1、什么是ADAS
ADAS(Advanced Driving Assistance System)也就是高级驾驶辅助系统,是无人驾驶的过渡。
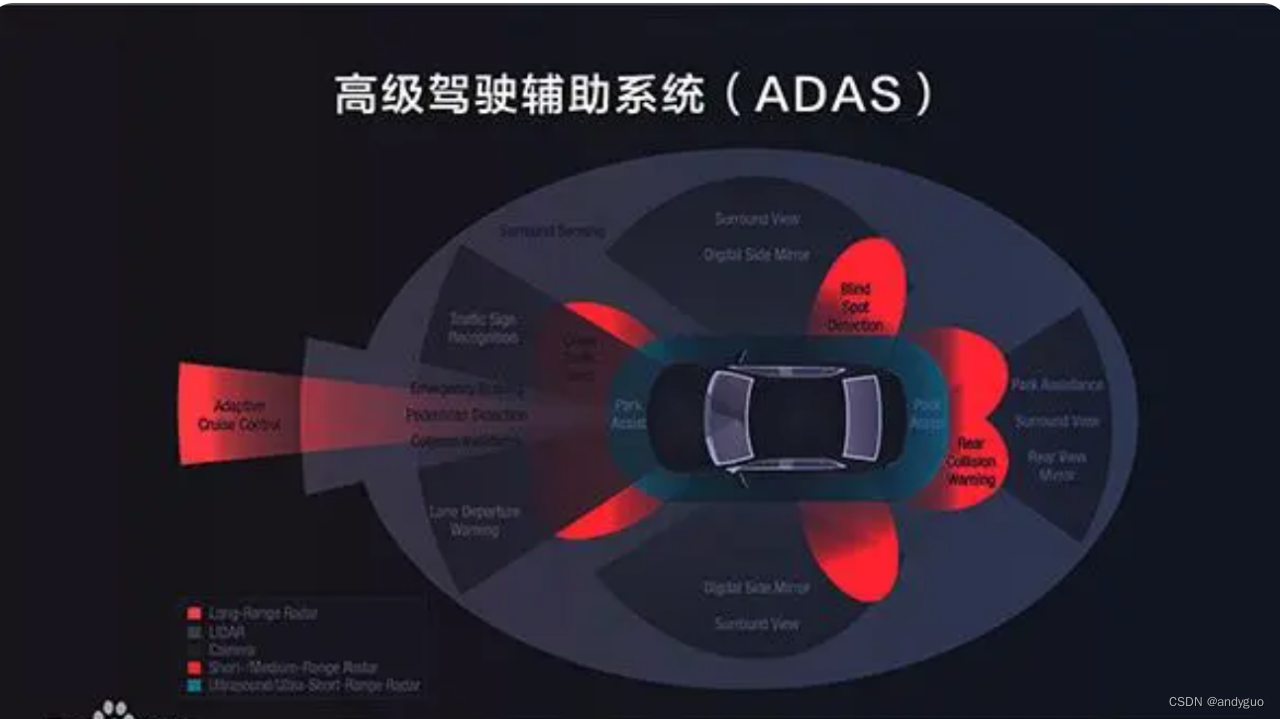
ADAS利用安装在车上的各式各样传感器(毫米波雷达、激光雷达、单\双目摄像头以及卫星导航),在汽车行驶过程中随时来感应周围的环境,收集数据,进行静态、动态物体的辨识、侦测与追踪,并结合导航地图数据,进行系统的运算与分析,从而预先让驾驶者察觉到可能发生的危险,有效增加汽车驾驶的舒适性和安全性。
ADAS 采用的传感器主要有摄像头、雷达、激光和超声波等,可以探测光、热、压力或其它用于监测汽车状态的变量, 通常位于车辆的前后保险杠、侧视镜、驾驶杆内部或者挡风玻璃上。
早期的ADAS 技术主要以被动式报警为主,当车辆检测到潜在危险时, 会发出警报提醒驾车者注意异常的车辆或道路情况。
2、ADAS常用术语有那些:
一、信息辅助类术语
1)DFM(driver fatigue monitoring,驾驶员疲劳监测),实时监测驾驶员状态并在确认其疲劳时发出提示信息。
2)DAM(driver attention monitoring,驾驶员注意力监测),实时监测驾驶员状态并在确认其注意力分散时发出提示信息。
3)TSR(traffic signs recognition,交通标志识别),自动识别车辆行驶路段的交通标志并发出提示信息。
4)ISLI(intelligent speed limit information,智能限速提示),自动获取车辆当前条件下所应遵守的限速信息并实时监测车辆行驶速度,当车辆行驶速度不符合或即将超出限速范围的情况下适时发出提示信息。
5)CSW(curve speed warning,弯道速度预警),对车辆状态和前方弯道进行监测,当行驶速度超过弯道的安全通行车速时发出警告信息。
6)HUD(head-up display,抬头显示),将信息显示在驾驶员正常驾驶时的视野范围内,使驾驶员不必低头就可以看到相应的信息。
7)AVM(around view monitoring,全景影像监测),向驾驶员提供车辆周围360℃范围内环境的实时影像信息。
8)NV(night vision,夜视),在夜间或其它弱光行驶环境中为驾驶员提供视觉辅助或警告信息。
9)FDM(forward distance monitoring,前向车距监测),实时监测本车与前方车辆车距,并以空间或时间距离等方式显示车距信息。
10)FCW(forward collision warning,前向碰撞预警),实时监测车辆前方行驶环境,并在可能发生前向碰撞危险时发出警告信息。
11)ROW(rear collision warning,后向碰撞预警),实时监测车辆后方环境,并在可能受到后方碰撞危险时发出警告信息。
12)LDW(lane departure warning,车道偏离预警),实时监测车辆在本车道的行驶状态,并在出现或即将出现非驾驶意愿的车道偏离时发出警告信息。
13)LCW(lane changing warning,变道碰撞预警),在车辆变道过程中,实时监测相邻车道,并在车辆侧方和/或侧后方出现可能与本车发生碰撞危险 的其它道路使用者时发出警告信息。
14)BSD(blind spot detection,盲区监测),实时监测驾驶员视野盲区,并在其盲区内出现其它道路使用者时发出提示或警告信息。
15)SBSD(side blind spot detection,侧面盲区监测),实时监测驾驶员视野的侧方及侧后方盲区,并在其盲区内出现其它道路使用者时发出提示或警告信息。
16)STBSD(steering blind spot detection,转向盲区监测),在车辆转向过程中,实时监测驾驶员转向盲区,并在其盲区内出现其它道路使用者时发出警告信息。
17)RCTA(rear cross traffic alert,后方交通穿行提示),在车辆倒车时,实时监测车辆后部横向接近的其它道路使用者,并在可能发生碰撞危险时发出警告信息。
18)FCTA(front cross traffic alert,前方交通穿行提示),在车辆低速前进时,实时监测车辆前部横向接近的其它道路使用者,并在可能发生碰撞危险时发出警告信息。
19)DOW(door open warning,车门开启预誓),在停车状态即将开启车门时,监测车辆侧方及侧后方的其它道路使用者,并在可能因车门开启而发生碰撞危险时发出警告信息。
20)RCA(reversing condition assist,倒车辅助),在车辆倒车时,实时监测车辆后方环境,并为驾驶员提供影像或警告信息。
21)MALSO(maneuvering aid for low speed operation,低速行车辅助),在车辆低速行驶时,探测其周围障碍物,并当车辆靠近障碍物时为驾驶员提供影像或警告信息。
二、控制辅助类术语
1)AEB(advanced/automatic emergency braking,自动紧急制动),实时监测车辆前方行驶环境,并在可能发生碰撞危险时自动启动车辆制动系统使车辆减速,以避免 碰撞或减轻碰撞后果。
2)EBA(emergency braking assist,紧急制动辅助),实时监测车辆前方行驶环境,在可能发生碰撞危险时提前采取措施以减少制动响应时间并在驾驶员 采取制动操作时辅助增加制动压力,以避免碰撞或减轻碰撞后果。
3)AES(automatic emergency steering,自动紧急转向),实时监测车辆前方、侧方及侧后方行驶环境,在可能发生碰撞危险时自动控制车辆转向,以避免碰 撞或减轻碰撞后果。
4)ESA(emergency steering assist,紧急转向辅助),实时监测车辆前方、侧方及侧后方行驶环境,在可能发生碰撞危险且驾驶员有明确的转向意图时辅助驾驶员进行转向操作。
5)ISLC(intelligent speed limit control ,智能限速控制),自动获取车辆当前条件下所应遵守的限速信息,实时监测并辅助控制车辆行驶速度,以使其保持在限速范围之内。
6)LKA(lane keeping assist,车道保持辅助),实时监测车辆与车道边线的相对位置,持续或在必要情况下控制车辆横向运动,使车辆保持在原车道内行驶。
7)LCC(lane centering control,车道居中控制),实时监测车辆与车道边线的相对位置,持续自动控制车辆横向运动,使车辆始终在车道中央区域行驶。
8)LDP(lane departure prevention,车道偏离抑制),实时监测车辆与车道边线的相对位置,在车辆将发生车道偏离时控制车辆横向运动,辅助驾驶员将车辆保持在原车道内行驶。
9)IPA(intelligent parking assist,智能泊车辅助),在车辆泊车时,自动检测泊车空间并为驾驶员提供泊车指示和/或方向控制等辅助功能。
10)ACC(adaptive cruise control ,自适应巡航控制),实时监测车辆前方行驶环境,在设定的速度范围内自动调整行驶速度,以适应前方车辆和/或道路条件等引起的驾驶环境变化。
11)FSRA(full speed range adaptive cruise control ,全速自适应巡航控制),实时监测车辆前方行驶环境,在设定的速度范围内自动调整行驶速度并具有减速至停止及从停止状态自动起步的功能,以适应前方车辆和 / 或道路条件等引起的驾驶环境变化。
12)TJA(traffic jam assist,交通拥堵辅助),在车辆低速通过交通拥堵路段时,实时监测车辆前方及相邻车道行驶环境,并自动对车辆进行横向和纵向控制,其中部分功能的使用需经过驾驶员的确认。
13)AMAP(anti-ma I operation for accelerator pedal ,加速踏板防误踩),在车辆起步或低速行驶时,因驾驶员误踩加速踏板产生紧急加速而可能与周边障碍物发生碰撞时, 自动抑制车辆加速。
14)AIL(alcohol interlock,酒精闭锁),在车辆启动前测试驾驶员体内酒精含量,并在酒精超标时锁闭车辆动力系统开关。
15)ADB(adaptive driving beam,自适应远光灯),能够自动调整投射范围以减少对前方或对向其它车辆驾驶员炫目干扰的远光灯。
16)AFL(adaptive front light,自适应前照灯),能够自动进行近光/远光切换或投射范围控制,从而为适应车辆各种使用环境提供不同类型光束的前照灯。
3、为什么要进行HiL测试:
市场上ADAS传感器型号、参数、性能多种多样,不同传感器协同工作有效性难以保证;路测成本大、周期长、测试覆盖度不全面、测试危险程度高;而ADAS HiL测试系统能够实现在实验室环境下完成对ADAS控制器法规要求下的功能测试,且测试成本低,可复用性好,使用ADAS HiL测试可以有效提高研发进度,缩短上市时间,降低路试风险。
技术先进、成熟稳定的ADAS HiL测试系统,可以在实验室阶段实现ADAS的各种控制功能和故障诊断功能验证,从而缩短路试时间、减少路试成本,降低路试风险。
4、什么是HiL测试
ECU的V模型开发流程本文不在描述,HIL测试作为V流程中的重要一环,不仅可以验证功能算法的逻辑性,减少实车路试测试,还可以模拟极限工况。
HIL测试是对产品级的黑盒测试,简单来说就是真实的ECU硬件+虚拟的被控对象,是一个闭环测试。通过软硬件平台建立虚拟的被控对象,再给定输入信号并检测输出信号,以验证ECU的各项功能。HIL测试有两个环节较为重要,一个是虚拟运行环境的搭建,另一个就是ECU输入输出信号的模拟和监控。
但是ADAS系统 HIL测试比常规ECU的HIL测试复杂的多,成本也更高。主要体现在搭建虚拟的ECU运行环境上,既要模拟毫米波雷达探测到的目标,也要模拟摄像头拍摄到的真实场景。这就需要场景仿真软件以及视频暗箱和雷达暗箱系统等硬件。
笔者介绍的HIL测试用到的硬件主要有上位机、NI机柜、视频暗箱、雷达模拟器。
硬件结构如下图所示,其作用将会在后续文中提及。
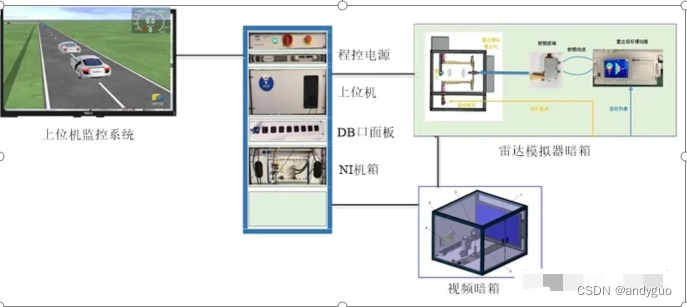
主要用到的软件有CarMaker、NI-Veristand以及Matlab/Simulink,在测试过程中信号传递流程如下图所示。
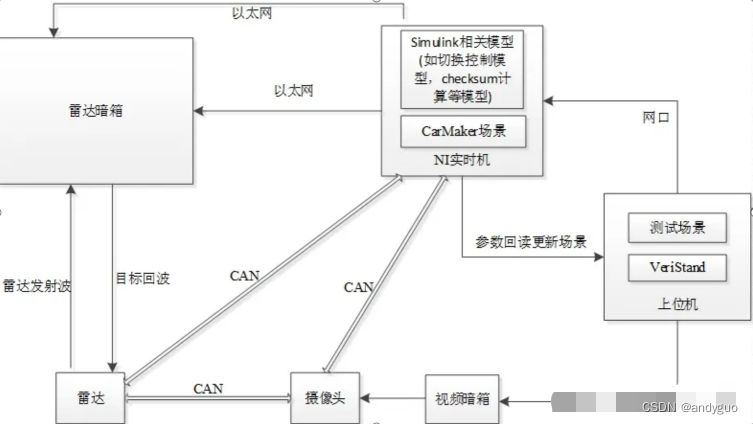
首先,由上位机通过VeriStand软件将CarMaker的测试场景下载至NI实时机中,场景运行的相关参数,比如车速、方向盘转角、油门踏板开度、目标的运动信息等相关信号,这些信号主要是分两路发送,一路是通过CAN卡发送给摄像头控制器,同时摄像头采集分屏器上场景运行的信息;另一路则是通过以太网发送给雷达目标模拟器。 NI实时机还通过以太网与电机控制器相连,将计算得到的电机(雷达暗箱中的运行机构)运动参数发给电机控制器,控制电机带动射频前端运动,模拟目标方位信息。雷达目标模拟器接收NI实时仿真机目标的运动信息和射频前端接收到的毫米波雷达传感器信号,通过计算,向射频前端返回目标的回波信息,进而雷达接收到目标的回波信息。毫米波雷达与摄像头通过CAN网络进行通信,摄像头通过CAN网络将其识别的目标参数发送给雷达,再通过融合算法实现雷达与摄像头的数据融合,输出目标信息,进而做出相关的控制策略,得出的策略通过CAN卡再发送给NI实时机,在测试场景中直观的表现出来。整个测试过程中数据信号形成了一个闭环。
![[前端笔记——CSS] 12.处理不同方向文本](https://img-blog.csdnimg.cn/e384135dcc3444dea61e8b2b903fb86b.png)