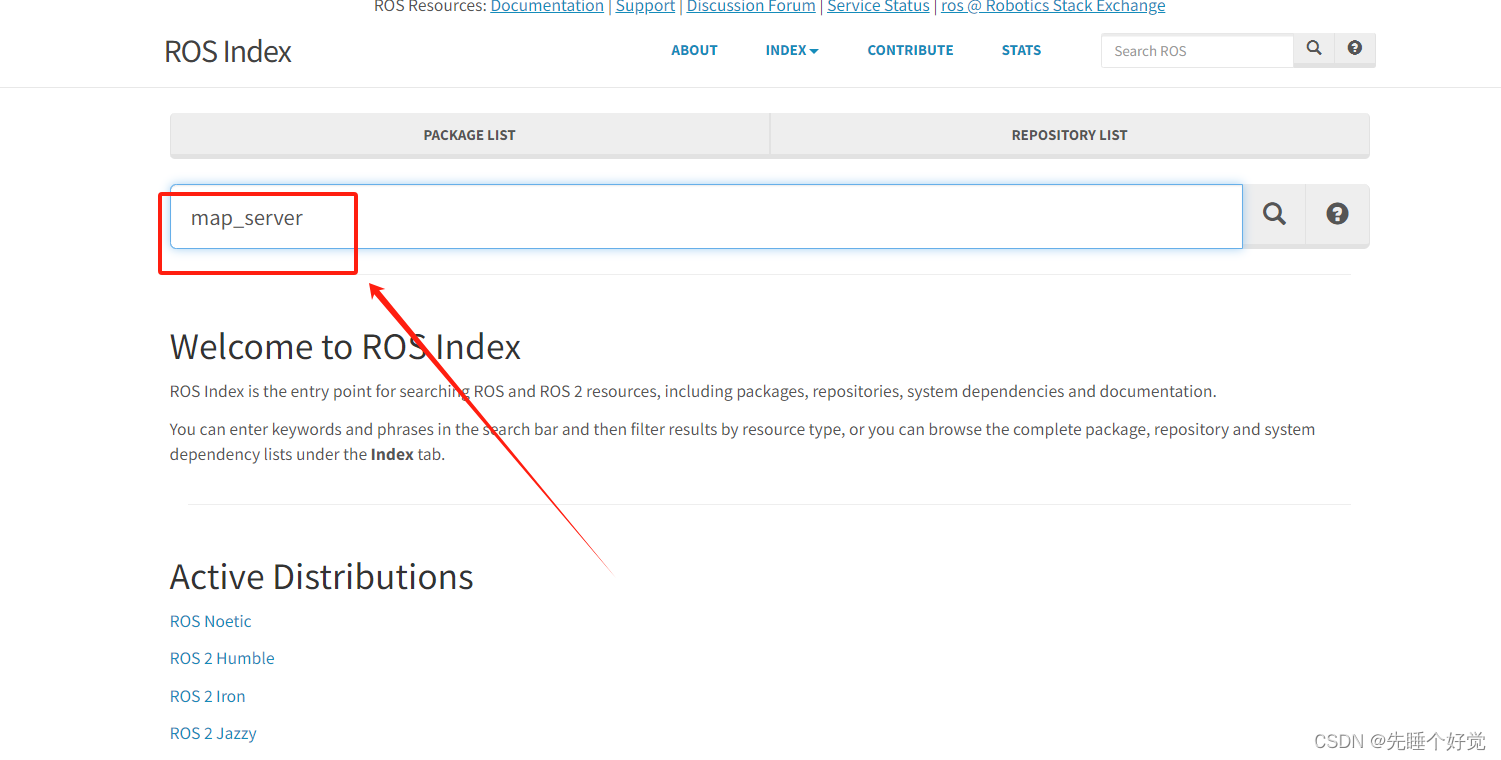
ROS index
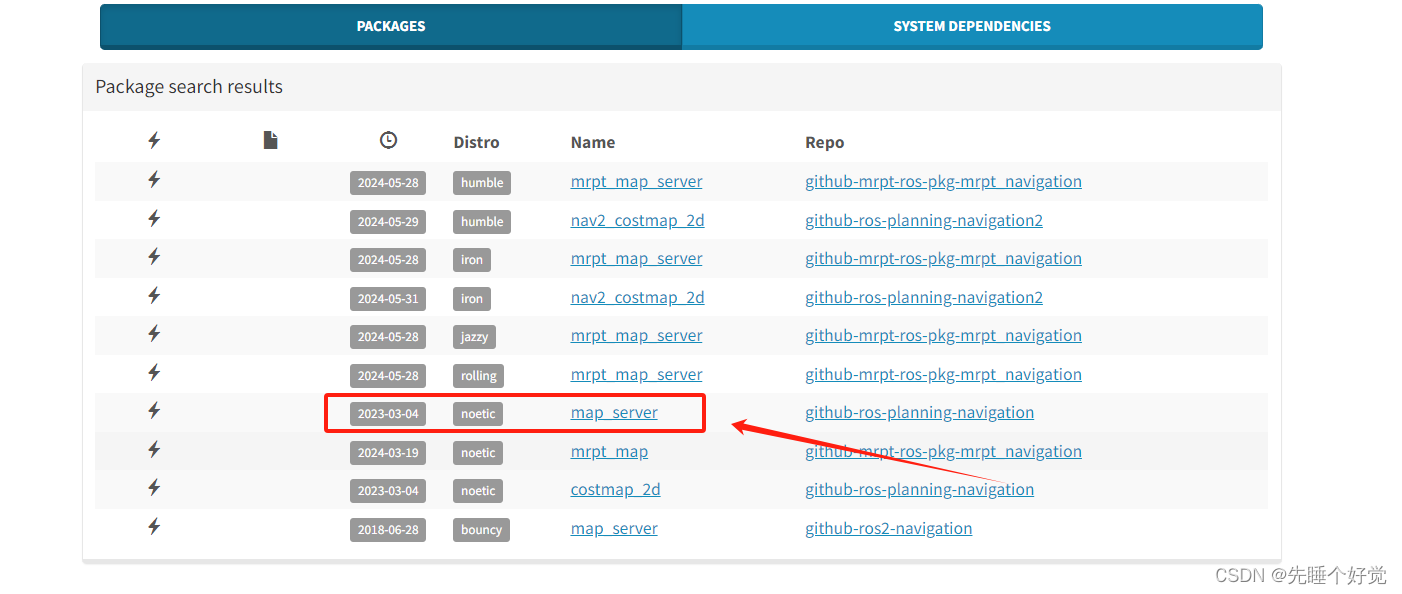
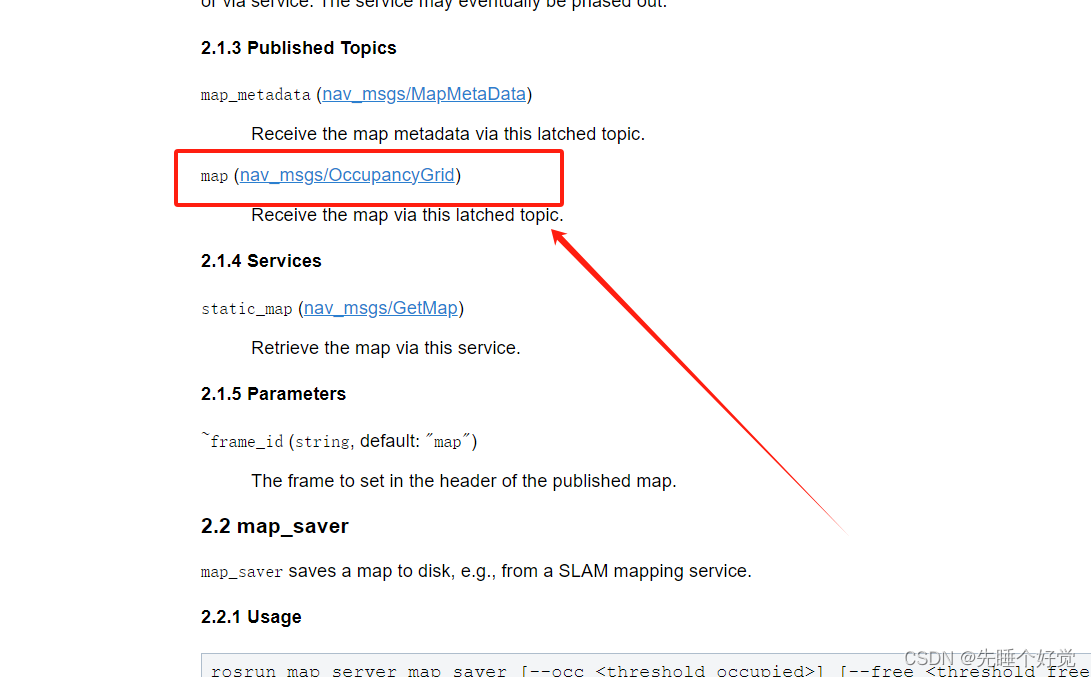
map_server 节点。
noetic 的版本
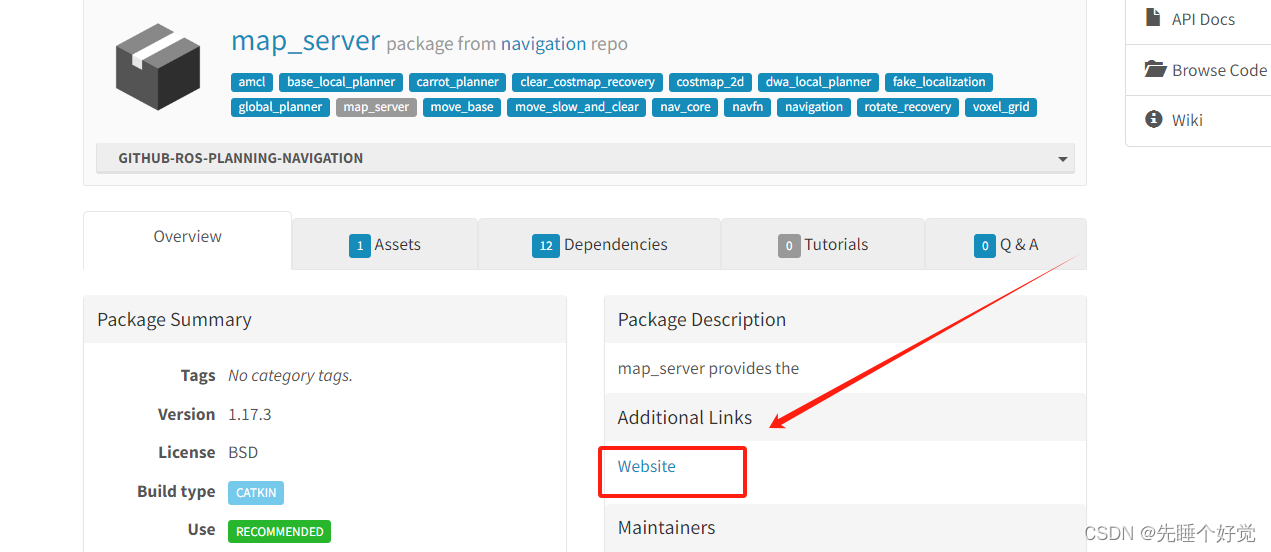
Website
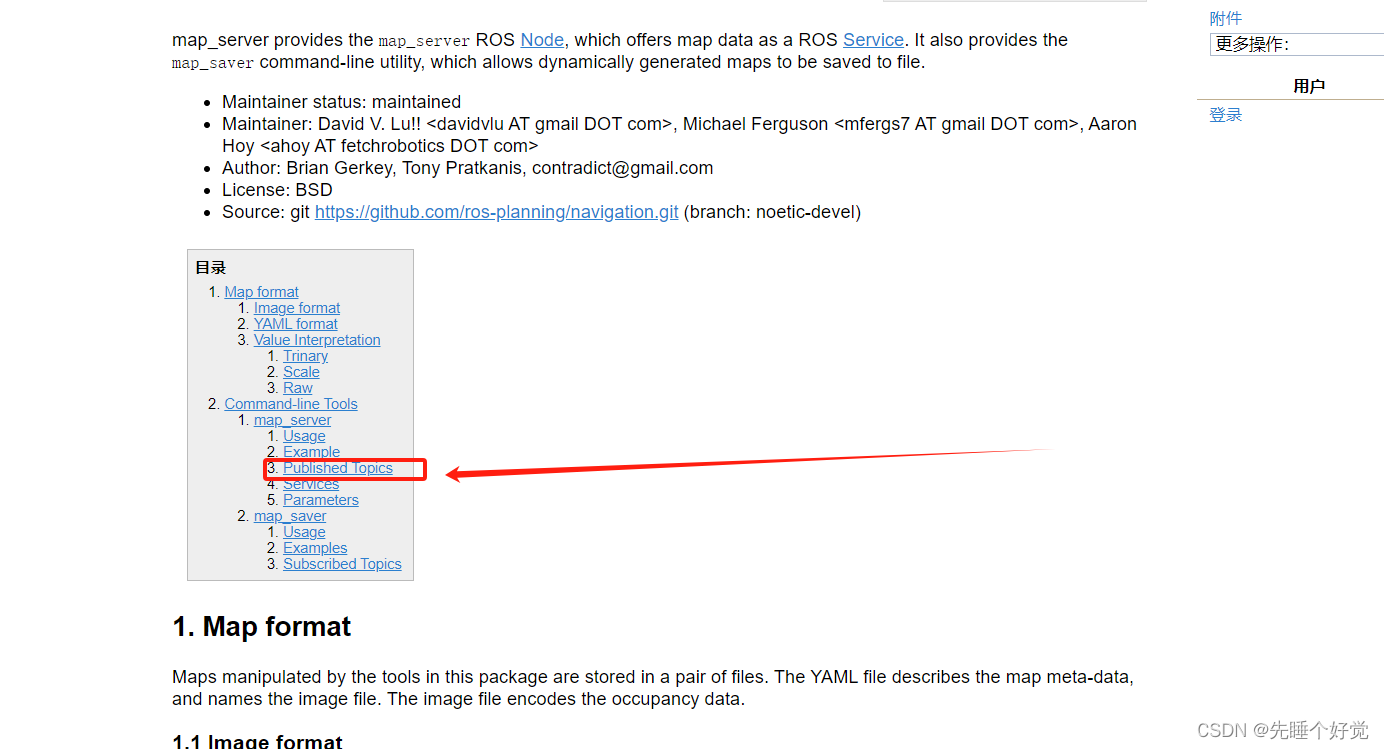
Published Topics
map 话题,消息类型是nav_msgs/OccupancyGrid ,点击它
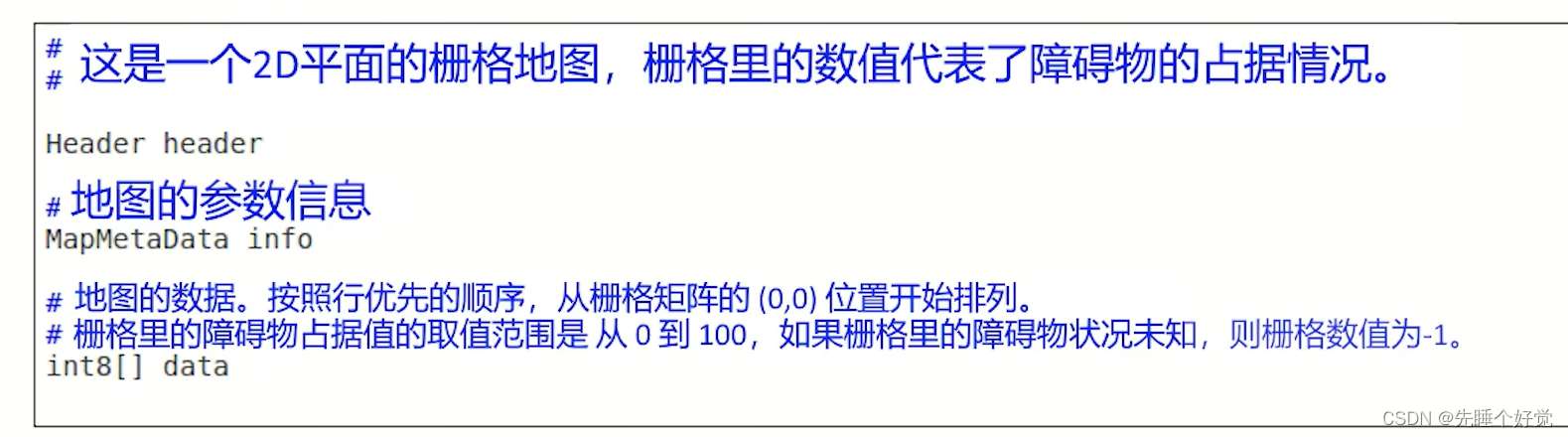
三个成员
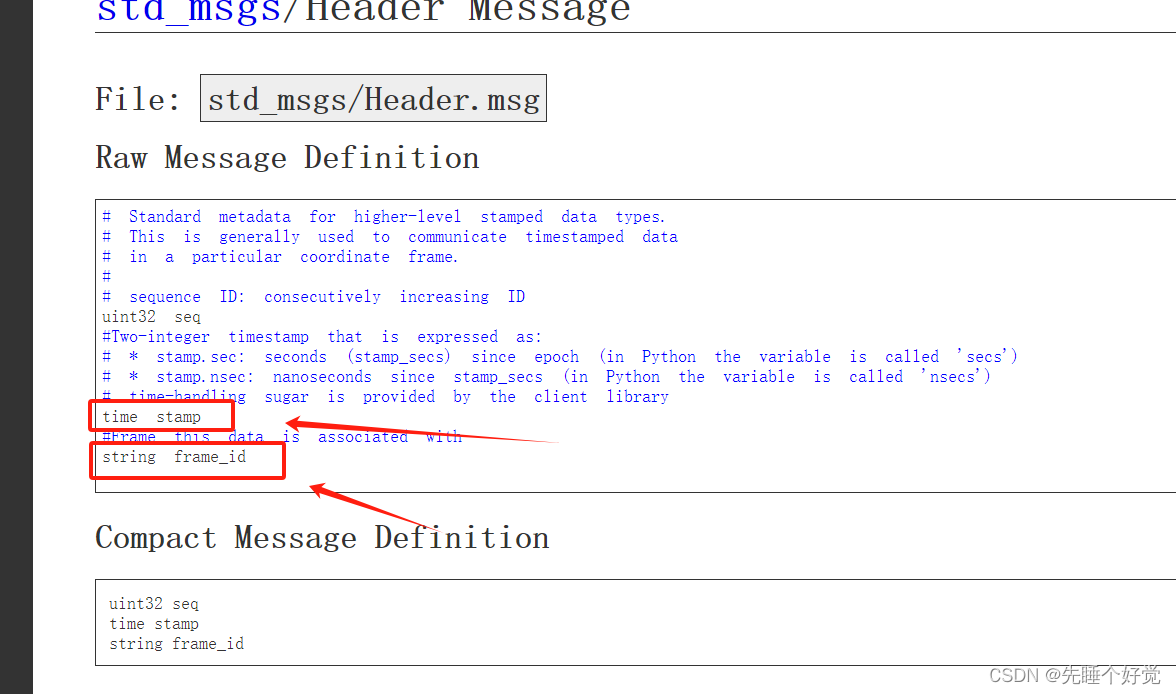
十六、header 里是时间戳 和坐标系ID
info 里面是地图的描述信息
data 便是描述栅格地图的数组
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/1803595.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!







![[Cloud Networking] Layer Protocol (continue)](https://img-blog.csdnimg.cn/direct/ccfe5144f1184ef29789898162bb7eda.png)