一、SPI的简介:
SPI 是英语Serial Peripheral interface的缩写,顾名思义就是串行外围设备接口。是Motorola首先在其MC68HCXX系列处理器上定义的。
SPI,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上占用四根线,SCK(Serial Clock)、MOSI(Master Output Slave Input)、MISI(Master Input Slave Output)、SS(Slave Select) ,其支持总线挂载多设备(一主多从)。主要应用在 EEPROM,FLASH,实时时钟,AD转换器,还有数字信号处理器和数字信号解码器之间。
SPI接口一般使用4条线通信:
MISO 主机输入从机输出。主机通过MOSI输入,从机通过MOSI输出。
MOSI 主机输出从机输入。主机通过MOSI输出,从机通过MOSI输入。
SCLK时钟线,完全由主机掌握,主要是产生时钟信号,由主设备产生。对于主机来说时钟线为输出,对于从机来说,所有时钟线为输入。
CS从设备片选信号,由主设备控制,低电平有效。主机选择从机时,只需要将连接对应的ss线置0就可以选择此从机了。相较于IIC,这种方法更简单但会浪费更多引脚,但无需IIC一样先进行寻址(SS线置0相当于寻址了)。
二、SPI时序介绍
1. spi四种模式详解:
在spi的模式配置中,有两个很关键的东西,即SPI_CR1的第0和1位: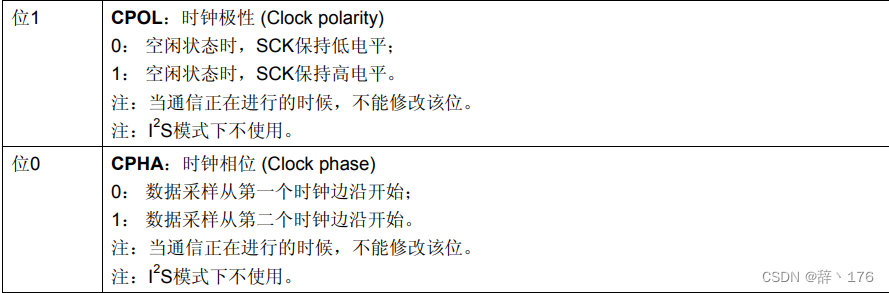
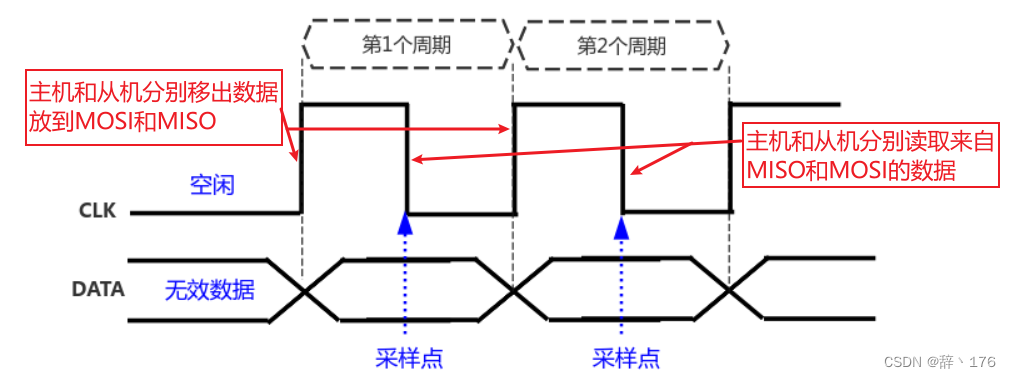
模式0:CPOL = 0、CPHA = 0
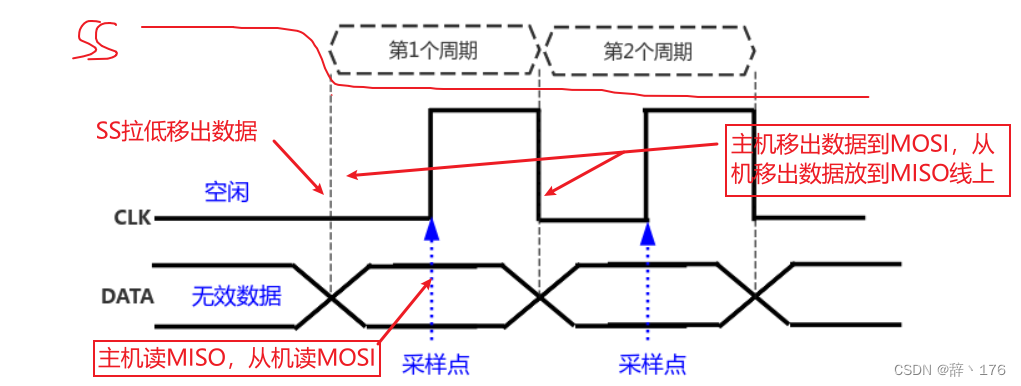
由于CPOL为0,也就是空闲状态下SCK为低电平;CPHA = 0,也就是从第一个边沿开始采样,也就是上升沿采样。下图是截取NRF24l01的读写时序图,为模式0;起始SCK为低电平,上升沿采样。下降沿移出数据为下一次采样做准备。 由于第一个上升沿就要采样数据,所以得在第一个上升沿就要把数据移出,也就是把CSN的下降沿当作时钟的一部分了。从图中可以看见,CSN下降沿时数据变化(主机输出数据最高位,将数据放于MOSI线上),然后第一个上升沿采样(主机和从机读取数据,主机读从机的最高位,从机读主机的数据最高位),第一个下降沿主机输出次高位(当然,从机也会动作,但从机不需要我们操作),再第二上升沿采样......即先有了下降沿才能有数据变换的条件。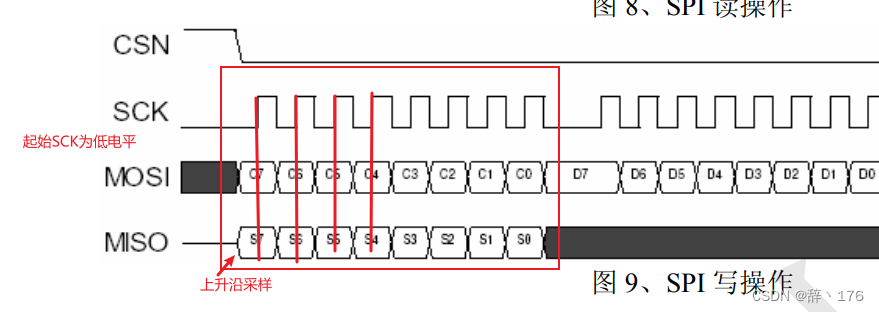
第一个时序代码如下:CSN 在选择从机时会拉低,所以这里没写,拉低SS后,主机移出数据,方便从机在下一个上升沿读。此时拉高SCK,主机读从机发来的数据,从机也会读主机发来的数据,注意,为高位先行。然后拉低SCK,主机和从机输出数据,方便下个上升沿读取数据,这样,第一个周期时序就完成了,接下来只需for循环8次就可以了,这样就完成了一次数据交换。和IIC不同的是IIC有读写函数,而SPI读写是同时进行的。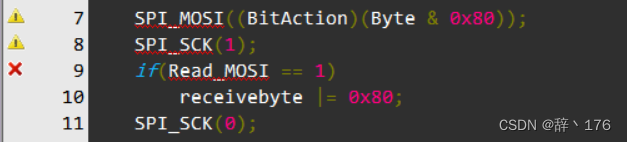
uint8_t MySPI_SW_Byte(uint8_t Byte)
{
uint8_t receivebyte = 0x00;
for(uint8_t i=0;i<8;i++)
{
SPI_MOSI((BitAction)(Byte & 0x80));
SPI_SCK(1);
if(Read_MOSI == 1)
receivebyte |= 0x80;
SPI_SCK(0);
}
return receivebyte;
}
模式1:CPOL = 0、CPHA = 1
由于CPOL为0,也就是空闲状态下SCK为低电平;CPHA = 1,也就是从第一个边沿开始移出数据。此时主机将数据最高位放到MOSI线上,从机将数据放到MISO上,也就是上升沿输出。第二个边沿(下降沿)移入数据,即读取数据(主机读MISO,从机读MOSI)到这里完成了一个时序周期。
模式2:CPOL = 1、CPHA = 0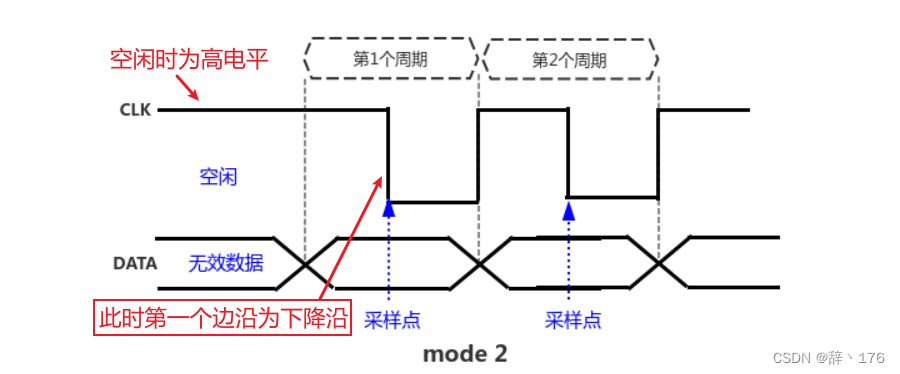
由于CPOL为0,也就是空闲状态下SCK为高电平;CPHA = 0,也就是从第一个边沿开始移入数据(注:由于空闲时为高电平,所以第一个边沿变成了下降沿)。此时读取数据(主机读MISO,从机读MOSI)。第二个边沿(上升沿)移出数据,主机将数据最高位放到MOSI线上,从机将数据放到MISO上,也就是上升沿输出。到这里完成了一个时序周期即。
模式3:CPOL = 1、CPHA = 1
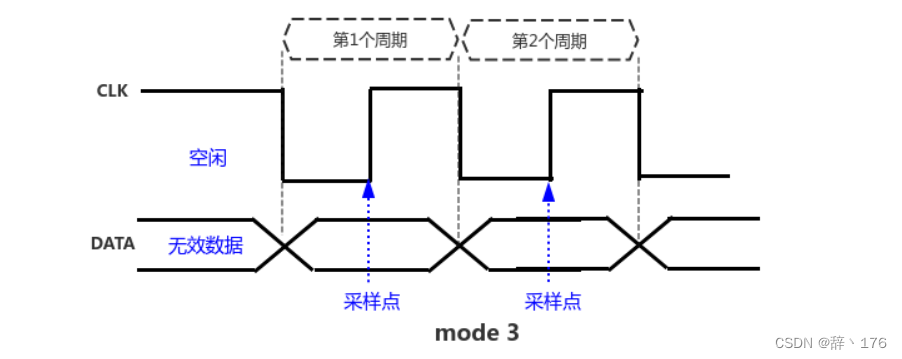
由于CPOL为1,也就是空闲状态下SCK为高电平;CPHA = 1,也就是从第一个边沿(下降沿)开始移出数据。此时主机将数据最高位放到MOSI线上,从机将数据放到MISO上,也就是下降沿输出。第二个边沿(上升沿)移入数据,即读取数据(主机读MISO,从机读MOSI)到这里完成了一个时序周期。
三、SPI的初始化
下面进行SPI的初始化:
由于我们采用的是软件SPI,所以MOSI和SCK配置为推挽输出,而MISO是从机输出线,从机掌握主动权,所以配置为上拉输入。
void MySPI_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;//定义一个GPIO_InitTypeDef类型的结构体
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);//开启GPIO端口时钟
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_5 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP;//通用推挽输出
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;//引脚速率50MHZ
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_6;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU;//上拉输入
GPIO_Init(GPIOA, &GPIO_InitStructure);
SPI_SCK(0);
}即SPI代码如下:
spi.c
#include "spi.h"
void MySPI_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;//定义一个GPIO_InitTypeDef类型的结构体
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);//开启GPIO端口时钟
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_5 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP;//通用推挽输出
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;//引脚速率50MHZ
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_6;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU;//上拉输入
GPIO_Init(GPIOA, &GPIO_InitStructure);
SPI_SCK(0);
}
uint8_t MySPI_SW_Byte(uint8_t Byte)
{
uint8_t receivebyte = 0x00;
for(uint8_t i=0;i<8;i++)
{
SPI_MOSI((BitAction)(Byte & (0x80>>i)));
SPI_SCK(1);
if(Read_MOSI == 1)
receivebyte |= (0x80>>i);
SPI_SCK(0);
}
return receivebyte;
}
spi.h
#ifndef __SPI_H
#define __SPI_H
#include "stm32f10x.h" // Device header
#include "sys.h"
#define SPI_MOSI(x) GPIOA->BSRR = GPIO_Pin_7<<(16*(!x))
#define SPI_SCK(x) GPIOA->BSRR = GPIO_Pin_5<<(16*(!x))
#define Read_MOSI PAin(7) //输入MOSI
void MySPI_Init(void);
uint8_t MySPI_SW_Byte(uint8_t Byte);
#endif
下一章将讲如何使用2.4G模块。









![[office] excel工作表数据分级显示 #其他#笔记](https://img-blog.csdnimg.cn/img_convert/d80c080c4c822cf38f9244dcfa33c347.jpeg)

